汽车纵梁点焊机器人工作站设计
2011-11-14杨海澜华学明吴毅雄
李 芳,杨海澜,华学明,吴毅雄,3,朱 麟
(1.上海交通大学,上海 200240;2.上海市激光制造与材料改性重点实验室,上海 200240;3.上海交通大学 金属基复合材料国家重点实验室,上海 200030;4.上海拖拉机内燃机有限公司,上海 200433)
汽车纵梁点焊机器人工作站设计
李 芳1,2,杨海澜1,2,华学明1,2,吴毅雄1,2,3,朱 麟4
(1.上海交通大学,上海 200240;2.上海市激光制造与材料改性重点实验室,上海 200240;3.上海交通大学 金属基复合材料国家重点实验室,上海 200030;4.上海拖拉机内燃机有限公司,上海 200433)
针对汽车前纵梁焊接生产线中的点焊工位,设计了基于MOTOMAN ES165型点焊机器人工作站,介绍点焊机器人工作站的工作原理、系统组成和焊接应用。采用离线仿真技术对机器人工作状态进行模拟,合理有效地分配焊点,优化工位配置。设计了欧姆龙PLC和触摸屏控制系统,实现机器人工作站自动、手动操作方式,人机对话界面良好,具有报警和指示功能。实际应用表明,焊接系统稳定,焊点质量优良。
点焊;示教;机器人;工作站
0 前言
汽车制造业是焊接机器人最主要的应用领域之一。由于汽车制造需要不断改进旧车型和研发新车型,能否及时焊接出符合装车要求的样件成为汽车零部件制造企业赢取市场先机的关键环节。焊接机器人开拓了一种柔性的生产方式,利用机器人的示教再现功能可以进行任务转换,而不需要改变任何硬件。因此,在一条机器人生产线上可以同时自动生产若干种汽车零件[1]。本研究开发了前纵梁点焊机器人工作站,实现了前纵梁总成件的自动化焊接加工。
1 点焊机器人工作站总体构成
前纵梁总成件如图1所示,一共由6台点焊机器人工作站组成焊接流水线。在此以其中一个工作站为例进行介绍。点焊机器人工作站系统一般由点焊机器人本体及机器人控制柜、点焊钳、点焊控制器、电极修磨机、操作箱和相关电缆、气/水管路等构成。典型的点焊机器人工作站系统构成如图2所示。
1.1 点焊机器人选择
为了满足焊枪的位置和空间姿态的控制要求,机器人应该具有六个关节,如图3所示。其中三个自由度(S/L/U)用于控制焊枪端部的空间位置,另外三个自由度(R/B/T)用于控制焊枪的空间姿态。
日本安川公司针对点焊系统开发设计了专门的MOTOMAN-ES系列机器人,将焊钳电源、控制电缆及气管水管等藏于机器人本体内臂的内部,机器人手臂结构紧凑,腕部回转动作范围±200°①首钢莫托曼机器人有限公司.点焊专用机器人MOTOMAN-ES系列说明书,2005.,使得机器人可以轻松焊接以往由于形状约束而难以焊接的工件。采用电缆等内藏式设计有效地解决了电缆的干涉问题。考虑本系统的载重,选择了ES165型点焊机器人本体,配NX100型控制柜。
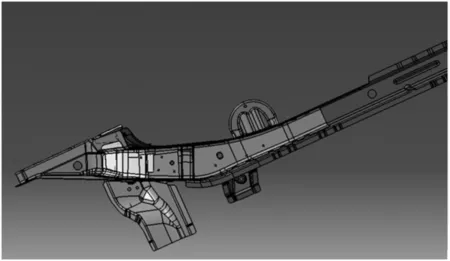
图1 前纵梁总成件
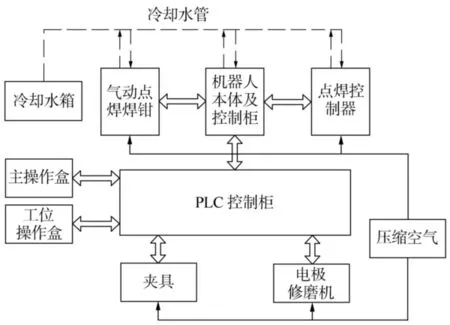
图2 点焊机器人工作站系统

图3 点焊机器的六个自由度示意
1.2 点焊机器人工作站布置方案
纵梁零件为左右对称件。因此,对于每一个工作站分别设计了两个工位,实现对左件、右件的焊接,工作站的布置示意如图4所示。
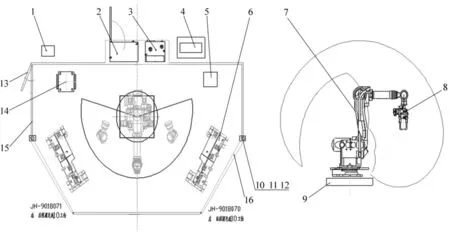
图4 点焊机器人工作站布置示意
2 点焊机器人工作站控制系统设计
2.1 离线仿真
机器人是多自由度、多连杆的空间机构,其运动学和动力学问题十分复杂,在其设计过程中,首先要对其进行运动学分析和轨迹规划设计。利用离线编程软件,对机器人操作臂运动控制以及实际工作环境应用中的障碍避让和碰撞干涉等诸多问题进行模拟仿真,这样就可以提高设计效率,使得生产中可以快速、高效地完成生产任务[2]。通过离线编程,可以优化设计方案、确认干涉点、优化焊钳选型、实现工作节拍平衡,最终确认现场布置图等。为精确设计提供了依据,缩短了方案设计周期,同时也降低了项目的运行成本。离线编程技术的应用,有效提高了现场调试速度、打点精度,使程序流程和路径更加优化。离线仿真结果如图5所示。
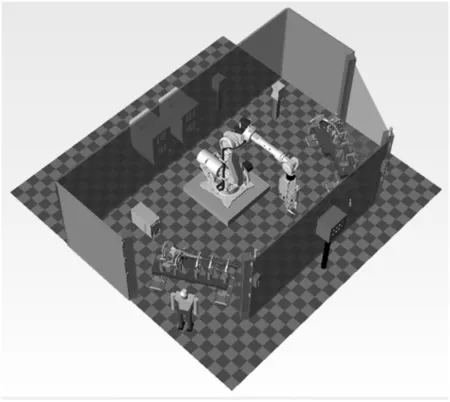
图5 系统离线仿真示意
2.2 PLC控制系统设计
PLC控制系统应具备的功能主要有:(1)与机器人保持实时的信息交流;(2)实现对机器人的控制,可以进行自动、手动操作方式;(3)实现对夹具等工装的控制,满足工人操作的需要,方便工件的装卡;(4)采用触摸屏作为主操作盒,并与PLC控制器进行通信;(5)具有故障检测和报警指示功能,如围栏安全门锁、安全光栅、急停按钮和夹具汽缸到位磁性检测开关、工件安装防错检测开关等。针对机器人中不同的工作程序,如主程序、工位1子程序、工位2子程序、电极修磨程序等,通过I/O口设计不同组合的编码。当按下起动键后,机器人根据接收到的编码,调用不同的子程序,实现对不同工位的动作。机器人集成系统配电信号示意如图6所示。
机器人工作站的工作顺序如下:首先接通机器人变压器、点焊控制器、系统控制箱、机器人控制箱各部分电源,再开起冷却水阀、气阀开关。并要保证调出示教编程器内的主程序,将触摸屏上的选择开关旋至“遥控”档。然后就可以通过各个工位上的操作盒对工作站系统做“傻瓜式”操作。例如,工位1由人工装件,按1工位操作盒的“夹紧”按钮,则气动夹具夹紧工件,按工位操作盒的“起动”按钮,则机器人根据已经编好的运动程序,自动焊接。同时2工位人工装件并气动夹紧后,按“起动”按钮,2工位“预约”成功,待焊。当机器人焊完1工位工件的焊接任务后,自动移至2工位焊接,同时1工位夹具松开,人工再次进行工件的装卸,以此类推,重复动作。
考虑到机器人工作时的安全性要求,PLC程序中做了完备的报警指示功能。其中包括:压缩空气、冷却水、安全门、安全光栅以及NX100机器人等报警指示功能,并通过系统触摸屏及工位三色灯给予相应的指示。如果一旦有故障发生,则机器人控制柜会切断机器人电源,机器人自动停止运动。待故障排除后再重新开始工作。
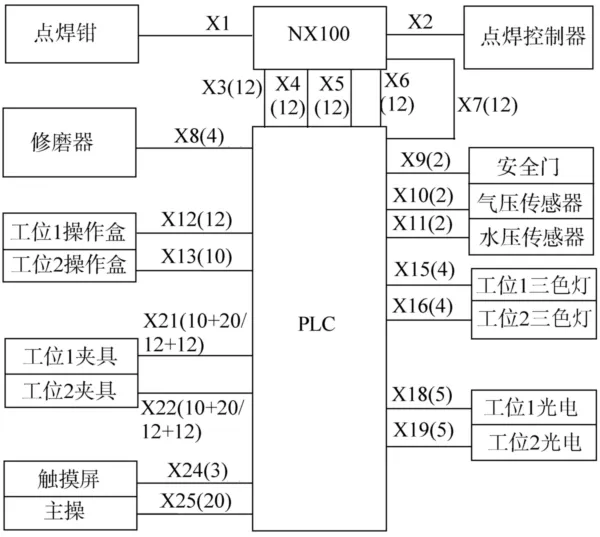
图6 机器人集成系统配电信号示意
3 实际应用
目前所设计的前纵梁总成件点焊机器人流水线系统已经投入使用,与传统焊接方式相比,操作简单,大幅度提高了生产效率,降低了劳动强度,焊接质量稳定,焊点成形美观。
4 结论
(1)设计了PLC及触摸屏控制系统,实现了机器人工作站自动、手动操作方式,并具有良好的人机对话界面,报警和指示功能明确。
(2)实践应用表明,焊接系统稳定,焊点质量优良,具有良好的推广意义。
[1]林尚扬,陈善本,李成桐.焊接机器人及其应用[M].北京:机械工业出版社,2000.
[2]宋玉银,方明伦,杨洪夫,等.机器人图形仿真系统的研制[J].机械工业自动化,1994,16(3):18-20.
Design of spot welding robot workstation for longitudinal beam in automobile
LI Fang1,2,YANG Hai-lan1,2,HUA Xue-ming1,2,WU Yi-xiong1,2,3,ZHU Lin4
(1.School of Materials Science and Eng.,Shanghai Jiaotong Univ.,Shanghai 200240,China;2.Shanghai Key Laboratory of Materials Laser Processing and Modification,Shanghai 200240,China;3.State Key Laboratory of Metal Matrix Composites,Shanghai Jiaotong Univ.,Shanghai 200240,China;4.Shanghai Tractor&Internal Combustion Engine Co.,Ltd.,Shanghai 200433,China)
This paper presents a spot welding robot workstation for before longitudinal beam in automobile.It is introduced the principle,the system composition and the welding application,which has designed based on MOTOMAN ES165 spot welding robot.The research is used the off-line emulation technique to simulate the robot active status in order to make the spots assignment reasonable and effectively.The control system which has realized the operation way automatically or manually,and has the good human-machine interface is designed through OMRON PLC and touch screen.The application indicated that the welding system is stable;excellent production quality.
spot weld;teaching;robot;workstation
TG438.2
A
1001-2303(2011)07-0007-03
2010-07-07;
2011-02-20
李 芳(1978—),女,河北磁县人,助理研究员,博士,主要从事数字化焊接电源的研究工作。
