双频地波雷达分区混合式融合跟踪方法
2011-09-03周共健于长军权太范崔乃刚李永光
周共健,于长军,权太范,崔乃刚,李永光
(1.哈尔滨工业大学 电子工程技术研究所,150001哈尔滨,zhougj@hit.edu.cn;2.哈尔滨工业大学 航天工程系,150001哈尔滨;3.中国电子科技集团第29研究所,610036成都)
高频地波雷达海面回波伴随着强电离层杂波[1]、强海杂波[2]等干扰,高频波段目标的散射特性处于瑞利区和谐振区,目标散射面积起伏较大,是严重影响高频地波雷达系统性能的主要因素.由于海杂波、电离层杂波特性以及目标散射面积均与雷达工作频率紧密相关,因此采用双频探测,即同时发射2个频率的信号,可以削弱以上因素的影响,从而改善高频地波雷达的系统性能[3].双频工作模式对于目标跟踪来讲,有利于提高航迹形成与维持能力,改善跟踪精度.另一方面,也给目标跟踪带来了新的挑战,需要结合高频地波雷达的特点,合理设计双频融合跟踪系统,以发挥双频探测的融合优势.
高频地波雷达的探测信息具有以下特殊性:1)电离层杂波显著的时变特征[1]以及高频波段的目标回波起伏特征导致高频地波雷达探测性能随时间变化显著;2)受电离层杂波以及电波传播衰减的影响,高频地波雷达探测性能呈现出明显的区域差异,远端目标检测困难,而近端目标密集;3)海杂波、电离层杂波及工业干扰等易造成目标检测出现大量的虚警.这些给实现稳定可靠的目标跟踪带来极大的困难,是信息融合优化设计不得不考虑的一个复杂的问题.结合以上特点,本文提出威力范围分区混合式融合跟踪方法,远区采用点迹融合,近区进行单频跟踪,最后对2部分处理输出的航迹进行航迹融合.
1 分区混合式融合框架
目前常用的信息融合结构模型有分布式融合和集中式融合2种,根据通信传递和融合处理的对象,二者又分别称为航迹融合与点迹融合[4-5].通常实际信息融合系统均尽量采用算法简单可靠、计算通信负荷较小的航迹融合,而地波雷达探测性能的强不确定性[6-7]以及强时变特征,迫使信息融合不得不考虑点迹融合,以使系统性能达到最优,但同时又要面对点迹融合中目标批次过多和杂波密度过大带来的数据关联风险和计算负荷.
考虑到高频地波雷达探测性能具有明显的区域差异特性,在远区(约200 km以外)需要尽可能地发现目标,对于不确定性和时变特性更明显的信息,需要采用集中式融合才能充分发挥融合的优势;在近区,单频探测的性能检测概率与稳定性尚可,但目标与杂波更密集,采用航迹融合正好适应这种情况.为此,本文提出一种威力范围分区混合式融合跟踪方法,如图1所示,输入的双频点迹数据首先进行点迹分区,远区点迹用来进行点迹融合,近区点迹则进行单频跟踪,最后对这两部分处理的航迹进行航迹融合,形成统一的系统航迹信息.
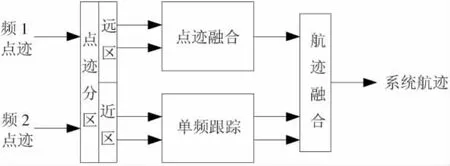
图1 分区混合式融合跟踪系统
分区混合式融合跟踪系统中,如何分区是关键.简单的方法是按照图2中硬分区法进行,将探测范围按距离分为彼此独立的近区和远区2个区域,点迹融合与单频跟踪对各自的观测集合进行处理,这种分区方案存在以下缺陷:
1)远区航迹只能关联远区的点迹,近区航迹只能关联近区点迹,这将导致靠近或跨越分界线的目标丢失关联;
2)各区的点迹只能参与本区域暂时航迹的关联,从而导致在分界线附近新出现的目标不能及时被发现;
3)本该被航迹关联而没被关联的点迹,有可能形成新的航迹,导致分界线附近假航迹的出现.

图2 硬分区示意
为了避免这种因分区而导致的“边界效应”,本文采用图3所示的软分区法.远区与近区之间没有明确的分界线,而是在设想的分界线附近有一定的交叉区域,交叉区域内的点迹既进行点迹融合又参与单频跟踪.这样对于穿越或沿着分界线运动的目标不至于丢失或漏警;而目标的点迹都会被对应航迹关联也不会导致多余航迹的出现.交叉过渡带的跨度不应过大,因为交叉区域的数据要经过多次处理,这会增加系统的运算量和复杂性,另外交叉区域过大则会削弱分区融合的意义.

图3 软分区示意
2 融合算法
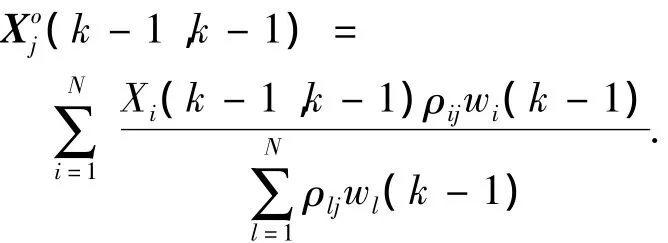
高频地波雷达的观测值在极坐标系获得,包括径向距离、方位角和径向速度;目标运动模型通常在直角坐标系中建立;目标状态与雷达观测之间是一种非线性的关系.针对这种非线性跟踪,采用转换量测交互式多模型卡尔曼滤波器进行航迹滤波.交互式多模型(IMM)卡尔曼滤波使用多个目标运动模型并行工作,每个模型的状态估计按一定的概率加权来实现对机动目标的跟踪[8].假设有N个相互作用的子滤波器或者子模型,模型之间的转换由过渡概率ρij表征的马尔可夫链控制,ρij在计算开始时选取.这种算法可分为4步,即相互作用、滤波、模型概率计算以及联合估计.
子滤波器模型Mj在k-1时刻的混合状态估值由模型Mi的输出Xi(k-1,k-1)、相应的模型概率wi(n)以及过渡概率ρij来计算,即
在k-1时刻,子滤波器模型Mj的状态误差协方差阵为
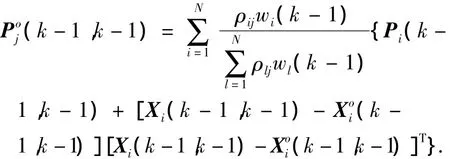
其中Pi(k-1,k-1)为时刻k-1第i个子滤波器的协方差估值.每个子滤波器的状态修正按标准卡尔曼滤波方程计算.
子模型Mj的似然值由残差vj和协方差更新量Bj计算,即
其中m为量测向量的维数.
模型概率wj(k)由贝叶斯定理给出

其中ρ(z(k)|zk-1)是归一化常数,它确保所有子模型概率之和等于1.
将所有子模型的状态估计加权合并得到最终的状态输出:
同时,估计协方差阵为
数据关联是建立传感器当前测量数据和以前其它测量数据的关系,以确定它们是否具有1个公共源的处理过程[9].为了解决高频地波雷达特殊的数据关联问题,并且要考虑工程实用适当控制计算量,选择一种多目标、硬判决、单步跟踪的数据关联算法,即最近邻简易联合概率数据关联(NNCJPDA).
令某一周期需要进行关联的观测集合和航迹集合分别为 Z={z1,z2,…,zm}和 T={t1,t2,…,tn}.数据关联过程中,每条航迹用tj=(j,Sj)表示,其中j为预测观测值,Sj为预测误差协方差.数据关联过程需要确定一种组合关系A⊆{1,2,…,m}× {1,2,…,n},其中:
1)每个观测至多只能分配给1条航迹;
2)每条航迹至多只能关联1个观测.
令观测z的高斯概率密度函数为

关联波门为

目标观测落入波门的概率为
其中γ由χ2分布表查得.

NNCJPDA算法步骤如下.
1)对每一种可能点迹 -航迹对(i,j)∈{1,2,…,m}× {1,2,…,n},计算观测 zi与航迹 tj关联的概率为
其中γ>0、b>0,为可调参数.
2)设定初值L={(i,j):βij> 0}和A= Ø;3)重复以下步骤,直到L成为空集:
需要指出的是,以上算法执行完毕以后,对于某条航迹tj有可能没有关联到任何观测,对于某个观测zi也有可能没有被分配给任何航迹.那些未被关联的观测则可以继续与优先级较低的航迹进行关联或用来进行航迹起始.
分区混合式融合跟踪不仅要实现远区的点迹融合,还要进行近区的航迹融合.数据关联能够识别来自同一目标的历史的或多传感器的信息.对于来自同一目标的历史的信息(一般为观测),用去偏转换测量卡尔曼滤波器对其进行处理,给出目标的状态估计;来自同一目标的多传感器的信息(包括观测或状态),使用简单加权融合算法,将它们合并以获得精度更高的观测或状态信息.
设参加融合的信息由n个传感器提供,Xi为第i个传感器获得的目标信息,Wi为相应传感器的归一化权值,则融合目标信息X表示为
根据融合以后的目标信息均方根误差最小的原则,确定各传感器的融合权值.设第i个传感器目标信息误差的协方差为Pi,那么第i个传感器的融合权值为
其中P为融合误差协方差

这种融合算法计算简单,易于实现.当各传感器目标信息互协方差为零时,该算法是最佳的.既可以用于传感器目标观测融合,又可以用于传感器航迹状态融合.观测融合时,传感器i的协方差Pi取其观测噪声协方差;航迹融合时,则使用去偏转换测量卡尔曼滤波状态估计误差协方差即可.
3 仿真实验分析
首先设计以下指标,用以评价跟踪性能好坏[10]:1)目标正确跟踪百分比;2)单位时间虚假航迹数.目标正确跟踪百分比越高,单位时间虚假航迹数越少,表明跟踪器性能越好.定义1个二进制序列表征目标的跟踪状态,如果某个周期有1条航迹在目标真实位置附近允许误差范围之内,则该序列对应位置为1;否则,对应位置为0.通过对上述二进制序列进行蒙特卡洛仿真实现每个周期目标正确跟踪百分比的统计.很显然每次航迹交换,二进制序列中将出现一段0序列,这将降低目标正确跟踪百分比.另外,目标正确跟踪百分比的时间平均,将能提供目标被正确跟踪的时间分数比,从而表征航迹的连续性.
考察2种分区融合跟踪方法的效果,并比较分区混合式融合与基本融合结构及单站跟踪的性能.
分区融合跟踪的设计难点在于分界线附近目标的跟踪与融合,因此仿真时产生1个大部分时间靠近200 km分界线运动的目标.目标初始距离260 km,初始方位 -41°,航速 20 m/s,航向 90°,200 km内目标检测概率为0.85,200 km外目标检测概率为0.65,周期长210 s,仿真产生60个周期的数据,观测点迹中,除了目标观测点迹,其余均为虚假点迹,2个频率各300个点迹.
60次蒙特卡罗仿真,硬分区混合式融合跟踪与软分区混合式融合跟踪的正确跟踪百分比如图4所示.可以看出,在目标接近分界线的后30个周期里,软分区混合式融合的性能明显强于硬分区混合式融合.这验证了前面指出的硬分区带来的关联风险,而软分区则大大降低了威力范围分区带来的影响.
试验同时还进行了单频跟踪、航迹融合、点迹融合的处理,它们的跟踪性能比较如表1所示.可以看出,融合可很大程度上提高目标正确跟踪的概率.点迹融合较航迹融合假航迹数有所增加,同时也取得了更高的正确跟踪百分比.分区混合式融合综合了点迹融合与航迹融合的特点,取得了大大高于航迹融合的正确跟踪百分比,远远低于点迹融合的假航迹数.软分区法由于对分界线进行了特殊处理,正确跟踪百分比较硬分区法有了2个百分点的提高,并且假航迹数仅有极少量的增加,增加的假航迹主要是由于软分区法一定程度的扩大了进行点迹融合的区域,因此交叉区域小一点较为适宜.由此可见,对于地波雷达这样具有明显区域差异特性的信息融合问题,进行分区混合式融合将会取得很好的效果.
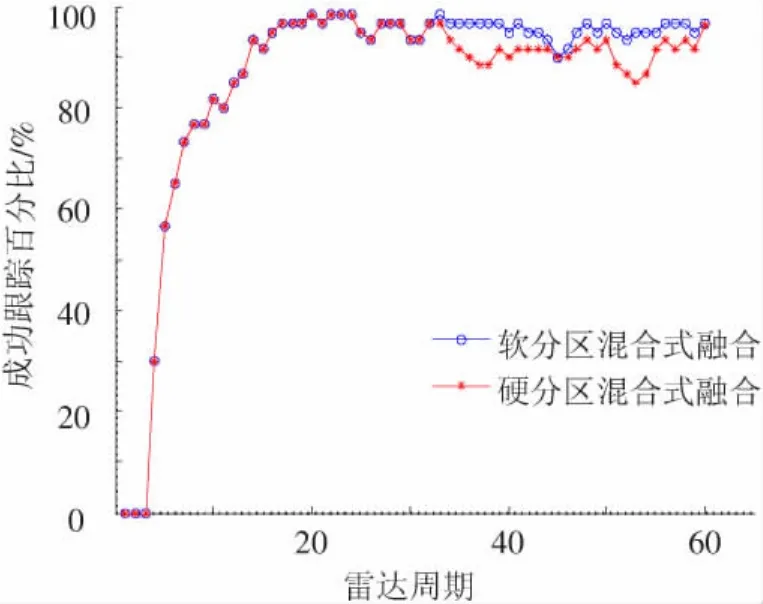
图4 目标正确跟踪百分比
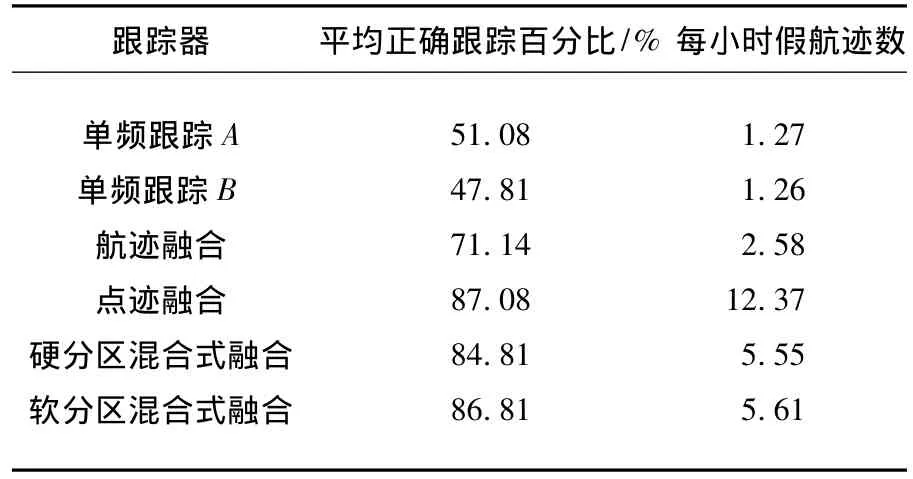
表1 各跟踪器性能比较
4 实测数据处理
利用实录的高频地波雷达双频检测点迹数据,验证本文提出的分区混合式融合跟踪方法.对实录数据进行分区混合式融合跟踪处理与单频跟踪处理,比较跟踪结果,分析融合带来的性能改善.
为了定量说明融合跟踪的优越性能,采用以下2个指标,考察目标的发现能力和目标维持能力.1)总航迹寿命;2)平均航迹寿命.表2中统计了总航迹数、总航迹寿命以及平均航迹寿命,融合跟踪在这3项指标上均要高出单频跟踪.总航迹寿命表征所有航迹发现时间的综合,直接体现目标的发现能力.取频1跟踪和频2跟踪的总航迹寿命的均值27 796为单频跟踪的总航迹寿命,那么融合跟踪的总航迹寿命较单频跟踪提高了55.17%,可见融合跟踪大大提高了目标的发现能力.
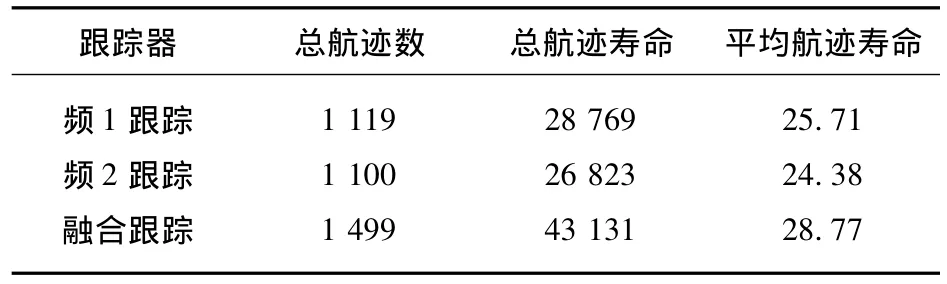
表2 实测数据跟踪处理性能比较
仅仅由总航迹寿命还不能完全表征跟踪系统的性能,还需要知道跟踪的连续性和虚警情况.表中给出的平均航迹寿命,融合跟踪的28.77较2个单频跟踪的平均值25.045高出14.87%.平均航迹寿命越高说明航迹的维持能力越强.虚假目标一般由虚假检测点迹形成,假航迹的维持能力较差,因为虚假点迹的产生比较随机,长时间得到符合目标运动规律的点迹的概率较小.因此可根据航迹的长短判断某航迹为假目标的可能性的大小.这样平均航迹寿命也可以作为虚假航迹多少的1个表征,平均航迹寿命越长,则说明短航迹较少,也就是说虚假航迹的数目可能也较小.
综上分析,双频融合给系统性能带来了明显的改善,不仅目标发现能力大大增强,而且航迹维持能力也有大幅度提升,虚假航迹出现的可能性也较小.
5 结论
影响高频地波雷达探测性能的海杂波、电离层杂波特性以及目标散射特性起伏等均与雷达工作频率紧密相关,采用双频探测融合跟踪,可大幅度改善高频地波雷达的系统性能.本文针对地波雷达探测信息的特点,提出双频探测信息的分区混合式融合跟踪方法.将探测区域分为部分交叉的远近2个区域,远区实行点迹融合,近区进行单频跟踪,最后对2部分处理航迹进行航迹融合形成系统航迹.仿真与实测数据处理结果表明,采用分区混合式融合方法,能很好的适应地波雷达的特性,取得明显优于传统融合方法的总体性能.
[1]THAYAPARAN T,MACDOUGALL J.The role of ionospheric clutter in mid-latitude and arctic regions for assessment of HFSWR surveillance[R].Ottawa,Canada:Defence Research and Development,Ottawa,Comada,2004:DRDC-TR-2004-093.
[2]ZHOU Gongjian,DONG Huachun,QUAN Taifan.HF radar sea clutter rejection by nonlinear projections[J].Journal of Systems Engineering and Electronics,2005,16(4):733-737.
[3]LEONG H,PONSFORD A.The advantage of dual-frequency operation in ship tracking by HF surface wave radar[C]//RADAR2004 Int Conf on Radar Systems.Toulouse:[s.n.],2004.
[4]BAR-SHALOM Y,LI X R.Multitarget-Multisensor Tracking:Principles and Techniques[M].Storrs,CT:YBS Publishing,1995.
[5]COVER T M,THOMAS J A.Elements of Information Theory[M].[S.l.]:Wiley,NJ,2006.
[6]权太范.目标跟踪新理论与技术[M].北京:国防工业出版社,2009:168-175.
[7]LEVENF S,ANTHONY P,CHAD H C.An integrated maritime surveillance system based on high-frequency surface-wave radars,part I:Theoretical Background and Numerical Simulations[J].IEEE Antennas and Propagation Magazine,2001,43(4),28-43.
[8]MUNIR A,ATHERTON D P.Adaptive interacting multiple model algorithm for tracking a maneuvering target[J].IEE Proc Radar,Sonar and Navigation,1995,142(1):11-17.
[9]ZHOU Gongjian,YU Changjun,ZONG Chengge,et al.Clutter-knowledge-based target tracking method in complex conditions[C]//IET International Radar Conference.Stevenage:Institute of Engineering and Technology,2009:645 -649.
[10]BENAVOLI A,CHISCI L,FARINA A,et al.Knowledge-based system for multi-target tracking in a littoral environment[J].IEEE Transactions on Aerospace and Electronic Systems,2006,42(3):1100-1119.