纱线毛羽特征参数提取算法研究
2011-10-20王井阳张立岩张继蕾
王井阳,刘 卫,张立岩,张继蕾
(河北科技大学信息科学与工程学院,河北石家庄 050018)
纱线毛羽的多少是评价经纱上浆效果好坏的一个重要指标,会对织物的外观和手感造成很大影响。因此,对纱线毛羽的检测及数量控制是十分必要的[1]。评价纱线毛羽的指标有毛羽长度、毛羽个数以及毛羽量。在纺织行业中,目前对纱线毛羽的检测方法主要有人工目测法和借助专业工具的检测方法。人工目测法具有对操作人员目力要求高、误差较大和效率低等缺点;借助专业工具的检测方法存在专用设备价格昂贵的缺点。
基于图像处理的纱线毛羽检测方法是以人工目测黑板法为基础的,其主要流程是先将纱线等距离地缠绕在有参照线的黑板上,通过数码照相机拍摄图像并输入到计算机中,获得毛羽的采样图;然后对采样图进行一系列的图像预处理工作(包括灰度变换、倾斜校正、去噪、锐化等),得到能清晰反映毛羽分布情况的二值图,利用形态学运算强化纱线的边缘;最后从形态学滤波处理后的二值图中提取出纱线周长、面积等特征参数,并进一步完成纱线毛羽的自动检测[2-3]。笔者主要研究从形态学滤波处理后的二值图中提取出特征参数并完成纱线毛羽的自动检测过程,其他步骤在此不予讨论。
纱线图片经过形态学滤波处理去噪声后图形如图1所示。将纱线区域从背景中分离出来后,图像中包含多个纱线连通区域,要获得纱线的外部形状特征,还需要对纱线区域的轮廓进行跟踪和提取。由于常用的轮廓跟踪算法[4]只是针对一个区域的图像信息进行特征提取而纱线图像中又包含多个纱线连通区域,故笔者提出一种能同时处理多个纱线区域毛羽特征提取的多区域轮廓跟踪算法,以提高特征参数提取的效率。
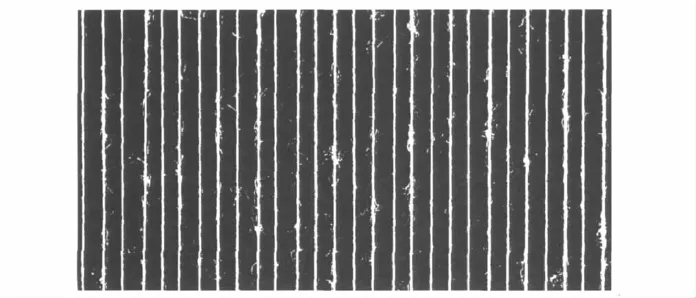
图1 形态学滤波处理后的毛羽二值图像Fig.1 Binary image of hairiness after morphological filtering
1 轮廓跟踪算法
轮廓跟踪也称边缘点连接,是指从图像上的一个边缘点出发,依次搜索边缘点邻域而确定下一个新的边缘点,并将它们连接进而逐步检测出边界的方法。链码法轮廓跟踪算法是一种常用的轮廓跟踪算法[5]。
链码法轮廓跟踪算法原理是按照从左到右、从上到下的顺序搜索图像,找到图像的第1个目标点(像素值为1的点),此点是轮廓最左上方的边界点,记为A点。A点的右、右下、下、左下4个邻点中至少有1个是轮廓点,记为B点。从B点的右邻接像素开始,按逆时针的顺序依次找出相邻点中的轮廓点C点。如果C点就是A点,则表明搜索完成;否则从C点继续搜索,直到找到A点为止。轮廓点的判断标准是它的4邻接域是否都不是目标点。
链码法轮廓跟踪算法的不足之处如下:1)这种算法要对区域中的每个边界点的8邻域进行跟踪检测,计算量大,检测速度比较慢;2)每次只能对1个区域进行轮廓跟踪,不能1次实现对多个区域的轮廓跟踪。
2 多区域轮廓跟踪算法
轮廓提取的结果直接关系到特征提取的有效性。为了提高纱线特征提取效率,实现对图像中多个纱线区域的轮廓提取,笔者在改进上述链码法轮廓跟踪算法的基础上,提出了多区域轮廓跟踪算法。
本算法的原理是在二值图像的扫描过程中,找到第1个纱线区域的轮廓点时,即执行轮廓跟踪算法,在轮廓跟踪过程中,标记当前纱线区域轮廓上的像素点(将轮廓点的灰度值改为当前区域的序号值),并记录当前轮廓点的坐标、链码等信息;完成当前纱线区域的轮廓跟踪后,需要对跟踪完成的纱线区域进行填充操作,即将区域内部的像素点进行填充标记(同样将区域内部点的灰度值改为当前区域的序号值);同时,将区域序号值加1。这样就可以排除干扰,准确地定位到下一个纱线区域的轮廓上,提取新的区域轮廓[6-7]。如此重复,直到纱线毛羽图像扫描完成。
设二值图像目标点的灰度值为TP,背景的灰度值为BP,轮廓区域序号初值为N(N≠TP,N≠BP),用CP代表当前扫描点的像素值,则纱线毛羽二值图像的多区域轮廓跟踪算法的步骤如下。
1)从二值图像的左上角开始逐行扫描图像,当扫描到像素点的值为TP时,记下当前点的坐标值(xN,yN),并把当前像素点的灰度标记为N,以此点为轮廓跟踪的起点。
2)从当前点出发,定义初始搜索方向为左上方;如果当前点左上方的像素灰度值为TP,则该点为纱线区域的边界点,否则搜索方向顺时针旋转45°。这样一直搜索下去,直到找到第1个灰度值为TP的点。为防止重复跟踪,记录下当前轮廓点的灰度标记值N、坐标值、链码值等数据。然后以新找到的轮廓点为搜索起点,在当前的搜索方向上逆时针旋转90°。
3)重复执行步骤2),直到返回最初的边界起始点(xN,yN)。
4)将当前轮廓区域的所有像素的值都赋为BP或者N,即对已跟踪过的轮廓进行区域填充。
5)跟踪标记N++,从点(xN,yN)开始重复执行以上步骤,直到跟踪完成图像中的所有纱线区域。
纱线毛羽二值图像的多区域轮廓跟踪算法流程图如图2所示。
3 特征参数提取
评价纱线毛羽的指标有毛羽长度、毛羽个数以及毛羽量。毛羽的长度反映在二维图像上即图像的周长和面积。在使用基于多区域轮廓跟踪算法提取纱线的轮廓后,对纱线毛羽图像的周长、面积进行提取。
3.1 区域周长
二维平面物体的周长定义为包围物体而不含于物体的边界长度。纱线区域的周长指纱线区域的轮廓长度,用P表示。
笔者用8连通链码的周长来计算纱线区域的周长,8连通链码周长不仅计算水平、垂直方向的链码点数,还计算了对角线方向的像素长度,接近于轮廓的实际周长。设像素的边长为单位1,将记录在纱线数据结构中的链码值取出,把各个轮廓的奇数链码个数Nd的倍和偶数链码个数Ne相加,即可求出各个纱线区域轮廓的周长,其计算公式为P=Nd+Ne。
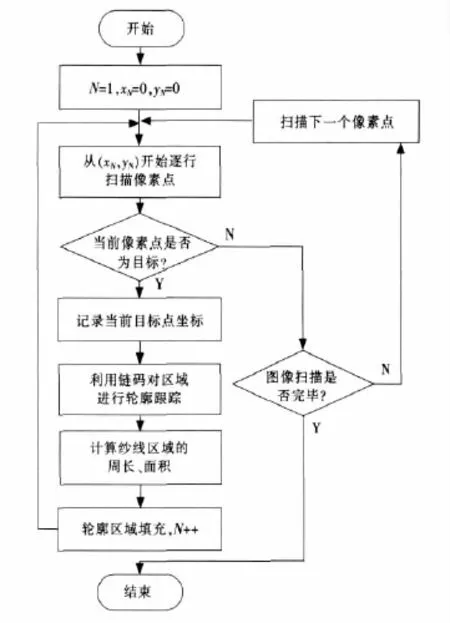
图2 多区域轮廓跟踪算法流程图Fig.2 Flow chart of multi-region contour tracking algorithm
3.2 区域面积
纱线区域的面积用来度量纱线的总尺寸,它描述了纱线轮廓区域的大小。纱线区域的面积S可通过对属于纱线区域的像素个数进行统计达到。
Green定理表明,在X-Y平面中的一个封闭曲线包围的面积S由其轮廓积分给定,公式为

将其进行离散后变为

其中Nb为边界点的像素的个数。
1)毛羽量的计算
毛羽量用H表示,图像中标准纱线区域的面积为St=S1+S3+S5+S7+S9;带有毛羽的纱线区域的面积为Sh=S2+S4+S6+S8+S10,毛羽量的计算公式为H=Sh-St。相对毛羽率的计算公式为R=(Sh-St)/St。
2)毛羽个数的计算
检测图像中不同长度的毛羽的个数,首先需要确定待检测纱线区域的个数,再检测每个纱线区域内的毛羽个数,最后将各个纱线区域内的毛羽个数相加,即得所有毛羽的个数。
检测标准纱线位置坐标的过程如下:找到图像起始像素,扫描图像第1行,当遇到像素值为1的点时计数器加1(计数器用来记录要检测的纱线区域的个数),继续扫描,若连续白色像素的个数大于设定值,则确定此线为纱线,再判断其是否为标准纱线,若是则记录标准纱线的地址,直到第1行扫描完毕。这样就可得出所有标准纱线的位置及要检测的纱线区域的个数。标准纱线定位流程图如图3所示。
毛羽计数算法流程可描述如下:以标准纱线横坐标与毛羽待检测长度之和为横坐标,扫描该列图像,若存在连续目标像素则表明存在1条毛羽,将毛羽个数加1,同时纱线检测次数减1,直到检测次数为0,即所有纱线区域都检测完毕。通过累加各个纱线区域的毛羽个数,得出待检测纱线的毛羽个数。
3)毛羽指数的计算
用I表示毛羽指数,毛羽指数的计算公式为I=Sh/St。
4 实验结果分析
本实验将待检测纱线和参照纱线均匀缠绕于黑板上,待检测纱线与参照线的固定间距为3mm,纱线长100mm,待检测的纱线条数为36。采用佳能IXUS70数码相机对纱线进行拍照,图片格式为JPEG,尺寸为2 048pix×1 536pix。背景黑板的规格为250mm×100mm×6mm。为清晰地显示纱线毛羽形态,本文图只显示了实际图像的截取部分。
对形态学滤波处理后的毛羽二值图像(图1)采用多区域轮廓跟踪算法轮廓提取后得到纱线轮廓,如图4所示。
对图4中的纱线进行各特征参数提取得到毛羽量为0.51,毛羽指数为1.51,毛羽个数如表1所示。

图3 标准纱线定位流程图Fig.3 Flow chart of standard yarn positioning
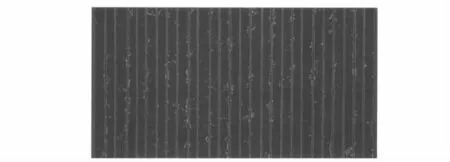
图4 纱线轮廓Fig.4 Yarn contour
人工目测是用照布镜和曲线尺数出4cm长度内的毛羽个数,计算机测量的数据采用浮点数运算。检测结果与目测结果之间的误差率(¯δ)计算公式为

式中:n为纱线区域的个数;xi为检测的结果数据;yi为人工目测的数据。

表1 检测结果对比Tab.1 Comparison of test results
根据式(3)可以计算出误差率¯δ=3.31%,在误差允许的范围(±5%)内,检测的结果与人工测量的结果是一致的,达到实际检测的要求。
实验证明,多区域轮廓跟踪算法不但可以对任意条纱线进行轮廓跟踪及特征提取,而且得到的边界曲线封闭连续,只有单像素宽。
5 结 语
提出了多区域轮廓跟踪算法,该算法对纱线的几何特征提取具有较高的精度和适应性,解决了必须将图像中的单条毛羽图像分割取出后才能进行轮廓跟踪的问题,实现了同时对多个纱线区域进行轮廓跟踪和提取。与人工目测黑板法相比,该方法提高了纱线毛羽的检测精度;与单区域轮廓跟踪算法相比,该方法提高了纱线毛羽的检测效率。
[1] 卢 明,刘一萍.纱线毛羽图像的二值化处理及其 Matlab实现[J].山东纺织科技(Shandong Textile Science &Technology),2009(2):37-39.
[2] 段培超,赵志强,高国明.改进的形态学航空图像边缘检测算法[J].河北科技大学学报(Journal of Hebei University of Science and Technology),2010,31(5):433-436.
[3] WANG Xiao-hong,WANG Jing-yang,ZHANG Ji-lei,et al.Study on the detection of yarn hairiness morphology based on image processing technique[J].International Conference on Machine Learning and Cybernetics,2010,5:2 332-2 336.
[4] 于纪征,孔晓东,曾贵华.基于均值漂移和边缘检测的轮廓跟踪算法[J].计算机仿真(Computer Simulation),2008,25(6):224-227.
[5] 刘梅华,汪 东,柳惠秋.一种改进的轮廓跟踪算法[J].机械设计与制造(Machinery Design &Manufacture),2008(5):45-47.
[6] 王玉亮.基于机器视觉的玉米种子品种识别与检测研究[D].泰安:山东农业大学,2008.
[7] 刘 禾.数字图像处理及应用[M].北京:中国电力出版社,2005.
