三自由度气浮台推力分配算法设计
2011-09-03孙兆伟邬树楠兰盛昌
叶 东,孙兆伟,邬树楠,兰盛昌
(哈尔滨工业大学卫星技术研究所,150080哈尔滨,yedong1224@gmail.com)
分布式卫星系统是由物理上互不相连的、共同实现同一空间任务的多颗卫星构成的空间系统,是21世纪空间技术发展的新趋势[1-2],在分布式雷达、导航定位、三维气象观测、电子侦察、移动通信、多点同步测量、分工工作卫星甚至空间对抗和空间控制等领域发挥巨大的作用[3].分布式卫星系统通常由多颗卫星按编队飞行方式组成,系统中各颗卫星通过星间链路实现信息共享,并通过一定的协同策略,在整个编队内进行共同的导航和控制,实现整体的协同控制,相互协作完成任务.
卫星高投入、高效益、高风险的特殊性,决定了卫星从可行性论证到正样设计的研制过程中必然要经历各种类型的仿真试验,其中控制系统的半物理仿真验证在卫星研制过程中起着重要的作用[4-8].
鉴于目前国内对于分布式卫星的研制还处于理论研究阶段,故很有必要搭建分布式卫星地面仿真系统.但是三自由度气浮台的平移和转动是相互耦合的,且喷嘴是有冗余的.针对卫星姿态控制时执行机构存在冗余的情况,可以实现在某个优化准则或约束下优化分配,提高系统对执行机构故障的容错能力[9-11],但是它和半物理仿真的区别在于它没有耦合,且没有考虑计算效率.本文针对这些问题提出了三自由度气浮台的推力分配算法.
1 分布式卫星半物理仿真系统组成
分布式卫星地面仿真系统如图1所示,总体结构由以下几部分组成:
1)基础平台单元.包括1个抛光铸铁平台,主要作用是承载气浮台,并要求足够光滑使其能够与气浮台的气足形成气垫;
2)三自由度气浮台系统.包括2个三自由度气浮台(2个平移自由度和1个转动自由度).每个气浮台配置了用于提供力矩的8个喷嘴、提供气浮力的气足、测量角速度的光纤陀螺、通讯用蓝牙和仿真计算所用的xPC仿真计算机;
3)相机定位系统.包括安装在平台上端的宽视场CMOS相机和视觉处理计算机,用于实现各气浮台初始位置及角度的标定,并且能够确定任意时刻气浮台的位置及角度信息;
4)地面控制单元.主要由地面控制台、数据库系统、曲线显示终端和动画显示终端组成,主要完成用户和气浮台上的xPC仿真计算机之间的数据交换与控制工作,记录仿真中的数据并使仿真数据能直观、形象地实时动态显示;
5)CAN总线.主要完成各个硬件与xPC之间数据的快速通讯.
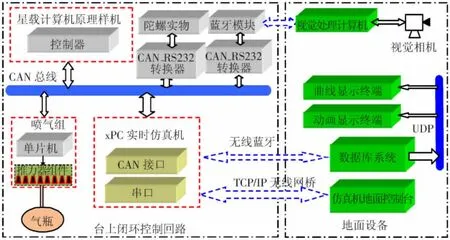
图1 三自由度气浮台系统总体结构
2 分布式卫星半物理仿真控制策略
放在平台上的气浮台具有三个自由度(x,y,ψ).它们由安装在三自由度气浮台上的喷嘴提供力和力矩进行控制,喷嘴安装的方式如图2所示.每个喷嘴的标称力矩是相同的,为250 mN.8个喷嘴对称安装,提供三自由度气浮台在平台上做水平移动和转动所需要的力和力矩.由于喷嘴所产生的力和力矩是耦合的,并且这些喷嘴是有冗余的,加剧了喷嘴推力分配的难度.
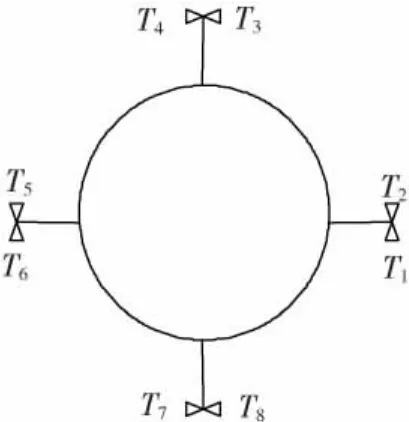
图2 喷嘴的安装示意
三自由度气浮台的控制策略如图3所示.控制系统根据系统状态和期望状态给出控制所需要的期望力向量,在本文用简单的PD控制.而推力分配的任务就是要在每个控制周期内将控制系统所产生的期望力向量Fdes=[FxdesFydesTψdes]转化成8个喷嘴的开关向量T=[T1T2…T8].由于从系统状态到转台的喷嘴开关是个非线性控制的过程,在这里将控制策略划分成控制器和推力分配2部分,使得控制器和推力分配可以单独设计,降低了设计的难度.
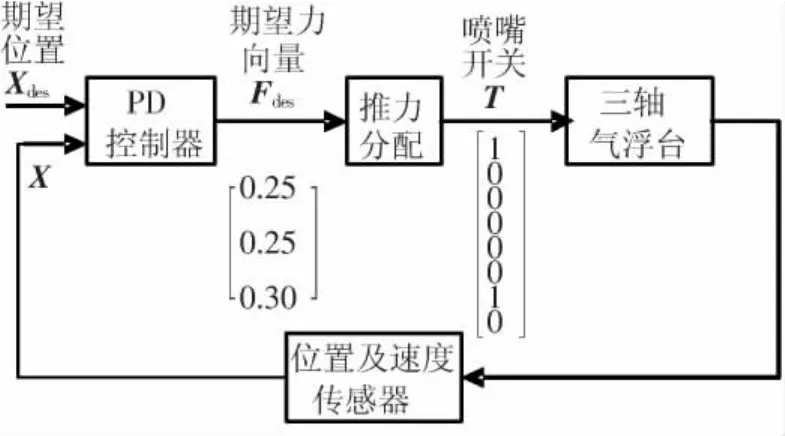
图3 三自由度气浮台的控制策略
3 推力分配
因为每个喷嘴只能输出最大的标称力,不能输出控制需要的变幅值的力矩.本文提出的思路是:在每个仿真周期中,从喷嘴所能产生的力向量中,找出与期望力向量最相近的喷嘴开关.具体实现方式为首先提出1个目标函数,然后通过穷举搜索法找出能使目标函数最小的喷嘴开关T.
3.1 目标函数
选择喷嘴开关需要1个提供选择的目标函数.此目标函数不仅要可以表示期望力向量和喷嘴产生的合力之间的偏差,而且要能统计喷气的消耗量.根据这个要求,设计如下目标函数:

其中:J表示推力分配的目标函数;i表示喷嘴的序号;Fxerr(T)=Fxdes-Fxact(T)表示期望力和喷嘴所产生的合力在x轴方向的偏差;Fyerr(T)=Fydes-Fyact(T)表示期望力和喷嘴所产生的合力在 y轴方向的偏差;Tψerr(T)=Tψdes- Tψact(T)表示期望力矩和喷嘴所产生的力矩的偏差;Fxnorm、Fynorm和Tψnorm分别表示Fx、Fy和Tψ的归一化因子;αgas表示喷气消耗的权重.这里J主要有2部分组成,前3项表示期望力向量和实际由喷嘴产生合力之间的偏差,最后1项表示打开喷嘴的数量,等效于在1个仿真周期内消耗的气体.
如果此三自由度气浮台装配了可变力的喷嘴,则可以通过选择喷嘴开关使J达到零.由于目前所采用的喷嘴只能实现开关控制,所以在1个仿真周期内,只能通过选择能使目标函数最小的喷嘴开关.
在本文中,Fx、Fy和Tψ的归一化因子都使用喷嘴所产生的标称力或力矩.αgas越大表示喷嘴消耗的权重就越大,为平衡起见,在本文中取为0.5;由于8个喷嘴的所有喷嘴开关有28=256种情况,在每个仿真周期计算所有喷嘴开关T的目标函数,计算量非常大,但是控制精度的提高在一定程度上也要求较小的仿真周期.为解决这个矛盾问题,本文根据喷嘴所产生力向量的对称性原则优化搜索的范围,以减少在每个仿真周期的计算量.
3.2 优化搜索范围
三自由度气浮台上共有8个标称力相同的喷嘴,共有28=256种开关方案.一对反向的喷嘴(如:T1和T2)同时作用时不会对转台产生力作用.去掉这种没有使用意思的组合,这8个喷嘴[T1T2…T8]可以考虑成4个喷嘴组合[R1R2R3R4].这里R1表示由T1和T2所产生力的作用,有只打开T1、只打开T2和都不打开这3种开关方案.这样喷嘴的开关方案就有34=81种,即可用4个3选1代替8个2选1的喷嘴开关方案.
下一个简化思路是基于由喷嘴产生的力向量存在冗余,即有些不同的喷嘴开关方案产生了相同的力向量,如T2与T3同时打开和T5与T8同时打开时产生的力向量是相同的.通过减去这种冗余的开关方案,喷嘴的开关方案剩下了65种,这些开关方案所对应的力向量如图4所示.

图4 8个喷嘴可产生的力向量
图4中的数值为单位化以后的数值,其中每个点表示可以产生的力向量F=[FxFyTψ].比较直接的推力分配方法就是在每个实时仿真周期内计算哪个F与期望力矩最接近,这样在1个仿真周期内要计算目标函数65次,这个计算量对于实时仿真来说有相当的难度.
接着通过由65个喷嘴开关方案所产生力向量的对称性来减少实时仿真中计算目标函数的次数.由图4可看出,这65个点是相对于x-y面,x-ψ面和y-ψ面对称的,可以只考虑在第一卦限的16个搜索点.并且由于在第一卦限中有5对点是关于x=y轴对称的,最终需要计算目标函数的搜索点减少到11个,它们所对应的单位化后力向量如图5所示.11个点搜索时的计算量是实时仿真器所能接受的.

图5 对称简化后的候选F
3.3 力矩分配
在每个仿真周期中,首先将这11个点代入到目标函数中,取使目标函数取到最小值的点为目标值.再将这个目标值通过前述对称映射的反映射得到喷嘴开关T.
由于喷嘴对三自由度气浮台有力和力矩的耦合作用,在做反映射的时候要考虑这种影响.下面将反映射的算法陈述如下:
1)x=y面反映射.将喷嘴开关T的数据向后移2位,并将溢出的数据拿到第一位,即喷嘴1为以前喷嘴8的开关状态,嘴2为以前喷嘴7的开关状态,嘴3为以前喷嘴1的开关状态等等.
2)x-ψ面反映射(y向的坐标符号发生了改变).反映射需要考虑只改变对y向力的影响,不能改变对气浮台的力矩作用.如果喷嘴4开且喷嘴8关,则调整成喷嘴4关且喷嘴8开;如果喷嘴7开且喷嘴3关,则调整成喷嘴7关且喷嘴3开.
3)y-ψ面反映射(x向的坐标符号发生了改变).反映射需要考虑只改变对x向力的影响,不能改变对气浮台的力矩作用.如果喷嘴1开且喷嘴5关,则调整成喷嘴1关且喷嘴5开;如果喷嘴6开且喷嘴2关,则调整成喷嘴6关且喷嘴2开.
4)x-y面反映射(力矩的坐标符号发生了改变).如果喷嘴1与喷嘴5同时开,那么将它们调整成关,并且将喷嘴2与喷嘴6调整成开;同样,如果喷嘴3与喷嘴7同时开,那么将它们调整成关,并且将喷嘴4与喷嘴8调整成开.
经过上述的反映射,可以得到每个周期喷嘴的输出T.
4 数学仿真及结果分析
分布式卫星的半物理仿真中最基本也是最关键的运动是三自由度气浮台能到达指定的位置.本文中三自由度气浮台的位置(x,y)从(0,0)机动到(1,1)m为控制目标.初始的速度和角速度都为0;每个喷嘴加了最大10%的力偏差.
控制算法采用如下的PD控制:
其中:xerr和Vxerr表示x方向的位移和速度偏差;yerr和Vyerr表示y方向的位移和速度偏差;Vψ表示角速度偏差.Px、Dx、Py、Dy和 Dψ为控制参数,这里分别选择为 4.2、51.2、4.2、51.8 和 17.仿真结果如图6~9所示.

图6 位移和角度的仿真结果

图7 气浮台位置的相位
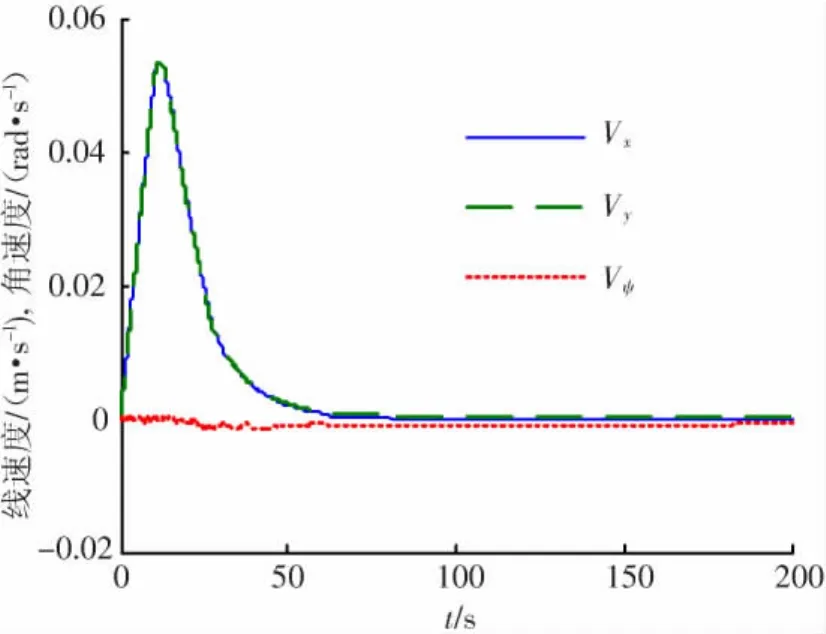
图8 线速度和角速度的仿真结果
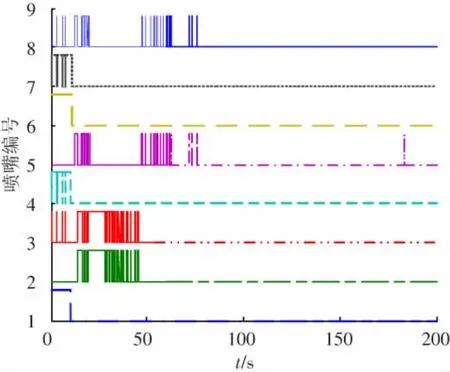
图9 喷嘴的输出
从仿真结果可以看出,三自由度气浮台在65 s到达了预定的目标位置,且位置及角度能够稳定在目标位置.系统能够实现较好的控制性能,达到总体仿真的目的,下一步可以将其应用到实际的半物理仿真中.
5 结论
1)本文针对平移和转动相互耦合的喷嘴推力分配的问题建立目标函数,并利用对称性原则,建立了切实可行的推力分配算法;数学仿真结果也验证其有效性,可应用到实际的半物理仿真中.
2)采用对称性原则大大减小了每个仿真周期的计算量,使其不约束仿真周期的减小.仿真周期减小,提高喷嘴的开关频率(由于采用开关控制喷嘴),提高了控制精度.
[1]CHRISTOPHER K,MICHAEL S.Autonomous operations experiments for the distributed emerald nanosatellite mission[C]//14th Annual AIAA/USU Conference on Small.Logan Utah:Utah State University,2000,SSC00-IX-5.
[2]王兆魁.分布式卫星动力学建模与控制研究[D].湖南:国防科技大学,2006.
[3]BARNHART D A,HUNTER R C,WESTON A R,et al.XSS-10 Miero-satellite demostration[C]//American Institute of Aeronautics and Astronautics-98-5298.Reston:AIAA,1998:339-346.
[4]杨正贤,孔宪仁,王继河,等.基于xPC的小卫星半物理仿真验证平台[J].系统仿真学报,2009,21(20):6444-6448.
[5]王继河,王峰,兰盛昌,等.基于微型核的双星编队实时仿真系统[J].系统仿真学报,2008,20(2):328-331.
[6]原劲鹏,杨涤,翟坤,等.某型大柔性多体结构卫星半实物仿真[J].系统仿真学报,2006,18(5):1204-1207,1259.
[7]WATKINS R,AGRAWAL B,SHIN Y,et al.Jitter control of space and airborne laser beams[C]//22nd AIAA International Communications Satellite Systems Conference andExhibit 2004(ICSSC).Reston:AIAA,2004,5:9-12.
[8]YANG Y,CAO X.Design and development of the small satellite attitude control system simulator[C]//AIAA Modeling and Simulation Technologies Conference and Exhibit,2006.Reston:AIAA,2006,8:21 -24.
[9]唐生勇,张世杰.交互对接航天器推力分配算法研究[J].宇航学报,2008,29(4):1120-1125.
[10]MARTEL F.Optimal simultaneous 6-axis command of a space vehicle with a precomputed thruster selection catalogue table[C]//AAS/AIAA Astrodynamics Specialist Conference.Montana USA:[s.n.],2003,AAS 03 -587.
[11]JIN J,PARK B,PARK Y,et al.Attitude control of a satellite with redundant thrusters[J].Aerospace Science and Technology,2006,10(7):644 -651.