燃气可控发动机原位标定数据处理①
2011-08-31刘向阳张广科魏志军王宁飞
郭 祎,刘向阳,张广科,魏志军,王宁飞
(1.北京理工大学 宇航学院,北京100081;2.北京电子工程总体研究所,北京100854)
0 引言
为使导弹直接命中快速的机动目标,除了利用精确探测技术来提高导弹的跟踪精度,还需通过末端控制来改善导弹的制导精度。在高空中因大气稀薄,传统的气动翼面控制方式在响应速度和制导精度上已难以满足要求,直接力控制成为有效的制导方式[1]。燃气可控发动机是直接力控制的结构方案之一,其原理是以燃气发生器作为控制动力源,以阀门喷喉组件或射流阀作为执行机构,通过调节控制信号的占空比,对弹体施加持续时间不等的侧向控制力[2]。为了考核燃气发生器和执行机构的匹配性是否满足要求,以及两者集成后的技术指标是否达到设计要求,必须进行地面静止试验。进行燃气可控发动机静止试验时,由于推力是两正交方向若干传感器共同作用的结果,不同于常规火箭发动机推力试验的装置模型,一般推力测试原位标定的方法不再适用[3-4]。文献[5]设计的推力矢量测试系统对发动机推力矢量进行了标定,但并未对耦合引起的附加力进行处理。文献[6]提出了适用于六分力传感器的数学模型并设计了相应的标定算法,但其模型属于非线性模型,标定算法较为复杂,对燃气可控发动机原位标定并不适用。
本文结合燃气可控发动机测试模型对原位标定数据的处理方法进行研究。其研究结果对其他直接力控制方式的发动机原位标定数据处理也具有借鉴意义[7]。
1 测试系统组成
某型燃气可控发动机通过十字布置的四通道电磁阀周期性开闭,产生方向、大小可调的平面力。该燃气可控发动机静止试验主要用于考核该型发动机推力控制效果和工作状况,测试系统具体组成如图1所示。
试验台结构如图2所示,其工作原理为:由压电力传感器(编号Ⅰ~Ⅳ)和挠性件组成的推力组件置于试验台同一水平面内X、Y两正交方向,用于平衡燃气可控发动机产生的推力;由高精度应变力传感器和标准负荷测量仪组成的原位标定系统,通过在燃气可控发动机喷喉处(方向与传感器布置位置相同),采用螺旋加载方式产生模拟发动机工作的推力,以实现原位标定功能;施加力值大小由标准负荷测量仪直接读出。

图1 测试系统组成示意图Fig.1 Schematic drawing of the test system with typical defects
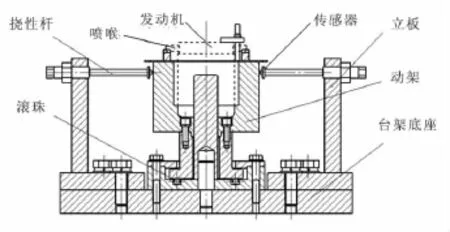
图2 推力试验台结构示意图Fig.2 Schematic drawing of thrust test bed
2 标定数据处理方法
2.1 推力测试模型
由于试验中所测平衡推力是多个传感器与试验台共同作用的结果,因此应设法建立标定推力与4个传感器输出电压之间的测试模型。
当在X方向施加推力时,安装在该方向上的传感器Ⅰ、Ⅱ对平衡发动机推力起主要作用,并且所在位置与推力方向一致的传感器因受压对推力测试的贡献较大,其平衡力可表示为

式中 Vi(i=1,2)为传感器Ⅰ、Ⅱ输出给数据采集系统的电压值;Bi为推力传递系数,与测力组件的结构型式及参数有关,通常接近于1;Gi为电压-推力转换系数,与压电力传感器灵敏度、电荷放大器的放大倍数及数据采集系统精度等有关。
由于动架耦合及测力组件安装定位等因素的影响[8],此时还会在传感器Ⅲ、Ⅳ位置产生附加的推力F3X、F4X和交联力 F3Y、F4Y,并且具有

其中,Ki为推力比例系数。需要说明的是:F'3X、F'4X相对F3Y、F4Y很小,并且传感器的横向灵敏度远小于其工作方向的灵敏度,因此 F'3X、F'4X引起的输出电压变化可忽略。
类似的,当在Y方向施加推力时,其平衡力为

根据静力平衡关系,发动机推力分量FX、FY与传感器平衡力之间有

将式(1)~式(3)代入式(4),整理成矩阵形式有

至此得到了燃气可控发动机推力测试模型。
2.2 基于简化模型的标定系数算法
在测试精度要求不高并且对试验台进行反复调试后,可对式(5)作如下简化假设:
(1)测力组件仅发生完全弹性的压缩变形,推力传递系数满足理想状况,即 Bi(i=1,2,3,4)=1;
(2)动架耦合很小,测力组件安装定位误差可忽略,此时附加推力可忽略不计,即 Ki(i=1,2,3,4)=0;
(3)同一推力方向上传感器、电荷放大器及数据采集系统通道性能基本一致,即G1=G2=GX,G3=G4=GY。
由此得到简化后的推力测试模型:

简化模型可看作单输入-单输出的系统,进行简单的拟合处理即可获得推力标定系数。原位标定时,由于同一推力方向上的两电压-推力转换系数不完全相等,测力组件对正向力和负向力的贡献也各不相同,正向和负向标定时的标定系数并不完全一致,因此需要分别计算X和Y方向的正向和负向标定系数GXP、GXN、GYP和GYN,并以算术平均值作为该方向的推力标定系数,即

2.3 基于精确模型的标定系数算法
试验台安装、调试和标定过程中不可避免地存在通道灵敏度差异、安装定位误差及台架耦合等影响因素,因此当测试精度要求较高时,以上假设不再成立。此时,基于简化模型的标定系数算法不再适用。
对式(5)进行整理得
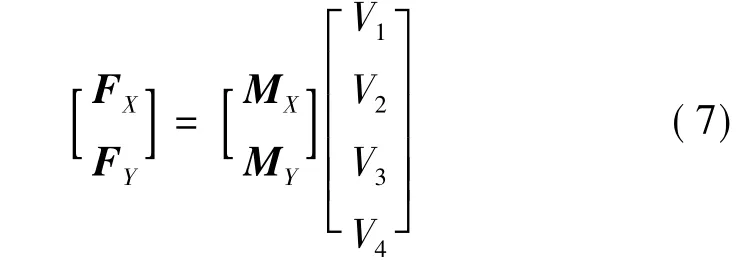
其中:

对试验台分别在4个传感器所在方向(X正向、X负向、Y正向和Y负向)施加力进行n阶标定,得到各阶推力对应的一组电压输出。此时X方向上有
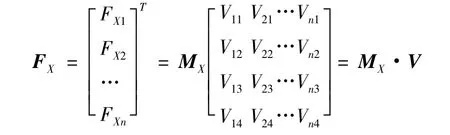

最小。由此得到Mx的解:

同理可得Y方向的标定系数:

3 不确定度评估
螺旋加载时所加力值不易精确控制,因此采用拟合精度法评估标定数据处理算法的不确定度。记标定时输入的已知力值为F0,推力拟合值为F,标定点数为n,未知量数目为t,则拟合结果的标准差为

其中,简化模型取t=1,精确模型取t=4。
再分别以2种标定算法所得结果中的最大拟合值与最小拟合值之差的绝对值FFS作为其量程计算,2种标定方法拟合的相对不确定度:

式中 uα为置信系数,一般按置信度为95%的正态分布选取 uα=2。
4 数据处理结果
某次试验标定时按压电力传感器量程的20%进行预紧,分别向传感器所在的4个方向施力,并得到一系列标定数据。以下以X方向为例说明标定数据的处理结果,各个压电力传感器的原始标定数据见表1。
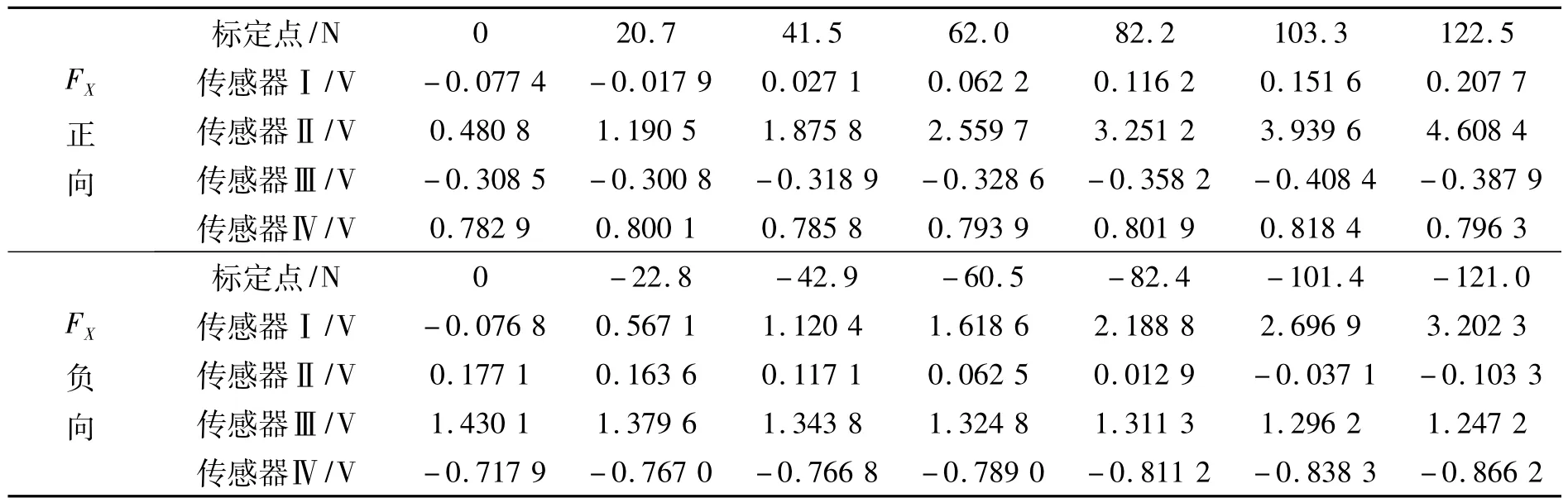
表1 推力测试标定数据Table 1 Calibration data of thrust measurement
从表1可看出,受压方向的传感器输出变化明显 大于受拉方向传感器的输出,即同一方向上的2个传感器对推力正负两边的贡献存在明显差异。对表1数据去除零点后,根据式(6)所示的简化模型进行标定数据处理,处理结果为:GXP=31.903 9 N/V,GXN=33.934 5 N/V,GX=32.919 2 N/V,两方向标定系数差约为6.17%。采用GXP、GXN及GX拟合效果如图3所示,其中U=V2-V1。利用式(9)和式(10)计算得到的简化模型相对不确定度UP=2.06%。可看出:同一方向上2标定系数虽有差异,但较为接近,简化模型算法可作为一种近似的燃气可控发动机原位标定处理方法;标定系数差异是造成简化模型算法精度较低的主要因素,如需提高测试精度,则需要进一步仔细调试测试系统,以便同一方向上的2传感器输出更加一致,但在试验现场,这一做法将会大大增加调试工作量。
类似地,对表1数据去除零点后,依据式(7)所给的精确模型,利用式(8)进行原位标定数据处理,处理结果(单位:N/V)为

利用式(9)和式(10)计算得到的精确模型相对不确定度Un=0.31%。与简化模型算法相比,精确模型算法拟合效果更好,拟合结果与推力原始值符合更好。2种方法的拟合结果对比如表2所示。
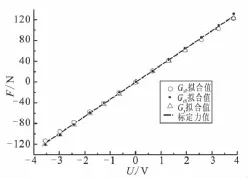
图3 简化模型拟合结果示意图Fig.3 Fit results of the simplified model
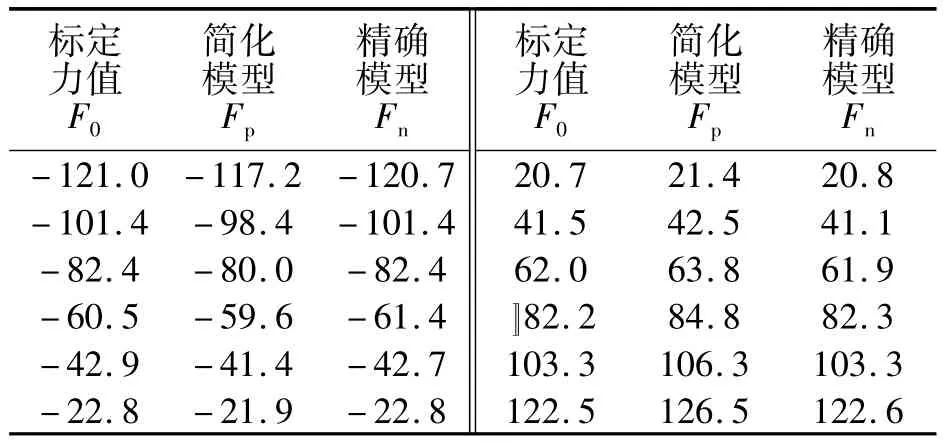
表2 简化模型与精确模型拟合结果对比表 NTable 2 Comparisons between fit results of the simplified model and those of precise model
进一步分析精确模型的处理结果。当标定力值为122.5 N时,传感器Ⅲ和Ⅳ贡献的附加推力之和为0.2 N,仅为标定力值的0.17%,与动架耦合的理论计算结果大致相当;而当标定力值为-121 N时,传感器Ⅲ和Ⅳ贡献的附加推力之和为1.39 N,占标定力值的1.15%,并且基本上都是由传感器Ⅳ贡献的。这表明试验现场还存在对试验台附加推力影响更严重的因素,初步分析认为传感器与动架定位不准是主要原因。
5 结论
(1)简化模型算法可作为一种近似的燃气可控发动机原位标定处理方法,其标定系数相对不确定度为2.06%,其中两方向标定系数差异是造成简化模型算法精度较低的主要因素。
(2)相对简化模型,精确模型算法获得的标定系数精度有明显提高,相对不确定度从2.06%提高到0.31%。
(3)精确模型算法能够表征通道灵敏度差异、动架耦合及定位不准等现场因素的影响,从而降低对试验台调试的要求。
[1]樊宗臣,吴晓燕.直接力控制在防空导弹中的应用[J].电光与控制,2008,15(1):88-91.
[2]彭增辉,姚晓先.动态力测试数据处理及误差分析研究[J].固体火箭技术,2008,31(5):539-542.
[3]张学成,于立娟.火箭发动机推力试验装置应用范围研究[J].宇航计测技术,2005,25(2):7-12.
[4]孙宝元,邢勤,等.小力值火箭发动机推力测量静态标定装置研制[J].大连理工学报,2009,49(4):526-530.
[5]王志勇,孙宝元,等.对火箭发动机推力矢量测试系统的标定[J].传感器与微系统,2007,26(1):64-66.
[6]李培玉,谭大鹏,等.六分量力传感器及其校准系统[J].中国机械工程,2005,16(17):1523-1526.
[7]方蜀州,张平.远程火箭校正发动机柔性试车台振动特性分析[J].推进技术,2001,22(4):279-281.
[8]老大中,张平.全通道燃气试验台交联力及振动计算[J].北京理工大学学报(英文版),2002,9(3):231-236.
