永磁交流伺服系统直线位置的控制与实现
2011-10-20河南职业技术学院熊新国
河南职业技术学院 熊新国
郑州煤矿机械制造技工学校 张郑亮
永磁交流伺服系统直线位置的控制与实现
河南职业技术学院 熊新国
郑州煤矿机械制造技工学校 张郑亮

随着自动化控制水平的不断提高,越来越多的工业控制现场要求设备能够实现精确定位。因此,如何更方便、更准确地实现位置控制是现代工业控制领域的一个重要问题。目前,永磁交流伺服系统被广泛应用于位置控制领域。本文,笔者利用西门子S7-200系列PLC内置的高速脉冲串发生器作为驱动条件,采用松下MHMD022P1U永磁同步交流伺服电机以及MADDT1207003全数字交流永磁同步伺服驱动装置作为运动控制装置,提出了一种容易实现的直线位置控制方法。
一、永磁交流伺服系统简介
永磁交流伺服系统包括永磁同步交流伺服电动机和全数字交流永磁同步伺服驱动器两部分。伺服电机内部的转子是永磁铁,伺服驱动器控制U,V,W三相电源形成电磁场,伺服电机转子在此磁场的作用下转动。同时,伺服电机利用自带的编码器将当前的速度信号反馈给伺服驱动器,驱动器将反馈值与目标值进行比较,调整转子转动的角度,由此实现精确定位。该系统的主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降,具有很好的矩频特性。
二、基于S7-200PLC伺服系统直线位置控制总体思路
1.伺服系统位置控制的精确性主要取决于伺服驱动器和运动控制器的精度。高端的运动控制模块可以对伺服系统进行非常复杂的运动控制,但是在有些需要位置控制的场合,仅对位置精度的要求较高,而运动的复杂程度并不是很高,那么,就没有必要选择那些昂贵的高端运动控制系统了。
2.伺服系统配合可编程控制器在位置控制时可实现如下要求。
(1)直接位置控制。通过伺服电机驱动设备,可以实现从某起点一直运行至终点后停止。
(2)断点位置控制。通过伺服电机驱动设备运行,可以实现运行至中间某个位置后按停止按钮即可停止,下次按动启动按钮后可从断点运行至终点。
从以上叙述可以看出,如果只要求设备作直线位置控制,伺服系统完全可以在可编程控制器的配合下完成。
三、设计步骤
1.运动控制装置的选取。按照设计要求,系统要快速、准确地实现定位控制。经过多方面综合比较后,决定采用松下MHMD022P1U永磁同步交流伺服电机及MADDT1207003全数字交流永磁同步伺服驱动装置作为运动控制装置。该运动控制装置的主要特点是:响应快、精度高、体积小,具有共振抑制和控制功能以及全闭环控制功能,且控制方式多样,保护措施齐全,目前已被广泛应用于各种有精确调速、定位要求的场合。加之附带操作面板,控制和使用简便易行,具有稳妥方便的自动调整功能,控制方式多样化,保护设施齐全。
2.高速脉冲生成器的选取。高速脉冲生成器选用西门子S7-200系列PLC,该控制器具有体积小、编程简单、控制方便等优点。西门子CPU224XP有两个内置PTO/PWM发生器,用以产生高速脉冲串(PTO)或脉宽调节(PWM)信号波形。一个发生器指定给数字输出点Q0.0,另一个发生器指定给数字输出点Q0.1。两个脉冲发生器的最大脉冲输出频率为100kHz。在脉冲串输出方式中,PLC可生成一个50%占空比的脉冲串,用于步进电机或伺服电机的速度和位置的控制。
3.电气接线图的设计。MADDT1207003伺服系统驱动直线控制的电气接线设计如图1所示。

伺服驱动器面板上有多个接线端口,各端口功能介绍如下。
(1)X1为电源输入接口。AC220V电源连接到L1,L3主电源端子,同时连接到控制电源端子L1C,L2C上。
(2)X2为电机接口和外置再生放电电阻器接口。U,V,W端子用于连接伺服电机。
(3)X6为连接到伺服电机编码器信号接口。
(4)X5为I/O控制信号端口。
4.参数的设置。由于选用的电机编码器反馈脉冲为2 500pulse/rev,驱动器缺省反馈脉冲电子齿轮分-倍频值为4倍频,所以如果希望指令脉冲为6 000pulse/rev,那么就应把指令脉冲电子齿轮的分-倍频值设置为10 000/6 000,从而实现PLC每输出6 000个脉冲,伺服电机旋转1周。根据上述控制要求,相应伺服驱动器参数设置如表1所示。
5.直线位控程序的设计思路。为了简化用户应用程序中位控功能的使用,STEP7-Micro/WIN提供的位控向导可以帮助用户在较短时间内完成PTO的组态。向导可以生成位置指令,对速度和位置提供动态控制。
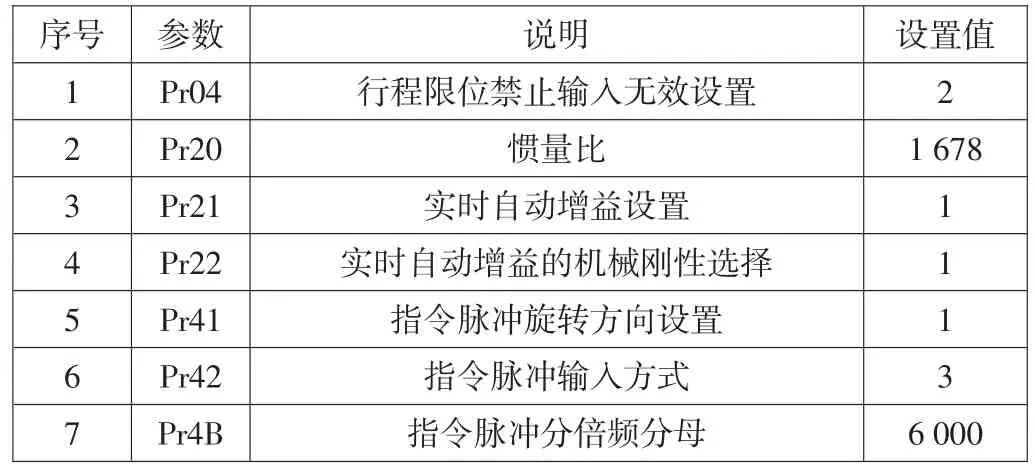
表 1 伺服驱动器参数设置
如果要求PLC执行存储于配置/包络表的指定包络运行操作,连续运行时的梯形图如图2所示。


四、调试时应注意的问题
根据指令特点可知,C_Pos参数在PTO向导的HSC计数器功能启用时,此参数包含以脉冲数作为模块的当前位置。所以,如果要求设备运行过程中中途按动停止按钮即能立即停止,下次按动启动按钮后能从断点继续运行,则只需加图3所示的两条程序即可。
1.伺服驱动器对伺服电动机响应控制的最佳值为负载惯量与电机转子惯量之比为1,最大比值不能超过5。通过机械传动装置的设计,可以使负载惯量与电机转子惯量之比接近1或更小。如果负载惯量确实很大,机械设计不可能使负载惯量与电机转子惯量之比小于5时,则可使用电机转子惯量较大的电机,即所谓的大惯量电机。但在使用大惯量电动机时,应达到一定的响应,驱动器的容量也要大一些。
2.在达到稳态前,系统将在偏差信号的作用下驱动电机加速或减速。若指令脉冲突然消失(如紧急停车时,PLC立即停止向伺服驱动器发出驱动脉冲),伺服电机仍会运行到反馈脉冲数等于指令脉冲消失前的脉冲数才停止。
本文,笔者提出的位置控制方法不需要专用的定位模块,即可轻松实现一些简单的位置与速度控制。这种方法具有硬件要求简单、容易实现等优点,目前已被应用于亚龙公司YL-335B自动线的定位控制,截至目前,系统总体运行状态良好。
