船舶电力推进系统特性仿真实验研究
2011-07-25焦勇
焦 勇
(渤海船舶职业学院,辽宁葫芦岛 125005)
1 引言
电力推进是一种有广阔应用前景的先进的船舶推进方式。建设小比例的船舶电力推进仿真系统,有利于开展电力推进关键技术研究;同时小比例的实物船舶电力推进仿真系统上的实验数据对研制船舶电力推进系统具有借鉴及参考意义。本文主要设计了三种船舶电力推进系统典型工况的仿真实验,并对实验结果进行了分析[1]。
2 实验装置设计
实验室采用了符合实船应用的整套电力推进系统,包括船用发电机组、配电板、能量管理系统、移相变压器、变频器、推进电机、负载电机和监控系统。整套系统联动,可以模拟实船应用中的各种工况,并通过监控系统观察推进系统各设备的运行状态。
系统的最大特点在于混合仿真,所谓混合仿真就是指系统模拟了船舶的两舷推进系统,系统的右舷采用实物仿真,选用SIEMENS公司的6SE70变频器(250 kW)、6SE70制动电阻单元、4GJ三绕组变频变压器(300 kVA)、推进电机1LA8 317-8P电动机(180 kW)、负载电机1LA8 317-8P电动机(180 kW)等设备,组成实轴电力推进系统;而左舷采用计算机仿真的办法,模拟变频器、推进电机和螺旋桨,组成虚轴电力推进系统,如图1所示[2]。
该套系统主要分成四个组成部分:电站系统、推进系统、监控系统和虚轴仿真系统。电站系统布置了三套发电机组,每套容量75 kW。根据备车、港航、巡航、机动航行等不同的工况,自动选择最少运行发电机台数;同时,根据负载变化,进行发电机工作台数的增减,自动完成并车、解列、调频及调载。
虚轴仿真系统模拟船舶的左舷电力推进系统,以右舷电力推进系统设备的运行参数为参照,具有与右舷实轴电力推进系统相同的外在特性。右舷实物仿真推进系统和左舷计算机仿真推进系统均接受来自机旁、集控台、驾控台的操作输入,实轴和虚轴推进系统共享一个数据库,运行结果也均由实验台的仪表和指示灯显示。
3 特性实验与结果分析
3.1 模拟螺旋桨突然受阻试验
航行中螺旋桨可能会遇到漂浮的杂物或大型的鱼类,造成很大的冲击,形成突加负载,导致电机电流急剧升高,电机发热等现象。本实验通过突加负载转矩模拟了螺旋桨突然受阻的情况,监测的各参数曲线如图2。
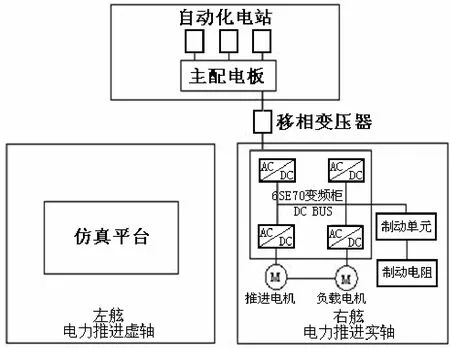
图1 船舶电力推进混合仿真实验装置示意图
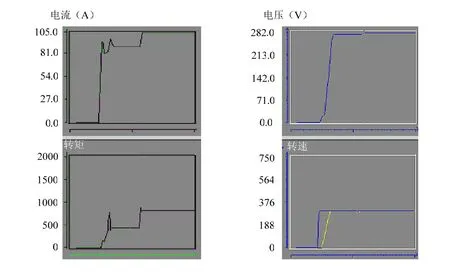
图2 突加负载试验
从图2中可以看出系统在自由航行的稳定状态下突加负载,电机的实际速度有个很小的下降后马上达到给定值,并一直稳定运行。这是因为电动机设定为速度环控制,能对速度的反馈有很好的调节作用,只要负载在额定的范围内变化其速度就会稳定在给定值,只是电流会相应地增加[3]。
3.2 模拟系统紧急停车特性
船舶运行有时需要紧急停车,这就要求系统的停车时间短、响应迅速。将电机的速度从285 rpm突降到零。测试曲线如图3。
图3中显示系统的停车时间相当短,完全能够满足要求。从推进电机的功率曲线中可见,在负载电机扭矩降到零时,由于惯性作用,轴系还在运转,使推进电机处在发电状态,当电机完全停转时功率就回零了[4]。
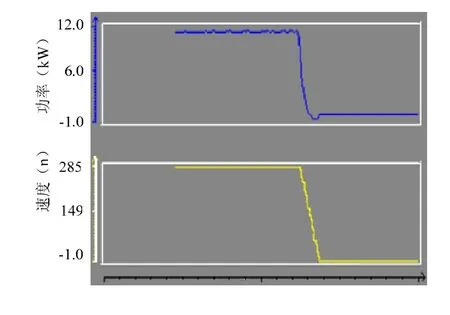
图3 系统紧急停车特性曲线
3.3 不同脉波整流方式的切换
系统采用的是三相移相变压器,将三相 380 V/50 Hz的交流电变成两个相位相差30°的三相690 V/50 Hz的交流电供变频器使用。变频器通过开关可将系统自动分成6脉动整流方式和12脉动整流方式工作,以便于系统模拟不同整流系统下整个系统的谐波因素。
模拟船舶在自由航行下,也就是通过设定负载电机让其扭矩值满足自由航行曲线的特性。在电动机负载、功率、速度等相同的条件下让系统分别运行在6及12脉波整流的状况,监测系统的电压、电流,如图4和图5所示[5]。
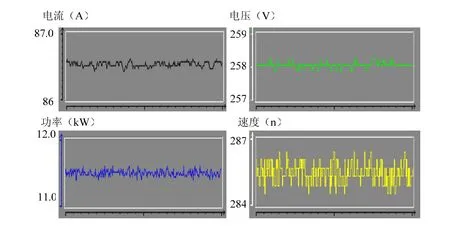
图4 自由航行下6脉波整流特性

图5 自由航行下12脉波整流特性
通过比较6脉波整流和12脉波整流两种状态下的输出电压、电流波形,可以发现 12脉波整流输出波形要比6脉波整流输出波形要平稳,波动要小。可见 12脉波能起到一定的平波效果,有利于系统的稳定运行,也可以减少对通讯及其它设备的电磁干扰[6]。
4 结束语
本文针对船舶电力推进系统中的三种典型工况,设计了相应的仿真实验,实验结果表明该仿真系统能很好地模拟实船工况,有一定的科研及实用价值。
[1] 陈家金,王和平.船舶电力推进系统的发展.世界海运,2006,(4).
[2] 张霞.六相永磁同步电动机特性仿真的研究.上海海事大学硕士学位论文,2007.
[3] 张洋,杨平西,陈琳.船舶电力推进系统谐波特性仿真与试验.船舶工程,2009, (S1).
[4] 赵涛,姜卫东.利用PSPICE仿真分析PWM控制电路.安徽大学学报(自然科学版),2005,(5).
[5] 刘赟,徐绍佐.船舶综合电力推进系统综述[J].柴油机,2004, (2).
[6] 张伟.电力推进系统的实船应用[J].中国水运, 2004,.(7).
