基于SE2000的气动主机遥控仿真训练系统
2011-07-25乔红宇
乔红宇
(南通航运职业技术学院轮机工程系,江苏南通 226010)
1 引言
主机遥控系统的维护管理是轮机员(大管轮)的最重要职责[1]。气动操纵系统是整个主机遥控系统的执行机构,用来执行主机起动、换向、制动、停车及调速等控制指令。系统阀件众多、逻辑关系复杂,传统的课堂教学缺乏实践性、直观性,教学效果不佳。为了提高船员主机操纵系统的使用、管理、维护及故障排除能力,开展甲类大管轮“主机遥控系统的操纵”的项目培训和评估,开发了基于SE2000的MAN B&W 90MC-C柴油机主机气动操纵系统,实现了对该系统的仿真,以帮助学员尽快地熟悉系统工作原理,有效地使用、管理及维护系统,正确处理典型故障,确保船舶运营的安全性[2-3]。
2 气动主机遥控仿真训练系统组成
气动主机遥控仿真训练系统以12K90MC-C柴油主机的主机遥控系统为仿真母型,采用以实物为主导的虚实结合模式的结构,主要包括硬件盘台设备以及软件控制模型。其中硬件盘台设备主要有:仿真模拟示教屏、控制盘台(集控室、驾驶台、机旁三个控制地点)、计算机(包括服务器及接口计算机)、I/O 接口电路板等。
主机气动操纵仿真系统是采用S/C(服务器/客户端)结构的仿真系统,其中教练员工作站为整个系统的服务器也兼作监控计算机,接口计算机是客户端。仿真系统数据通讯采用ISA 总线架构,采用TCP/IP协议,通过网线及智能接口机箱中的数据采集板卡,可以实现教练员工作站→接口计算机→硬件盘台设备及显示设备的数据通讯。控制台及仿真模拟屏上的车钟、开关按钮、旋钮等信号首先通过数字量及模拟量通道输入到接口计算机中,接口机处理后再送往教练员工作站,由仿真运算得到系统状态信号和控制指令,然后将控制指令以及仿真运行得出的显示信号输送至控制盘台及模拟仿真屏上的相关设备。数据的采集、传送、转换及通信的刷新速率可达40 ms。
数据处理可以分为模拟量以及数字量两种,系统中采用三种接口卡/通信卡,分别是PCL722、PCL727、PCL813。其中,PCL722可以提供144路并行数字输入/输出,具有6个连接端口,每个端口有24路I/O 口,本系统中采用PCL722来实现所有数字输入/输出信号(DO/DI)的通讯,如按钮、旋钮状态、显示光带的亮灭等;PCL727是一款具有12路12位的模拟量输出通道的全长卡,卡上的DC/DC转换器能够确保可靠的10 V模拟量输出,本系统采用PCL727实现模拟量输出(AO),如气压表读数、转速等参数;PCL813是一款32路单端带隔离的模拟量输入卡,广泛应用于工业现场与实验室,如传感器输出量监测、过程监控、瞬态分析等方面,本系统采用PCL813实现各种模拟量输入(AI),比如车钟指令、调速器油门开度等。
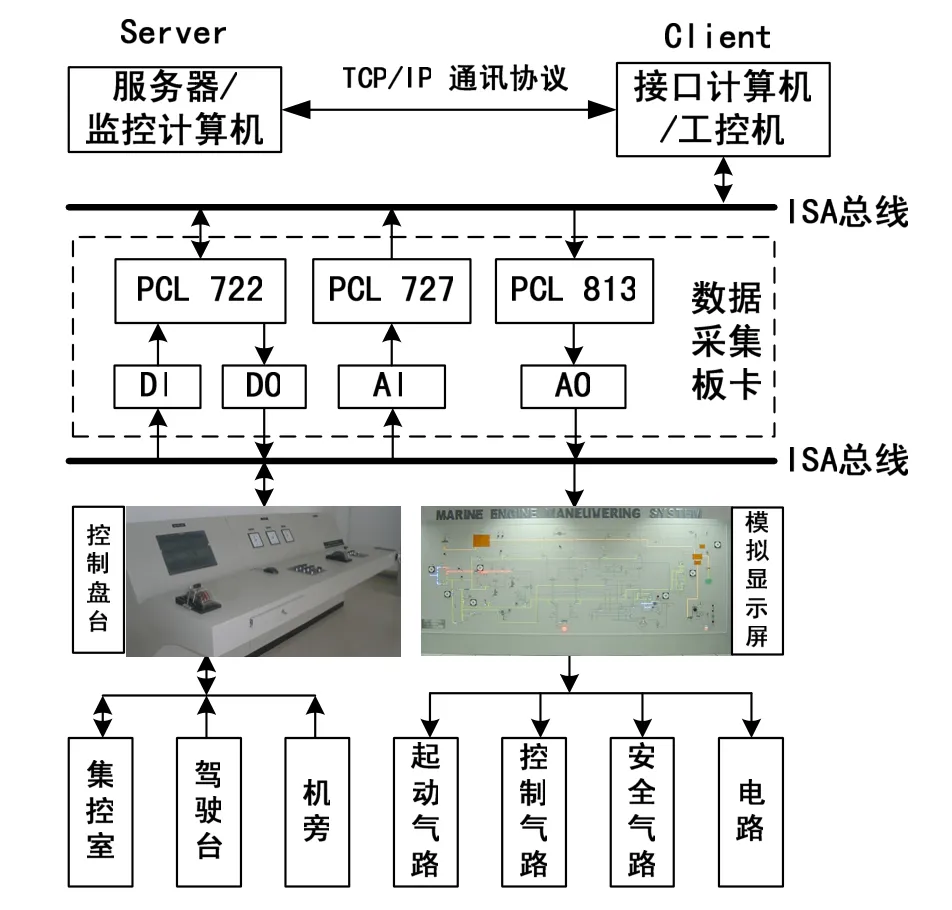
图1 气动主机遥控仿真训练系统组成框架图
3 仿真模型及软件系统设计
软件部分主要包括主机遥控仿真模型、主机遥控监控模型,这些软件模型以Auto Chief-IV主机遥控系统、DGS8800e电子调速器系统及SSU8810主机安保系统为仿真母型,其中:仿真模型以FORTRAN 90为开发语言,在SE 2000(Simulation Engine)仿真平台下运行;监控程序以Visual C++为开发语言,实现对12K90MC-C型主机气动操作系统的完全仿真。
SE2000是介于仿真系统和计算机操作系统之间的工具软件,它提供了专用的实时网络数据库、可视化的动态数据显示、在线数据修改、模型调试、图形化的建模环境并具备功能齐全的仿真功能,主要应用对象为大型科学计算、动态数据监控以及连续过程仿真系统。在FORTRAN 90环境下开发出的气动主机遥控仿真模型导入至SE2000仿真平台下运行即可实现仿真训练功能,完成对 12K90MC-C柴油主机气动操作系统的仿真,仿真逼真程度及训练效果取决于其控制逻辑的完善程度。另外,依托 SE2000的平台优势,还可以实现工况的读取与保存、模型的运行与停止、模型的冻结与解冻、故障设置与清除等进程管理功能。
本系统中,由于服务器与监控计算机是公用的,所以软件系统中的仿真模型以及监控程序实际上在同一台计算机上,他们之间通过接口函数进行变量的数据通讯,然后再借助于进程通讯实现彼此之间的数据交换。系统仿真模型及监控程序所需要的实时参数及状态变量通过数据采集板卡采集后,经接口计算机通过TCP/IP协议传输至服务器,实现软件系统内的数据通讯。整个系统的软件架构如图2所示。
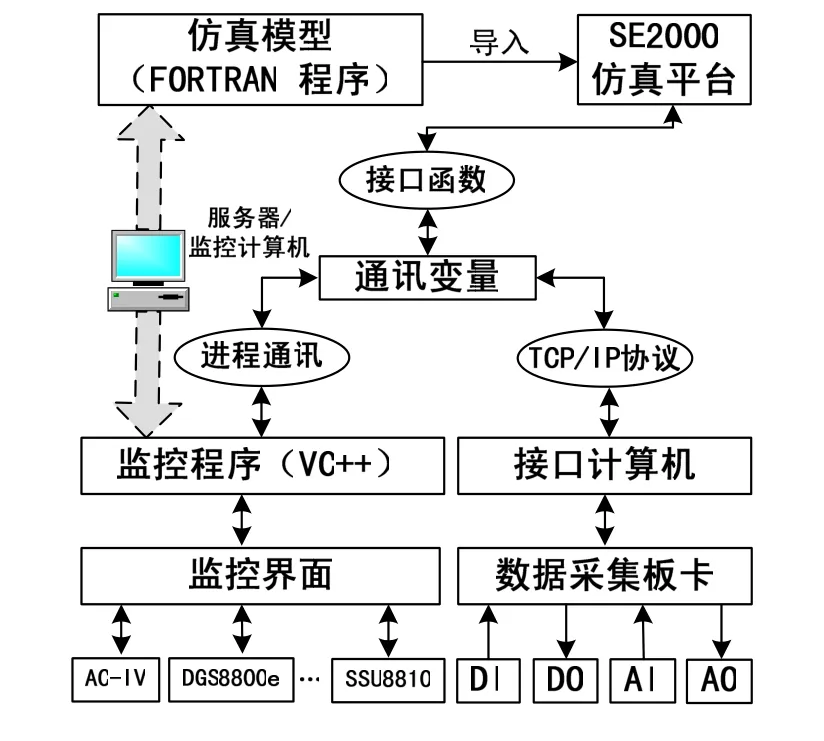
图2 气动主机仿真训练系统软件架构
4 仿真模型控制逻辑及监控界面设计
控制逻辑是整个气动主机遥控仿真模型的核心,它反映了气动主机遥控系统的工作原理,也是实现学员实训功能的前提和基础。在气动主机遥控操纵系统中,主机的起动、换向、停车、速度与负荷控制等控制动作均需要满足一定的逻辑条件,在实物显示上就是相关的阀件状态以及按钮、旋钮切换到位,在软件系统中,通过对实物系统进行数学建模,编制控制程序,使之能够完全反映12K90MC 型主机气动操纵系统的实际工作过程,并且通过与外界盘台设备以及模拟显示屏结合展示实训功能,培养大管轮关于气动主机遥控系统的维护管理能力,提高其职业技能与素养。以正车起动控制逻辑为例,在实际系统中,可以进行起动控制的阀件有三个:集控室的起动机控阀V63、驾驶台起动电磁阀V101、机旁起动手操阀V90。同时为保证起动顺利进行,还需要以下起动控制逻辑条件:1)控制气源阀V1打开;2)起动切断阀V118打开;3)起动空气无低压报警P112;4)盘车机脱开V115;5)遥控(集控或驾控)正车起动时,空气分配气处于正车到位V55,主机己停油Vll7受控。由此可得正车起动逻辑:

在完整的控制逻辑支配下,气动主机操纵仿真训练系统将与实际系统一致进行,具备了仿真训练的基本条件。为了完善实训功能,提高实训水平,方便教学及培训,系统还通过硬件盘台设备以及监控界面为学生提供友好的人机之间的交流与互动,同时监控程序不仅对仿真模型进行参数显示及监控,还提供了微机型主机遥控系统的主要维护管理技能培训功能。图3中左图反映了Auto Chief-IV 主机遥控系统监控主界面的运行状态;右图则反映了集控室操作的监控界面,图中车钟及旋钮与硬件盘台设备相联,可以通过本界面看出主机遥控系统的相关信息。
5 功能实现
本系统主要以培训学员的主机遥控系统维护管理能力为目的,从原理、操作以及故障或处理等各方面对原实物系统进行仿真,主要功能也是从培训目的出发。主要培训功能包括以下几点:
(1)操纵地点的切换。本系统中,有三个地点可以操纵主机分别是驾驶台、集控室和机旁操纵,可以完整体现起动、换向、制动、转速控制、停车等工况下系统各阀件和设备的动作过程和与实际系统相同的逻辑关系。

图3 气动主机仿真训练系统监控界面(左-AC-IV监控主界面;右-集控室操作界面)
(2)故障设置与处理功能。根据故障树分析方法,在实船调研与相关专家咨询调查的基础上,确定以气源单元、起动单元、换向单元、停车单元、调速单元、VIT机构、安保系统故障作为故障组,所有的故障构成故障库;系统具有开放性,可以随时根据需要添加新的故障。
(3)其他功能。系统可完成的其他功能主要包括:主机故障停车(SHUT DOWN)、故障减速(SLOW DOWN)、减缸运行、封缸运行、可变喷油定时控制(VIT)、盘车机操作、完车操作等。
6 小结
本文介绍了基于SE2000的气动主机遥控仿真训练系统,详细阐述了本系统的硬件组成、数据通讯方式、软件部分组成,并在此基础上分析了本系统的培训功能。本系统可以完成大管轮《轮机自动化》适任考试评估中主机遥控部分各个项目的培训及评估要求,目前已为4届近200人提供了训练及评估平台,取得了很好的仿真训练效果。
[1] 陈立军,黄学武,郑华耀. 多重网络型船舶主机遥控仿真系统的设计与开发. 船舶工程, 2009(6):52-55.
[2] 高海波,陈辉,唐洪,尚前明.大型船用主机气动操纵系统的仿真.天津航海, 2007, (1):20-23.
[3] 凌君谊.MAN B&W 12K90MC型船用主机气动操纵系统的仿真.中国水运, 2009, (1):117-118.