渐开线蜗轮在UG中的精确参数化造型设计
2011-06-23颜科红
颜科红,殷 蕾
(无锡科技职业学院,江苏无锡 214028)
蜗轮传动是传递交错轴(交错角通常采用90°)间动力或运动的传动机构,由蜗轮和蜗杆组成。蜗杆相当于一个单头或多头等导程螺旋,蜗轮则是变态斜齿轮。蜗轮传动可以实现很大传动比,结构紧凑,并且工作平稳,噪音小,在近代工业中得到了广泛的应用。
蜗轮的齿廓部分结构形状比较复杂,本文利用UG的三维参数化造型功能与表达式工具相结合,绘制精准的蜗轮三维模型,利用更改表达式中蜗轮参数,就可以实现新的数据驱动三维模型,使设计的结果具有很好的延续性和继承性,从而提高蜗轮的设计效率。
1 蜗轮参数化设计思想
蜗轮的参数化设计,主要是利用UG中的表达式功能,构建渐开线齿槽截面及其他相互关联的曲线,并通过特征操作实现齿轮完全参数化设计。所有表达式均有惟一的名字和一字符串或公式,它们可以包含数字、运算符、函数、符号和变量的组合。表达式还可以导出来,保存为扩展名为“***.exp”的文件,并可以通过文本进行编辑、注释与修改等,然后再导入表达式,修改相当方便。
蜗轮的主要几何尺寸包括模数m、齿数z、压力角α、螺旋角β、中心距L、轮齿厚度B等。由于UG中表达式的名字不能出现α、β等希腊字母,故需用其他字符代替。其基本参数用表达式表示如下:
ma=4//模数;
z=39//齿数;
j 0=20//压力角;
j=11.3099//螺旋角;
L=98//传动中心距;
B0=20//半齿宽。
该蜗轮的其他计算几何尺寸参数表达式为:
d=ma*z//蜗轮分度圆直径;
ha=1//齿顶高系数;
c=0.2//顶隙系数;
da=d+2*ha//顶圆直径;
df=d – 2*ma(ha+c)//齿根圆直径;
L1=d*pi*tan(j)//螺距;
L2=pi*ma//轴向齿距;
θ=2*360/z//半齿角。
2 蜗轮零件实体构建
2.1 构建蜗轮轮坯实体
进入UG 6.0建模模块后,选择“工具→表达式”命令,建立轮坯草绘所需的尺寸参数的表达式,如图1所示。
单击“草绘”按钮,以XC-ZC平面作草绘平面,进入草图环境,绘制蜗轮半截面草图,并采用上述步骤所建立的表达式进行参数化标注,结合相关的位置约束,完成草图。利用“旋转”工具,选取蜗轮半截面草图,以XC轴作为旋转轴,基点为原点,创建旋转体,生成蜗轮坯体,如图2所示。

图2 旋转蜗轮实体
2.2 构建渐开线齿槽截面
(1)建立渐开线表达式。选择“工具→表达式”命令,建立渐开线表达式。

(2)构建渐开线。选择“旋转WCS”命令,将坐标系绕–YC轴旋转90°,再绕+XC轴旋转180°。
单击“规律曲线”按钮,选取“方程曲线”按钮,取默认基础变量为t,xt为变量;再取基础变量为t,设置yt1为变量。返回“规律函数”对话框,单击“恒定”按钮,输入规律值0,单击确定,生成一段渐开线。将XC-YC坐标平面绕ZC轴旋转角度s=a1+2 b1,其中a1=180/z,b1=deg(t AN(a1)– r a d(a1)。再次选择“规律曲线”命令,取默认基础变量为t,x t为变量;再取基础变量为t,设置yt2为变量。其他操作与构建第一条渐开线相同,产生与之对称的第二条渐开线(如图3所示)。
(3)构建齿槽截面。以原点为圆心,以渐开线端点为起点,绘制齿根圆圆弧,半径为df/2;再绘制一大于顶圆的圆弧,半径为da/2+2,构成曲边四边形作为齿槽截面线框,修剪多余圆弧段,结果如图4所示。

图3 渐开线

图4 蜗轮齿槽截面及扫掠用螺旋线
2.3 构建扫掠实体
(1)构建扫掠螺旋线。沿XC轴绘制蜗杆轴截面中心位置线,所绘直线与YC轴平行,通过点(0,0,98)。并用“偏置“命令将该直线向上偏置10 mm,作为确定螺旋线放置起点的方位线。
单击“螺旋线”图标,设置相应参数,注意螺旋线的轴心绝对坐标应为(0,0,98),旋向为右旋,构建一段螺旋线。单击“螺旋线”图标,将“旋向”设置为左旋,其他参数不变,生成另一段螺旋线,结果如图4所示。两段螺旋线形成切割蜗轮齿槽的扫掠引导线。
(2)构建扫掠螺旋槽截面的实体。选择“扫掠”命令,选取齿槽截面线框为扫掠截面,选取螺旋线段为引导线,“截面位置”选项设置为“沿引导线任何位置”,定位方法设为“固定”,单击“确定”按钮,构建扫掠实体,结果如图5所示。

图5 扫掠螺旋槽截面实体
2.4 构建蜗轮齿槽
(1)旋转复制扫掠螺旋槽截面形成的实体。选取扫掠螺旋槽截面形成的实体,选择“移动对象”命令,在变换选项组中,选择“角度”选项;ZC轴作为矢量,坐标原点作为轴点,“角度”栏输入:360/z(z为蜗轮齿数的表达式);结果选项组中,选取单选项“复制原先的”;“距离/角度分割”栏输入“1”;非关联副本数栏输入“z–1”;单击“确定”按钮,结果如图6所示。
(2)进行布尔求差运算。选择“布尔求差”命令,选取目标体为蜗轮坯体,刀具体为z个扫掠体(本例蜗轮齿数为39),单击“确定”按钮,生成所有蜗轮齿槽。最后蜗轮的键槽、轴孔和倒角及其他结构的形状、尺寸可以根据需要作出。完整的蜗轮模型如图7所示。
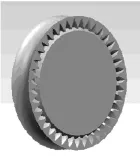
图6 旋转复制扫掠体

图7 完整蜗轮模型
3 结束语
采用UG自身功能提供表达式关联功能,可以方便地实现蜗轮的参数化设计和自动特征建模,很大程度上提高了蜗轮设计的效率和品质。在利用方程式建立第一条渐开线曲线后,如果采用旋转或者镜像生成另一条渐开线齿廓曲线,则会使曲线失去参数,继而无法实现参数化控制,必须使用两个渐开线方程分别生成两条渐开线曲线,才可以实现全参数化控制。采用本文提出的方法生成的蜗轮实体模型,能够应用于装配设计、干涉检验、运动仿真、数控加工等方面,为蜗轮的进一步研究提供准确的实体模型。
[1]赵延岭.蜗轮传动优缺点及研究方向 [J].一重技术,2006,(4):19-20.
[2]赵文娟.蜗轮蜗杆类零件的建模分析 [J].制造业信息化,2009,(1):41-43.
[3]李 峰.SIEMENS NX6.0零件造型与数控加工编程[M].北京:化学工业出版社,2010.
[4]李书平.基于UG的渐开线蜗轮参数化设计[J].机械设计与制造,2009,(5):222-223.