多变量智能协调控制系统设计应用①
2011-10-30郑亚锋陈西杰
郑亚锋, 陈西杰
(国核电力规划设计研究院, 北京 100094)
多变量智能协调控制系统设计应用①
郑亚锋, 陈西杰
(国核电力规划设计研究院, 北京 100094)
针对火电机组被控对象非线性、迟滞、燃料大惯性并存的特性,建立了330 MW单元机组协调控制系统非线性模型,并对此模型在额定工况点下进行线性化,以此线性化模型为基础,在机组原有的协调控制系统中增加多变量解耦控制器,进而设计出与之对应的多变量协调控制系统,并通过工程试验与机组原有的协调控制效果相比较,实际结果证明了多变量智能协调控制系统的有效性和实用性。
解耦控制; 多变量控制; 协调控制; 控制模型
火电机组被控对象通常是具有非线性、参数慢变以及迟滞与大惯性并存的多变量系统,其中单元机组协调控制系统的设计与投运一直是热工自动化领域的重要研究课题之一。文献[1]采用机理分析和数据拟合的方法,建立了330 MW机组滑压运行方式下大范围变负荷的模型,该模型具有简化的形式和较低的阶次,能够反映机组的基本动态特性和非线性,经过机组运行数据验证,该模型具有较好的复现性,可用于控制系统的设计和控制算法的性能评价;文献[2]介绍了协调控制系统多变量解耦设计的基本思想;文献[3]根据单元机组的低阶非线性模型,经过适当的简化,推导出一个双入双出、能够描述机组动态特性及机炉间相互耦合关系的传递函数矩阵,以该矩阵为基础,采用多变量内模控制IMC(internal model control)方法对单元机组协调控制系统进行设计,为方便在实际工程中实现,推导出该控制器的比例积分微分PID(proportion integration differentiation)实现形式,仿真表明该控制器具有良好的解耦效果和负荷适应能力。
本文根据文献[1]建立330 MW亚临界机组简化模型,以此简化模型为基础设计多变量协调控制器。通过实际工程应用对比得出多变量协调控制器比原有控制器具有更加优良的控制性能,而且此协调控制策略现场调试方便简易,具有良好的工程实用意义。
1 机组模型的建立
在此针对内蒙达电亚临界330 MW单元机组建立协调控制系统低阶非线性模型。该机组锅炉为北京B&W公司制造的B&WB-1025/18.44-M亚临界一次中间再热单汽包自然循环煤粉炉;汽轮机为北重-阿尔斯通公司生产的T2A-330-30-2F-1080亚临界一次再热三缸双排汽凝汽式汽轮机,此机组在国内火力发电厂中具有一定代表性。如图1该机组模型不仅反映了系统间的能量平衡关系,而且体现了系统中存在的非线性特征。
根据现场试验所得到的实际数据,结合文献[1]的330 MW建模方法,得到达电亚临界330 MW机组简化模型为
(1)
(2)

(3)

(4)
pt=pb-0.000 138(6.31rB)1.5
(5)

汽轮机调节级压力可以描述为p1=ptμT/100。
图1中,B为进入炉膛的燃料量(炉侧控制量,t);μ为主蒸汽调节阀开度(机侧控制量,%);N为汽轮机的输出功率,MW;pT为主蒸汽压力(主蒸汽调节阀前压力MPa);pD为汽包压力,MPa;pSH为从汽包到主蒸汽调节阀的压力降,MPa;DQ为锅炉受热面总有效吸热量,%;DT为进入汽轮机的蒸汽量;c为锅炉及蒸汽管道的蓄热系数;kSH为过热器管道的阻力系数。

图1 单元机组低阶非线性模型
在一定的简化前提下对图1所示的非线性模型依据文献[5,6]进行线性化处理,得到亚临界单元机组协调系统的近似动态模型为
牛瘤胃积食是由于牛一次性采食大量粗饲料或精饲料,导致牛瘤胃体积迅速增加,胃壁严重扩张,使瘤胃正常的消化机能和运动机能紊乱的一种前胃疾病[3]。发病后,患病牛食欲停止,鼻镜干燥,反刍停止,先是嗳气不断,随后逐渐停止,腰背拱起,不断回头顾腹,摇尾呻吟,左下腹部轻度膨大,眼结膜充血发绀。触诊瘤胃,患病牛表现出抗拒,瘤胃内容物间有如石块,轻轻按压,留有指痕。用手叩诊瘤胃呈现浊音,呼吸急促,排便次数减少,粪便干燥,外观呈现紫黑色,恶臭难闻。个别患病牛会继发出现肠臌胀。发病严重的患病牛,机体逐渐脱水,不能正常行走,行走中左右摇摆,四肢震颤,心律不齐,全身衰竭,卧地不起,严重的会导致衰竭死亡。
(6)
式中:T(s)描述汽轮机的做功过程;B(s)近似代表燃料动态;G0(s)是机炉协调系统的核心模型。
模型公式(6)在100%负荷工作点(负荷330 MW;压力17.6 MPa;燃料指令52.28%;调门开度79.60%),线性化模型可以描述为

(7)

(8)
(9)
(10)
2 多变量协调控制系统应用设计
2.1 控制器模型设计
(11)
2.2 多变量控制器组态实现
根据解耦控制器公式(11),可得多变量解耦控制器的基本原理,即在原有压力控制器和负荷控制器的基础上,再增加一个解耦控制器,如图2所示。其中压力控制器和负荷控制器为比例控制器,解耦控制器是由4个PID控制器构成。
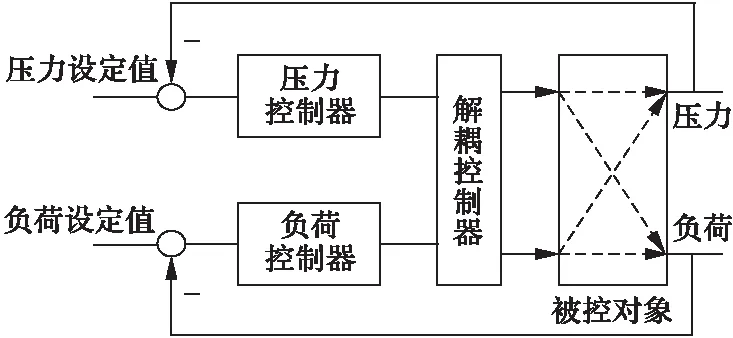
图2 多变量解耦控制器基本原理
把图2中压力和负荷控制器合并到解耦控制器,得到如图3所示的多变量解耦控制器结构。其中K11~K22为各控制分量。在此考虑以K11和K22为控制主通道,K11在需要跟踪的时候跟踪燃料站的输出,而K22跟踪汽机站的输出,同时交叉解耦通道K12和K21跟踪0。这样,可以保证在控制系统从手动到自动时切换无扰。
图4所示为达电330 MW机组多变量解耦控制器核心部分组态图。该图是依据图3中的结构原理,解耦控制子回路采用INFI-90功能码156实现的。图4中:模块APID-K11为压力主控制器,APID-K12为负荷解耦控制器,APID-K21为压力解耦控制器,APID-K22为负荷主控制器。
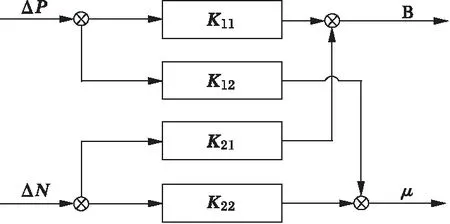
图3 多变量解耦控制器结构简图

图4 多变量解耦控制器的工程组态
3 工程应用
把上述设计的智能协调控制系统在内蒙达电亚临界330 MW单元机组上应用。从试投运行曲线上可以看出此控制系统的优良控制品质。
图5为机组DEB协调控制效果,其曲线1~6分别为燃料指令反馈、主汽调门指令、主汽压力定值、主汽压力、实际负荷、负荷指令。负荷指令变化8 MW,压力定值变化0.1 MPa时,压力最大偏差0.48 MPa,负荷最大偏差6 MW。

图5 单元机组原来的DEB协调控制效果
图6中,曲线1~6分别为实际负荷、主汽压力、主汽压力定值、负荷指令、燃料指令、主汽调门指令。负荷定值从320 MW减到270 MW,变负荷速率为7 MW/min,压力定值采用滑压运行。稳态时压力最大偏差0.4 MPa,负荷最大偏差2.5 MW。
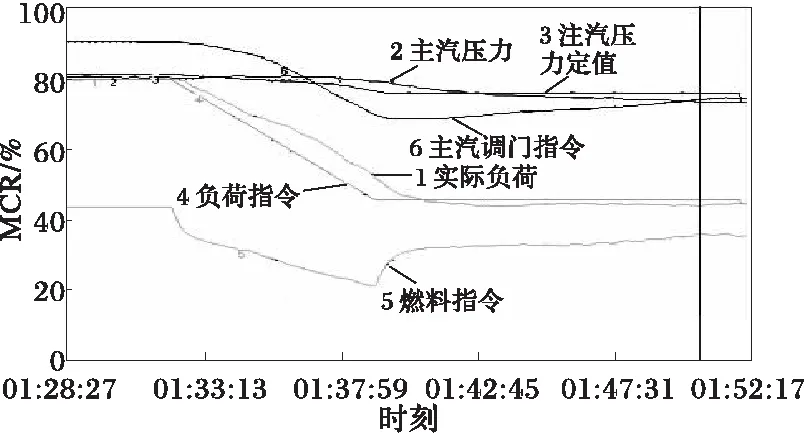
图6 改造后智能协调控制效果
图7中,曲线1~6分别为实际负荷、主汽压力、主汽压力定值、负荷指令、燃料指令、主汽调门指令。4 h内,包括吹灰过程,压力最大偏差0.4 MPa,负荷最大偏差2.5 MW。

图7 改造后一段时间内的智能协调控制效果
从以上控制效果图可以看出机组运用新型智能控制系统改造后,其在稳态和动态控制品质上都有了明显的改善,能够满足大负荷变化和高速率调节的控制要求。这是由于多变量解耦控制器大大减少了各输入变量之间的耦合特性而产生的结果。
4 结语
通过对改造前后运行曲线的比较,可以看出通过改造加入多变量解耦控制器后的系统控制效果良好,系统的稳态性能得到了明显改善,并可以在协调方式下进行稳定、快速的升降负荷,比手动方式升降负荷既快又稳,大大增强了机组的安全稳定性。这表明使用多变量控制器后的智能协调控制系统动态和静态品质比之前都有很大改善,变负荷过程响应时间缩短,动静态偏差明显减少,自动运行效果得到改善。该多变量智能协调控制系统与原来的DEB协调控制系统的适用工况是相同的,即适用于除机组启停外的正常运行、调峰、保护等工况,且满足长期运行的需要,可广泛投入工程应用中。
[1] 田亮,刘吉臻,曾德良,等(Tian Liang,Liu Jizhen,Zeng Deliang,etal).简化的330 MW机组非线性动态模型(A simplified non-linear dynamic model of 330 MW unit)[J].中国电机工程学报(Proceedings of the CSEE), 2004, 24(8):180-184.
[2] 刘吉臻.协调控制与给水全程控制[M].北京:中国电力出版社, 1993.
[3] 房方,刘吉臻,谭文(Fang Fang,Liu Jizhen,Tan Wen). 火电单元机组协调控制系统的多变量IMC-PID设计(Multivariable IMC-PID design in the coordinated control system for fossil unit power plants)[J].动力工程(Power Engineering), 2004, 24(3):360-365.
[4] 李道林(Li Daolin).国产电站锅炉再热汽温调节实用技术探讨(Discussion on the practical technology for reheat steam temperature adjustment in domestic utility boilers)[J].动力工程(Power Engineering), 1999,19(1):17-22,77-78.
[5] 陈彦桥,郑亚锋,刘吉臻,等(Chen Yanqiao,Zheng Yafeng,Liu Jizhen,etal).基于动态解耦的模糊多模型协调控制系统应用研究(The application study for coordinated control system of fuzzy multi-model based on dynamic decoupling)[J].中国电机工程学报(Proceedings of the CSEE), 2006, 26(12):166-170.
[6] 房方,刘吉臻(Fang Fang,Liu Jizhen).单元机组协调控制系统的非线性控制研究(Nonlinear control for the coordinated system of generating unit)[J].中国电力(Electric Power), 2004, 37(7):61-65.
[7] 郑亚锋,陈彦桥,卫平宝,等(Zheng Yafeng,Chen Yanqiao,Wei Pingbao,etal).基于模糊多模型330 MW单元机组协调控制系统(Research on coordinated control system of 330 MW unit based on fuzzy multiple model)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA), 2006, 18(2):71-74,104.
DesignApplicationofMultivariableIntelligentCoordinatedControlSystem
ZHENG Ya-feng, CHEN Xi-jie
(State Nuclear Electric Power Planning Design & Research Institute, Beijing 100094, China)
The controlled object for the thermal power is a rather complicated multivariable nonlinear control system,which is characteristic of nonlinear,delay and great inertial.A nonlinear model of the coordinated control system for 330 MW unit plant was constructed,and it was linearized under rated work conditions.The multivariable coordinated control system of increase in multi-variable decouping controller for original coordinated control system is designed to the corresponding systems,and control result contrast of field investigation shows its validity and practicability.
decoupling control; multi-variable control; coordinated control; control model
2009-08-04
2009-10-29
TP273
A
1003-8930(2011)01-0145-04
郑亚锋(1980-),男,工学硕士,工程师,主要从事发电厂热控设计。Email:zyf0556@126.com 陈西杰(1969-),男,高级工程师,主任工程师,主要从事发电厂热控设计。Email:chenxijie@snpdri.com
