火电厂主汽温度串级模糊控制系统应用研究
2014-08-02田思庆吴桂云王宇春田洋硕
田思庆 魏 强 吴桂云 王宇春 田洋硕
(佳木斯大学信息电子技术学院,黑龙江 佳木斯 154007)
串级控制在火电厂主汽温度实时控制中占有主要地位,但其控制效果并不十分理想,很难达到预期的控制效果。针对火电厂主汽温度的控制,国内外电厂控制领域的专家、学者都在不断地寻找更优化的控制策略。模糊控制是由控制理论与模糊集合理论相结合发展而来的一种新型控制技术,能够解决复杂被控对象的控制问题,但也存在一定的缺陷,如果单一地采用模糊控制对火电厂主汽温度进行控制,也很难达到预期目的。
针对火电厂主汽温度的控制环境和要求,笔者结合模糊控制和串级控制的优势,设计了一种串级模糊控制方法,并将火电厂主汽温度串级控制系统和串级模糊控制系统进行仿真对比。
1 主汽温度串级控制系统①
串级控制系统的基本结构如图1所示,主汽温度θ1由副回路粗调,引入的负反馈θ2构成的副回路起到稳定的作用,使主汽温度基本保持恒定。主汽温度的设定值由主控制器PID来保证,如果θ1不等于设定值,主控制器就调整其输出信号IT1,同时副控制器也调整减温水流量,直到θ1与设定值相等。这里,主控制器的输出IT1作为副控制器的可变给定值[1]。图2为主汽温度串级控制系统结构。

图1 串级控制系统结构

图2 主汽温度串级控制系统结构
由于被控对象主汽温度具有滞后的特性,串级控制系统中设定了主、副两个控制器。其中,主信号是过热器的出口温度,导前信号是减温器的出口温度,副控制器的给定值是主控制器的输出信号。内扰的影响可以通过内回路的负反馈回路克服。所以在选择副参数时,应使副回路反应灵敏,干扰能在影响主参数之前被克服。在控制器选择时考虑到要使副控制器动作迅速,快速排除内扰,且副环的控制任务是粗调,所以使用比例P控制器就能符合工艺要求。主控制器用于细调,要保证主汽温度被调量没有静态误差,故采用PID控制[2]。
根据某火电厂实际系统的分析,加入蒸汽和烟气流量阶跃扰动后,对主汽温度串级控制系统进行仿真,仿真结构如图3所示。

图3 主汽温度串级控制系统仿真结构

图4 加入扰动后的主汽温度串级


图5 对象数学模型改变后的主汽温度
仿真结果表明,被控对象数学模型的变化对串级控制系统影响较大。串级控制系统的控制过程为衰减振荡,尽管可控而且对扰动信号有较好的自适应性,但由于过热器特性使其控制过程时间较长,超调量也很大,控制指标不理想。
2 主汽温度串级模糊控制系统
2.1 串级模糊控制系统的设计
设定模糊控制器的两个输入量为设定温度e和温度变化率ec,输出量为u。模糊控制器的温度E={NB,NM,ZE,PM,PB}(低于标准温度较大、低于标准温度较小、等于标准温度、高于标准温度较小、高于标准温度较大)、温度变化率EC={NB,NM,ZE,PM,PB} (温度下降的速率较快、温度下降的速率一般、温度没有变化,温度上升的速率一般、温度上升的速率较快)和阀门开度U={NB,NM,ZE,PM,PB} (喷水降温阀全关,半关,不动,半开,全开)3个模糊语言变量[4]。e、ec和u的模糊集整数论域均为[-2,2],且e、ec、u∈{-2,-1,0,1,2}。
语言变量论域的模糊子集由隶属函数μ(x)描述,操作者的经验或采用模糊统计方法可以确定隶属函数μ(x),e/ec/u的隶属度函数曲线如图6所示。由火电厂专家研究经验得到25条模糊控制规则,见表1。

图6 隶属度函数曲线
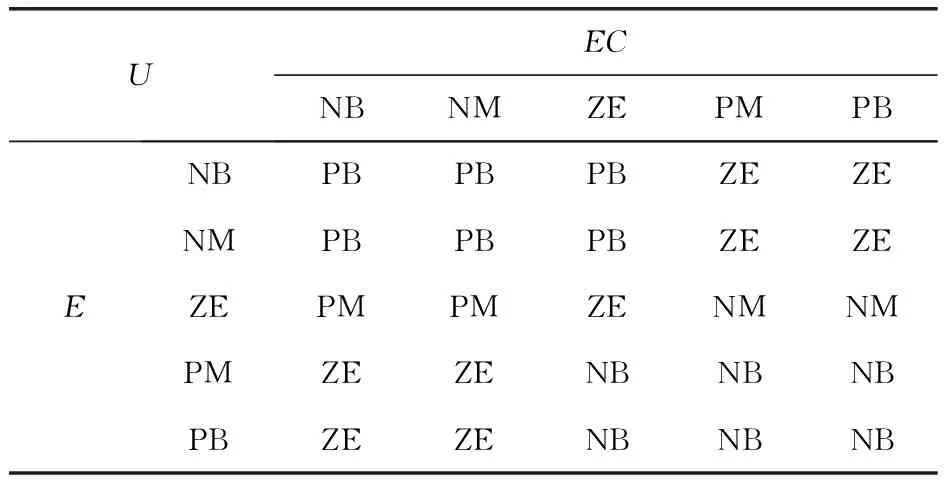
UECNBNMZEPMPBENBPBPBPBZEZENMPBPBPBZEZEZEPMPMZENMNMPMZEZENBNBNBPBZEZENBNBNB
2.2 仿真
在串级模糊控制中,模糊控制器作为副调节器,构建的主汽温度串级模糊控制系统如图7所示,主汽温度串级模糊控制系统仿真结构如图8所示。

图7 主汽温度串级模糊控制系统结构
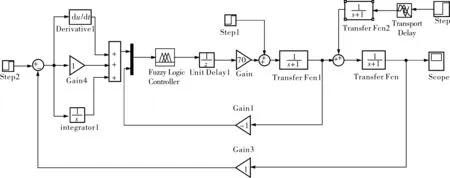
图8 主汽温度串级模糊控制系统的仿真结构
温度变送器的反馈系数为1,阀门特性为1,执行器的放大倍数为70。主控制器采用PID控制规则,且增加一个放大倍数为1的比例环节,这样就可以消除串级模糊控制系统的静态偏差。在t=10时,加入幅值为2的蒸汽流量阶跃扰动和烟气流量阶跃扰动后,主汽温度串级模糊控制系统的仿真结果如图9所示。
3 串级控制系统和串级模糊控制系统的比较
对比图4和图9,主汽温度串级模糊控制系统在过热器受到烟气和蒸汽流量扰动的情况下,无动态偏差和飞升曲线,控制效果优于主汽温度串级控制系统,能够保持较好的非周期和无静差指数曲线[5]。

图9 加入扰动的主汽温度串级模糊控制系统仿真曲线
4 结束语
针对火电厂过热器控制系统具有的大延迟、非线性和多变量特性,结合对过热汽温度的控制要求,设计火电厂主汽温度串级模糊控制策略,目的是将串级控制和模糊控制的优势进行互补。仿真结果表明:在加入烟气和蒸汽扰动的情况下,串级模糊控制系统具有较好的跟踪特性,能在较短的时间内克服干扰,恢复正常工作,控制质量优于串级控制系统。