基于UG-NX6的渐开线斜齿圆柱齿轮参数化设计研究
2011-12-26李海涛蔡建军
李海涛,蔡建军
(1.河北机电职业技术学院机械工程学院,河北邢台 054048;2.河北科技大学机械电子工程学院,河北石家庄 050018)
基于UG-NX6的渐开线斜齿圆柱齿轮参数化设计研究
李海涛1,蔡建军2
(1.河北机电职业技术学院机械工程学院,河北邢台 054048;2.河北科技大学机械电子工程学院,河北石家庄 050018)
渐开线斜齿圆柱齿轮齿形轮廓复杂,其参数化设计困难。利用三维软件UG-NX6对斜齿圆柱齿轮进行三维建模,实现了改变参数就立即得到相应的渐开线斜齿圆柱齿轮三维模型的参数化设计。对其他具有复杂表面形状的形体参数化设计提供了参考。
参数化设计;渐开线斜齿圆柱齿轮;UG-NX6
以UG-NX6软件为平台,进行了渐开线斜齿圆柱齿轮(简称斜齿轮)参数化设计研究。运用软件提供的“表达式”功能,成功绘制渐开线曲线。通过辅助坐标绘图这一独特方式,建立了同一齿槽中2条渐开线的关联性。运用“插入/扫掠/扫掠”、“插入/关联复合/抽取”及“插入/关联复合/实体特征/圆形阵列”等命令,进行斜齿轮的三维建模,改变了“旋转成型法”建模过程复杂、处理速度慢的缺点[1],最终实现了斜齿轮参数化设计,同时给其他具有复杂表面轮廓零件的参数化设计提供了参考。
1 齿槽轮廓体的参数化建模
1.1 渐开线表达式的输入
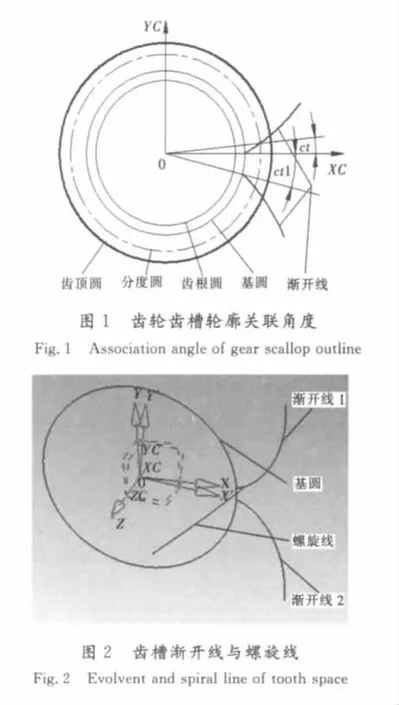
齿轮的一个齿槽包括2条渐开线,要实现齿槽渐开线轮廓的参数化绘图,有2个重要角度必须进行计算,分别是:ct=180×tanα/π-α(α为压力角);ct1=180/z-2ct(z为齿数)[1]。两角度标注如图1所示。
运用UG-NX6软件的“表达式”功能,可以绘制标准的渐开线曲线。在“模型”模块中,点击“工具/表达式”命令,弹出表达式设定对话框,然后依次输入表1所列表达式并设定单位(表达式的值可以暂定)。
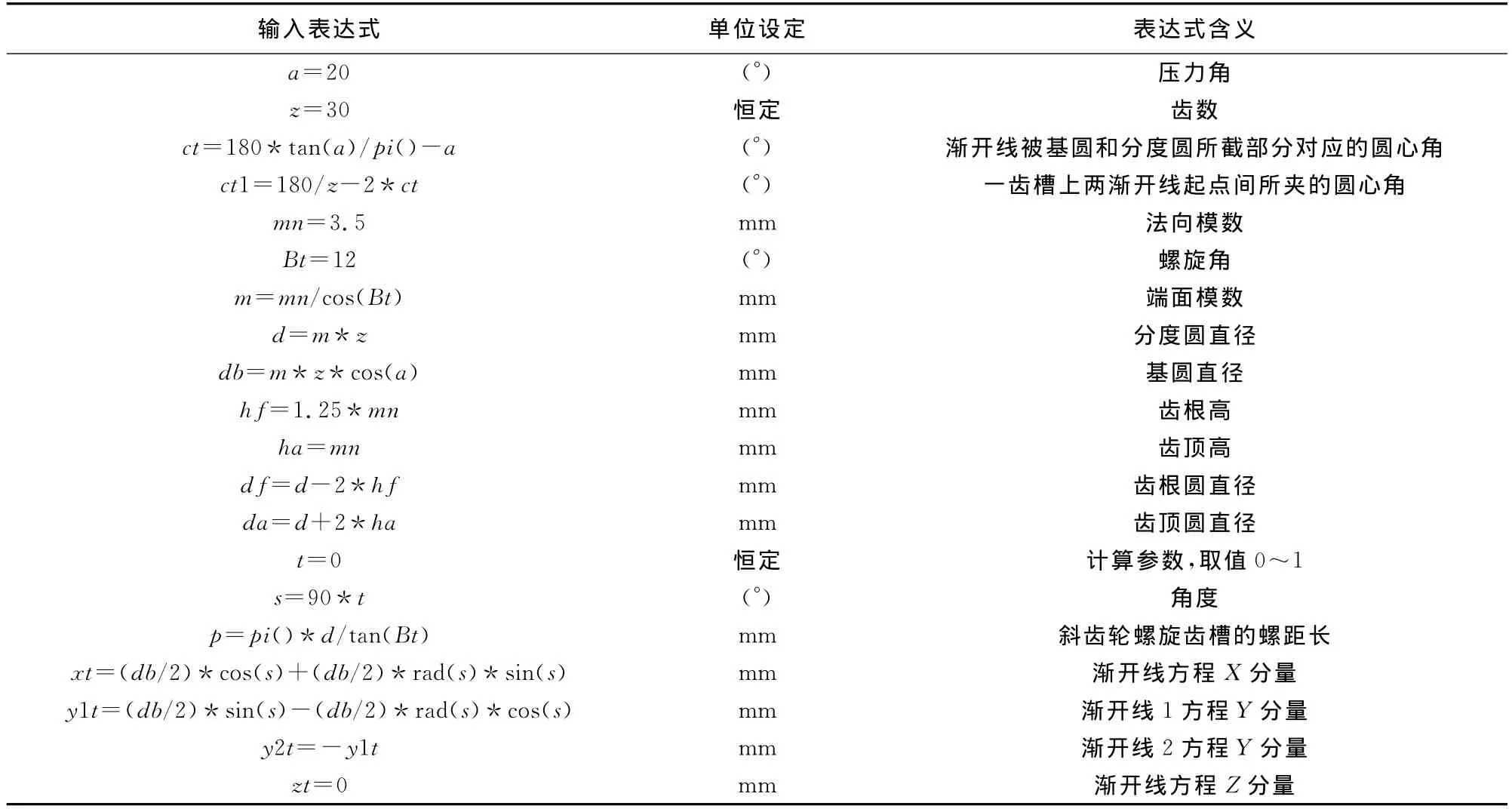
表1 参数表达式Tab.1 Expression sets
1.2 绘制齿槽的两渐开线及齿槽螺旋轨迹线
进入草图区,在XC-YC平面画1个圆,约束圆心在原点,直径为“db”,如图2所示。返回“模型”模块,运用“插入/基准/基准CSYS”命令建立一个新的辅助参考坐标系,在“基准CSYS对话框”中选择“偏置CSYS”项,使ZC轴旋转一个“-ct1”角度建立新的辅助参考系。使用“插入/曲线/规律曲线”命令(如果找不到,可到“工具/定制/命令”中查找,并拖曳到菜单项目中),定义X分量为“xt”,Y 分量为“y1t”,Z 分量为常数(值取0)[1-2],绘制渐开线1,如图2所示。同理,定义X分量为“xt”,Y 分量为“y2t”,Z 分量为常数(值取0),设定“CSYS参考”选项时,须选择新建辅助参考系,绘制渐开线2,如图2所示。
进入“模型”模块,执行“插入/曲线/螺旋线”命令,在弹出的对话框内输入圈数为0.08,螺距输入为“p”,选择“输入半径”的方式,长度输入为“d/2”,确定后生成齿槽螺旋轨迹线,如图2所示。
1.3 构建齿槽切割片体
进入草图区,在XC-YC平面内画1个圆,约束圆心在原点,标注直径为“df”,此圆为齿根圆。齿根处轮廓的绘制方式有2种。第1种:当齿数z≤41(从渐开线起点到齿根圆是直线),此时,先画两渐开线起点到圆心的连接直线,再反复运用“快速修剪”命令剪掉不属于齿槽轮廓的多余线段,点击“完成草图”;执行“插入/扫掠/扫掠”命令,随后弹出扫掠对话框,根据提示选择两渐开线和刚画好的草图作为“截面”曲线串,选择螺旋线为“引导线”,“截面选项”中定位方法改为“矢量方向”,选择矢量“Z轴”,单击确定后就形成5个曲面片体[1-2];最后运用“插入/组合/缝合”命令把它们缝合,形成一个齿槽切割片体,如图3a)所示。第2种:当齿数z>41(齿根部分的轮廓是渐开线曲线),此时,再次进入草图区画一圆弧,约束圆心在原点,标注直径为“df”,特别要注意保证有足够的弧长(否则不会产生与渐开线片体的相交,建议画成半圆);重复第1种情况中的扫掠步骤,分3次生成3个曲面片体(必须单独执行3次扫掠命令,否则不能完成后面的“修剪体”操作);用“插入/修剪/修剪体”命令,剪去不属于齿槽的多余部分;最后运用“插入/组合/缝合”命令缝合形成一个齿槽切割片体,如图3b)所示。
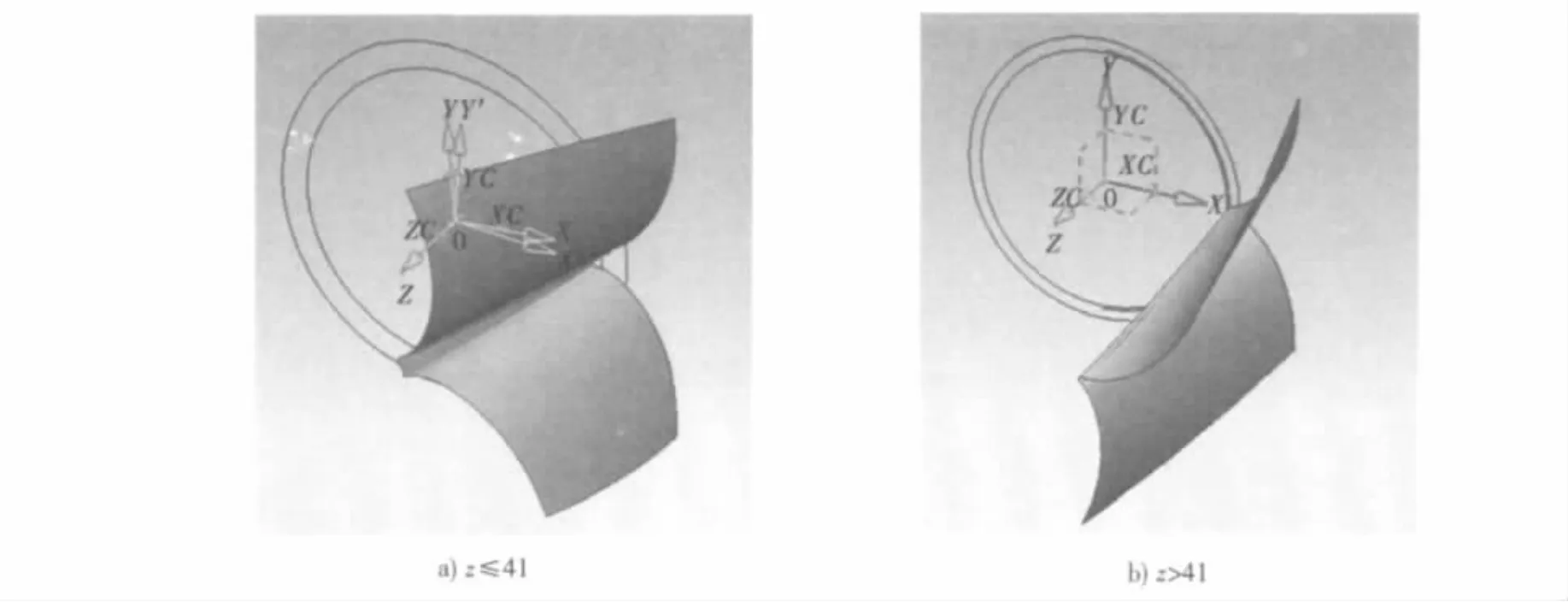
图3 齿槽切割片体Fig.3 Cut of tooth space
1.4 切割齿槽轮廓并抽取齿槽轮廓体特征
进入草图区,在XC-YC平面内画1个圆,约束圆心在原点,标注直径为“da”。以此草图为截面,拉伸一个圆柱实体,高度为30;用“插入/修剪/修剪体”命令切割齿槽轮廓。紧接着执行“插入/关联复制/抽取”命令(否则不能完成后期的布尔运算),选择“体”选项,并选择“隐藏原先的”选项,选取生成的齿槽轮廓后点击“确定”,以抽取齿槽轮廓体特征。
2 斜齿轮参数化模型的构建
再次拉伸一个圆柱实体,直径为“da”,高度为30。运用“插入/组合体/求交”命令与前面生成的齿槽轮廓进行布尔运算,生成斜齿轮槽体。执行“插入/关联复制/实体特征/圆形阵列”命令,选择齿槽特征,输入阵列数量为z,角度为360/z,基准轴选择ZC轴,点击“确定”,生成斜齿轮模型。此外,齿轮安装孔及键槽等结构的建模比较简单,可以根据具体设计需要确定。现在如果改变斜齿轮的参数,就立即得到相应的模型,实现了参数化设计,如图4所示。
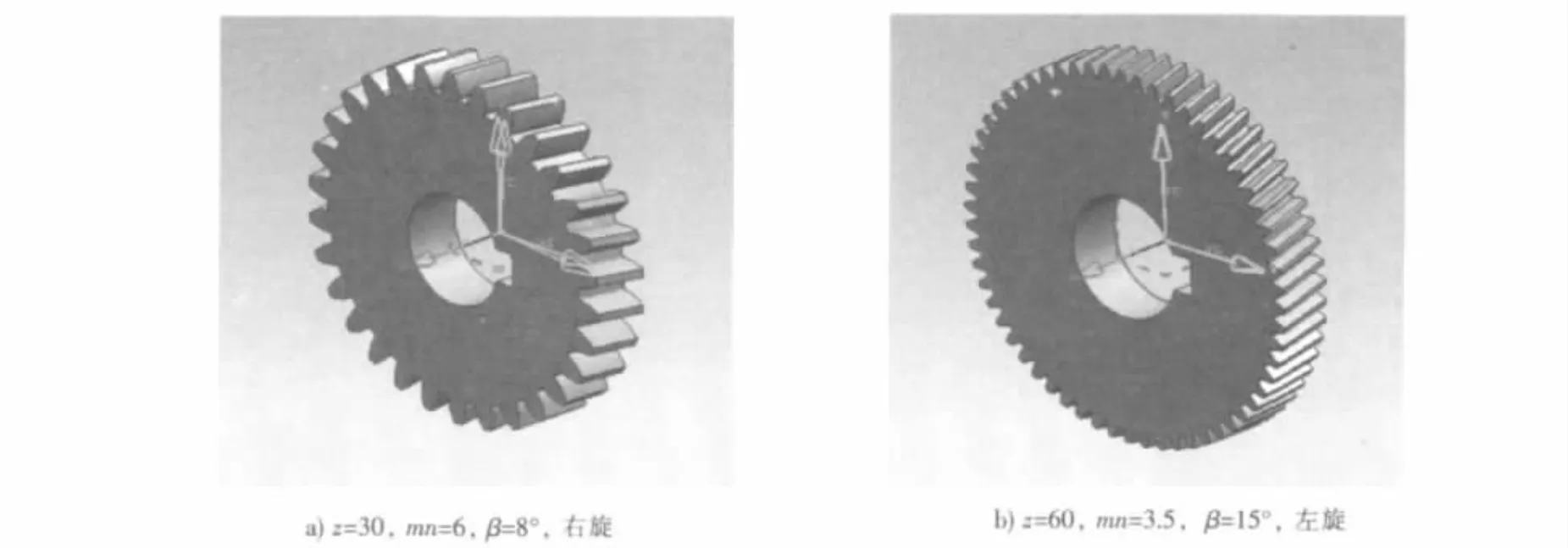
图4 改变参数后生成的斜齿轮三维模型Fig.4 Three-dimensional model of helical gear after changing parameters
3 结果与讨论
1)当齿数接近41时,齿根圆与基圆半径相差很小,这时须提高计算精度[1-3]。
2)本文第1.2节中,建立了一个新的参考系,是为画渐开线2做准备的。在“基准CSYS”对话框中选择“偏置CSYS”项,参考“WCS”生成新的坐标系,可以方便地实现新参考系的建立。
3)本文第1.3节中,在“插入/扫掠/扫掠”命令对话框的“截面选项”中定位方法必须选择“矢量方向”选项,否则不能生成所需要的齿槽切割效果。
4)建模时必须先抽取特征,否则不能完成布尔运算。
5)重新编辑“螺旋线”的旋转方向,就可以改变齿轮旋向。
4 结 语
UG系统功能强大,在零件设计及现代化加工制造中得到业内设计人员的一致认同。笔者借鉴了前人运用UG软件进行参数化设计的诸多经验,以UG-NX6为平台完成了斜齿轮的参数化建模,总结并提出了其中的难点问题及解决方法。
[1] 文立阁,侯洪生,张秀芝.利用UG对渐开线斜齿圆柱齿轮参数化设计[J].现代制造工程(Modern Manufacturing Engineering),2009(1):33-35.
[2] 文立阁,李建桥,张春华.基于UG的圆柱直齿轮参数化设计[J].制造技术与机床(Manufacturing Technology and Machine Tool),2008(3):46-48.
[3] 赵向前,徐洪涛.基于 UG4.0的斜齿圆柱齿轮的三维精确参数化建模[J].金属加工(Machinist Metal Cutting),2008(2):73-74.
[4] 刘顺芳,曹慧琴,董金华.基于Pro/E参数化技术的三维建模方法[J].河北科技大学学报(Journal of Hebei University of Science and Technology),2011,32(1):57-59.
[5] 王学永.斜齿圆柱齿轮传动的模糊可靠优化设计[J].河北科技大学学报(Journal of Hebei University of Science and Technology),2005,26(4):299-302.
Parameterized design of cylindrical involute helical gear by using UG-NX6
LI Hai-tao1,CAI Jian-jun2
(1.Department of Mechanical Engineering,Hebei Institute of Mechanical and Electrical Technology,Xingtai Hebei 054048,China;2.College of Mechanical and Electronic Engineering,Hebei University of Science and Technology,Shijiazhuang Hebei 050018,China)
Cylindrical involute helical gear has complex tooth profile,so it is difficult to conduct parameterized design.3Dsoftware UG-NX6is introduced to conduct 3Dmodeling for cylindrical involute helical gear.By this modeling method,the figure of corresponding cylindrical involute helical gear can be obtained immediately after changing the parameters.The method provides a reference for parameterized design of other bodies with complex surface profile.
parameterized design;cylindrical involute helical gear;UG-NX6
TH132.41
A
1008-1542(2011)04-0330-03
2011-03-05;
2011-04-18;责任编辑:冯 民
李海涛(1977-),男,河北定州人,讲师,硕士,主要从事机械制造及其自动化方面的研究。
