两种坐标系转换计算方法的比较*
2011-09-20潘国荣周跃寅
潘国荣 周跃寅
(1)同济大学测量与国土信息工程系,上海200092) 2)现代工程测量国家测绘局重点实验室,上海200092
两种坐标系转换计算方法的比较*
潘国荣1,2)周跃寅1)
(
1)同济大学测量与国土信息工程系,上海200092) 2)现代工程测量国家测绘局重点实验室,上海200092
出于对目前常用的两种坐标系转换模型的学习和理解,对原本适合于小角度坐标转换的布尔莎模型进行了拓展,使其适合于任意角度坐标转换。将改进后的7参数布尔莎模型与13参数的大角度模型,结合盾构三棱镜法解算盾首盾尾坐标的工程实例,通过大旋转角和小旋转角两组数据以及编程实现两者的对比,并得出了结论。
多余观测;迭代平差解算;坐标转换;盾构坐标;布尔莎模型
Abstract For the purpose of the research on the two current main methods of coordinate transformation,I expanded the Burse transformation model which was only fit for narrow angle to fit any angle transformation.Improved Burse transformation model of 7 parameters and 13 parameters transformation model are studied.Associating an example of the shield calculating the coordinate by the mean of three prism calculation,We did the comparison and drew a conclusion through the two sets of data including wide-angle data and narrow-angle data and programming.
Key words:redundant observation;iteration adjustment;coordinate transfer;coordinate of shield;Burse transformation model
1 前言
坐标系转换在测量科学中是普遍存在的需求,无论是摄影测量的像空间坐标系到设站坐标系的转化,还是GPS解算基线换算到独立坐标系,或者在盾构自动导向中三棱镜法解算盾首盾尾坐标中都需要用到坐标系转换。目前,关于坐标转换理论大致可分为7参数的模型[1,2]与13参数模型[3],本文将分析比较这两种模型使用过程中的区别与特点,并通过编程加以实现对比。
2 数学模型
空间中同一点在两个坐标系中具有两套不同的坐标值(图1)。假如现有n个点,其在两个坐标系中的三维坐标值已知,在o-xyz中的坐标为(xiyizi)T,在0'-x'y'z'中的坐标为(x'i)T(i=1,2,…,n)。

图1 两个不同坐标系Fig.1Two different coordinate systems
2.1 七参数模型
在七参数模型中,公共点之间的关系表示为:
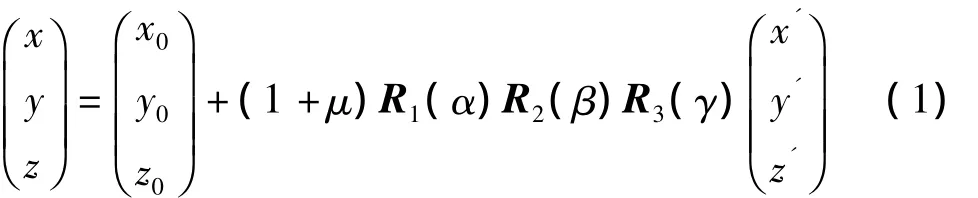
式中,(xyz)T为两坐标系间的平移量,R(α)R00012(β)R3(γ)为3个旋转矩阵的乘积,分别绕X轴旋转α,绕Y轴旋转β,绕Z轴旋转γ,μ为尺度参数,定义0'-x'y'z'为起始坐标系,0-xyz为目标坐标系,其中:
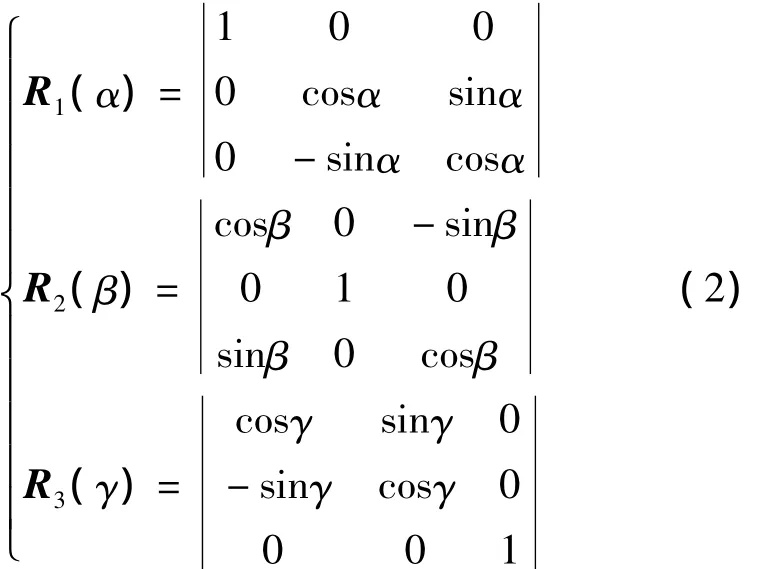
需要特别指出的是:由于布尔莎模型对式(2)中的三角函数作了近似处理,所以在应用上受到了限制,只能适合于小角度的坐标转换。
本文对式(2)不作近似处理,而在构成误差方程进行平差解算时,采取对式(1)在参数近似值处泰勒展开进行线性化,如下:
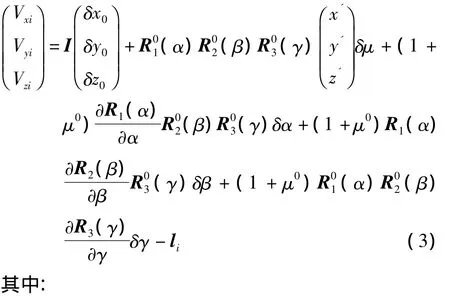
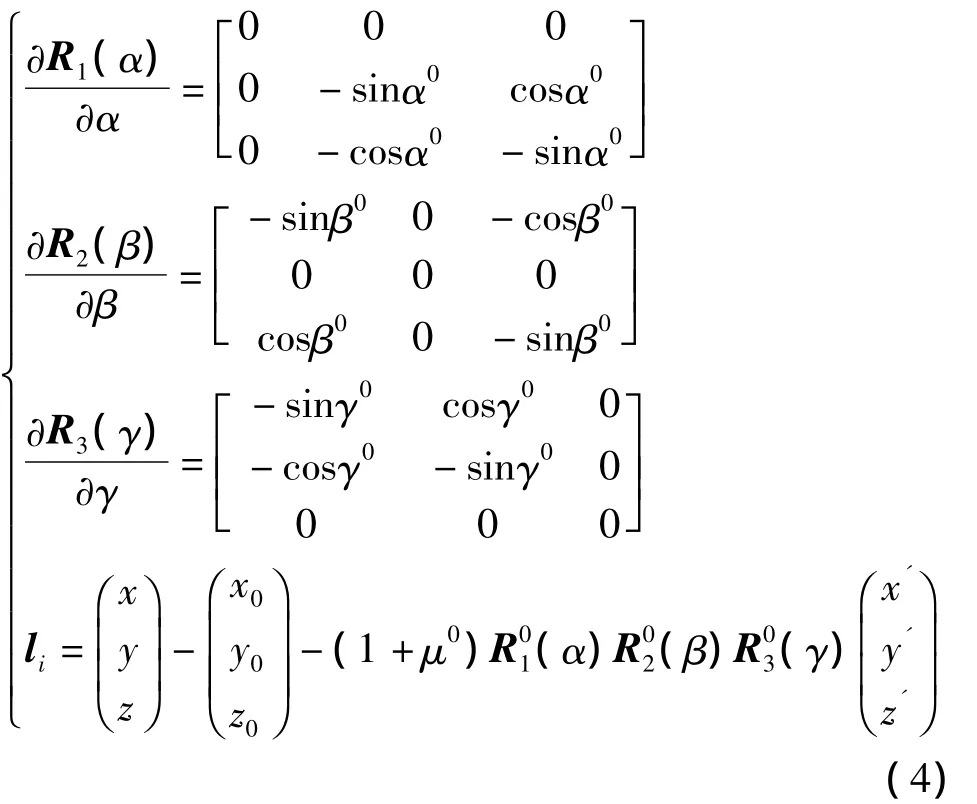
将每次计算出的参数改正值(δx δy δz δμ δα δβ δγ)T加上上次计算时的参数近似值x0、y0、z0、μ0、α0、β0、γ0的和,作为本次参数近似值代入,第一次解算的近似值都设定为0,根据间接平差原理,

权阵P为单位阵,可以不断迭代解出新的参数改正值,直到解算出的δx、δy、δz、δμ都小于10-5而且δα、δβ、δγ都小于10-7为止。
2.2 十三参数模型
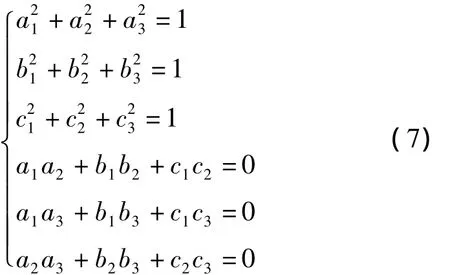
与7参数模型类似,13参数的思路是将7参数模型中R1(α)R2(β)R3(γ)3个相乘的旋转矩阵用R阵代替,R阵中包含有9个参数都设为未知参数a1、a2、a3、b1、b2、b3、c1、c2、c3,再加上一个尺度参数μ和3个平移参数x0、y0、z0一共是13个参数。
但是我们知道R阵是由R1(α)R2(β)R3(γ)3个矩阵相乘得来的,其中仅有3个参数是互相独立的,现在设定了9个参数,则必定有6个条件方程来约束其余的6个非独立参数。由于此R阵为正交矩阵,则必定存在如下条件:
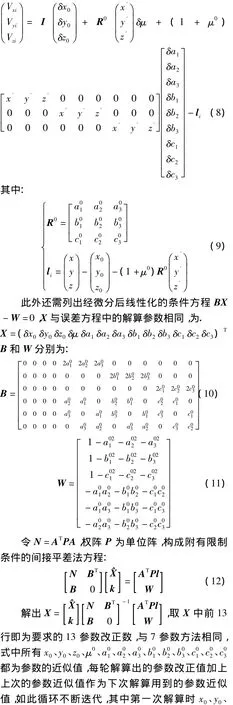
因此可以用附有条件的间接平差法来解算,仍然需要通过求微分将误差方程线性化:
3 工程实验
在地下工程自动导向理论中,尤其是地铁盾构的精密定位,通常采取3棱镜方法[4],即在盾构未开挖之前,用得到的3个棱镜的标定坐标,解算出开挖过程中盾首盾尾的坐标,并根据设计位置得出其偏差量。
为对比两种坐标系转换效果,分别以两坐标系间大旋转角和小旋转角为区别采集了两组数据,每组数据都采用3个公共点,7参数模型中,观测方程n=9,未知参数t=7,多余观测数r=2;13参数模型中,误差方程+条件方程一共有15个方程,未知参数为13个,则多余观测数r仍为2。
以上海某条在建地铁盾构项目数据为例进行分析。两组棱镜的坐标位置如图2所示。3个棱镜在起始坐标系和目标坐标系中的坐标值分别为表1与表2所示。
图2 采集数据大致位置Fig.2Approximate location of collected data
经过编程解算,结果显示:7参数模型和13参数模型解算出的平移参数和尺度参数在10-6级以上,分别解算出的R阵9个元素间在10-10级上都完全相同,即在指定限差内,小角度坐标系转换和大角度坐标系转换迭代解算出的转换参数几乎完全一致,单位权中误差的解算按σ0=计算。以下是小角度坐标系转换参数和大角度转换参数结果,由于两种模型解算出的结果完全一样,因此只列出一个结果(表3及表4)。
由于所采集的数据来自盾构施工线路上的两个不同的位置,行进路线基本是在XOY平面上绕Z轴

表1 小角度坐标系转换的坐标值(单位:m)Tab.1Coordinates of coordinate transfer in narrow angle(unit:m)

表2 大角度坐标系转换的坐标值(单位:m)Tab.2Coordinates of coordinate transfer in wide angle(unit:m)

表3 转换参数解算结果Tab.3Results of transfer parameter solution

表4 两坐标系间的旋转角度Tab.4Rotation angle between two coordinate systems
旋转,所以绕X轴和Y轴旋转的角度很小且接近,而区别则主要体现在绕Z轴的旋转角度γ上。旋转角度也可以从R阵看出,若旋转角度都很小,则旋转阵R趋向于单位阵,即对角线上的元素趋向于1,其余元素趋向于零。以X轴旋转角α为例,当旋转角度α-sin α<ε,ε为某一限差小量,即满足在允许ε限差下有sinα≈α,cosα≈1,再由公式(2)中的3个旋转矩阵连乘得到:
R=R1(α)R2(β)R3(γ)=
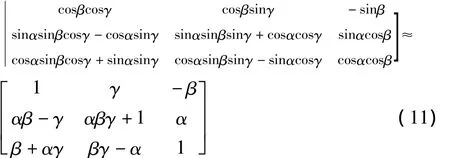
γ=0.000 208 545 7<0.000 5,则可用布尔莎模型解算,表5列出了小角度中,利用7参数模型、13参数模型与布尔莎模型解算出的参数,从起始坐标系到目标坐标系进行坐标转换的结果。
如果允许α与sinα之差在0.000 5弧度以内认为是相同的,则可利用式(13)中约等号右端的近似R阵列立误差方程,这便是布尔莎模型的思路,可看作是满足特定条件下的简化方程,本例小角度数据中的最大角γ满足γ-sin

表5 利用解出的参数进行坐标转化结果(单位:m)Tab.5Results from coordinate transfer by using calculated parameters(unit:m)
从表5可见,解算出的参数完全相同,仅迭代次数略有差别(表6)。
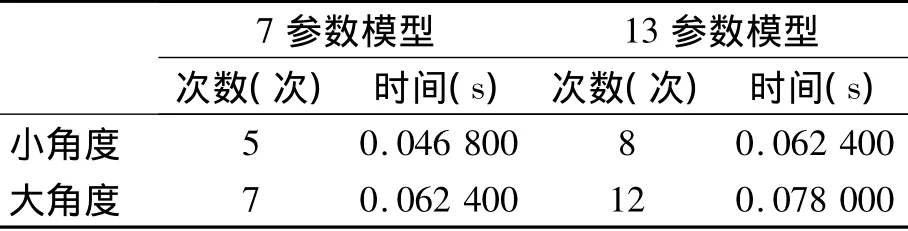
表6 两种模型的迭代次数Tab.6Iteration times with the two models
若采用相同的数据,在迭代收敛之前,迭代相同次数时7参数与13参数解算的结果如表7和表8所示。
可见,7参数模型在相同条件下能更快趋近最终结果。需要注意的是,如果迭代解算的初始值不同,会导致解算出的参数不一致(主要影响尺度参数和旋转参数),例如之前解算出的μ和R在改变迭代初值后,会得到一组新的μ'和R',这些解算出的角度参数和尺度参数会同时不同,但都会在坐标转换最终结果不变的大前提下相互间自适应而同时改变。例如,会在改变迭代初值时出现新解出的μ'满足1+μ'=-(1+μ),并且R'=-R,而平移参数却不会改变。可以看出,利用新的解算参数,从起始坐标系下的坐标推算到目标坐标系下的坐标,其结果是与利用之前的解算参数计算结果完全相同。

表7 小角度两种模型迭代4次时的解算结果Tab.7Results from the iteration 4 times in narrow angle with two models

表8 大角度两种模型迭代6次时的解算结果Tab.8Results from the iteration 6 times in wide angle with two models
4 结论
两种参数模型解算过程中迭代次数不同的原因,主要是由于7参数模型是用多余两个方程平差解算7个参数,而13参数模型同样是利用多余两个方程却平差解算13个参数,多余观测数所占总的方程比例7参数模型比13参数模型占优。
总体来说,无论是7参数模型还是13参数模型,都可以解决任意角度坐标系转换的问题,7参数模型参数少,但线性方程不好列;13参数模型线性方程比较容易列出,但参数过多,计算时内存占用更大,不如7参数效率高。
1王解先,季凯敏.工业测量拟合[M].北京:测绘出版社,2008.(Wang Jiexian and Ji Kaimin.Industrial surveying fitting[M].Beijing:Surveying and Mapping Press,2008)
2张宏.布尔莎-沃尔夫转换模型的几何证明[J].测绘与空间地理信息,2006,29(2):46-47.(Zhang Hong.To prove Burse-Wolf conversion model with simple formula[J].Geomatics&Spatial Information Technology,2006,29 (2):46-47)
3陈义,沈云中,刘大杰.适用于大旋转角的三维基准转换的一种简便模型[J].武汉大学学报(信息科学版),2004,29(12):1 101-1 105.(Chen Yi,Shen Yunzhong and Liu Dajie.A simplified model of three dimensional-datum transformation adapted to big rotation angle[J].Geomatics and Information Science of Wuhan University,2004,29 (12):1 101-1 105)
4潘国荣,周莹,张德海.坐标转换模型在盾构姿态计算中的应用[J].大地测量与地球动力学,2006,(3):84-87.(Pan Guorong,Zhou Ying and Zhang Dehai.3D datum transformation model for determining orientation of shield in subway construction[J].Journal of Geodesy and Geodynamics,2006,(3):84-87)
COMPARISON BETWEEN TWO WAYS OF CALCULATION OF COORDINATE TRANSFER
Pan Guorong1,2)and Zhou Yueyin1)(
1)Department of Surveying and Geo-informatics,Tongji University,Shanghai200092) 2)Key Laboratory of Modern Engineering Surveying,SBSM,Shanghai 200092
P226+.3
A
1671-5942(2011)03-0058-05
2011-02-26
国家自然科学基金(40674010);“十一五”科技支撑项目(2006BAC01B02-02-02,05)
潘国荣,男,1960年生,教授,博士生导师,主要研究方向为精密工程测量、工业测量与测量数据处理.E-mail:pgr2@163.com
