自行式电动割草机的试验研究
2011-06-23刘兴燕
刘兴燕
(山东黄河梁山机械厂,山东 梁山 272600)
2002年,水利部黄河水利委员会提出黄河下游标准化堤防建设,构筑防洪保障线、抢险交通线、生态景观线“三位一体”的标准化堤防体系,通过放淤固堤、堤防帮宽、堤顶硬化、防浪林以及险工控导加固改建等项目建设,构造维持黄河健康生命的基础设施,达到人与自然环境和谐,谋求黄河长治久安。
随着黄河下游标准化堤防建设的进行,对工程养护的要求标准也大大提高,既要保证工程强度,又要注重美化。如对堤坡上的防护草皮,在保证其护坡能力的同时,由过去的任其自然生长,变为要求整齐美观,规范划一。为保持工程面貌,在夏季植物生长旺盛季节,需要对堤坡草皮经常进行修剪。堤坡除草作业以往多采用劳动密集型镰割工作方式或人工拔草,不但人力投入多,劳动强度大,而且作业条件艰苦,工作效率低,往往经过多次修剪,也达不到整齐规范的品质目标。
近几年来,随着机械化、自动化的日益普及,在黄河堤防养护工作中,割草作业逐步向机械化迈进,当前多采用背负式内燃割草机,但设备整机总质量较大,振动强烈,对人的健康危害较大,长期作业无疑会严重影响操作人员的身体健康。
为服务于黄河防洪工程的标准化管理,改善堤坡除草人员的劳动条件,我们立足于黄河下游标准化堤防的实际养护工作,考虑在堤防养护中,割草作业的经常性、安全性等实际要求,在深入调查的基础上,博采众长,本着采用新材料、新技术、新工艺的原则,于2009年8月研制出一种低噪音、机动灵活、能在堤坡上自动行走且操作简单、机械化效率高的新型割草设备。在2010年6月通过山东省科技厅组织的产品鉴定。该设备主要由电动割草装置、自动行走装置、机架底座、发电机组及电缆盘、操作控制系统、动力系统等组成,是一种可在坡度小于1∶2.5的堤坡上自动行走的履带式割草设备,运行机动灵活,效率高,割草效率可达1400m2/h,专家一致认为,整体上达到国内领先水平。
1 自行式电动割草机的结构组成
ZG-1230型自行式电动割草机的结构,主要由电动割草装置、自动行走装置、机架底座、发电机组及电缆盘、操作控制系统、动力系统等部分组成。其基本外形结构如图1所示。

图1 ZG—1230型自行式电动割草机
2 技术参数及各部分的设计计算
2.1 主要技术参数
整机总质量(kg):520;
轮距(mm):970;
轴距(mm):970;
链轮直径(mm):470;
行走速度(m/min):18;
割草电机功率(kW):1×3;
行走电机功率(kW):1.1;
最大割幅(mm):1234;
最大爬坡能力:≤1∶2.5;
割刀高度调节范围(mm):离地60~160;
作业效率(m2/h):1200~1400。
2.2 割草面积的计算
根据工作环境状况及市场调研,决定选用3台RT 8020型大功率割草电动机。如图2所示。

图2 割草面积示意图
每台割草电动机的割除草面积为
其中,

所有阴影部分的面积即为割草面积,即所有圆减去重叠部分的面积Sc,如图3所示。
圆(x-210)2+y2与直线x=13所围成图形面积,即为重叠部分的面积Sc。
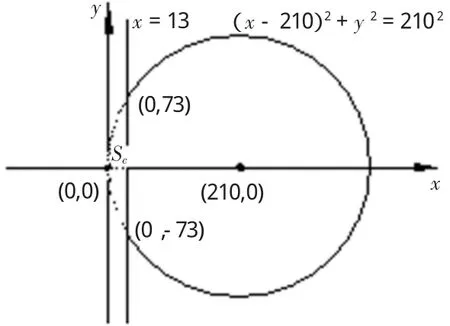
图3 重叠面积


2.3 行走电动机功率校核计算
已知参数:
ZG-1230型自行式电动割草机的自身总质量为G=520 kg;
行走电动机的转速为n2=910 r/min;
减速器传动比为i1=1∶25;
差速器传动比为i2=1∶3;
链轮直径为R1=470 mm=0.47 m;
则链轮的转速为n3=n2i1i2
=910×1/25×1/3
=12.2 r/min,
则割草机行走速度为ν行=π R1ω2
=π×0.47×12.2
≈18 m/min;
钢对地面的摩擦系数为μ=0.20~0.35,取
μ=0.25,
链轮传动效率为90%;
ZG-1230型自行式电动割草机爬坡工作时,受力如图4所示。

图4 电动割草机行走受力图
从图可知,

把已知数代入,得
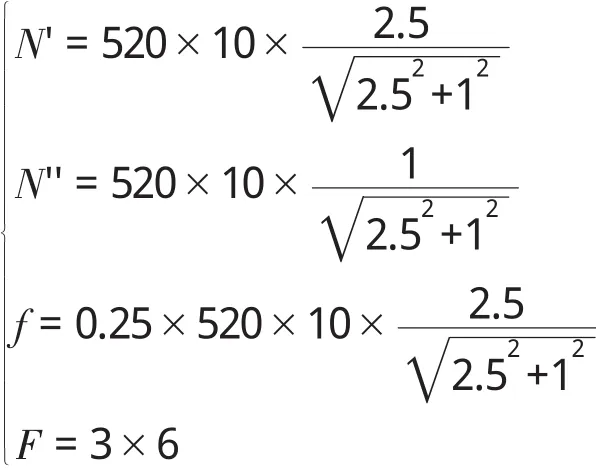
计算得

则

所需电机功率计算得

所选电动机为1.1 kW。

故所选电动机能够满足设计需要。
2.4 链轮的选择
链速度ν=18 m/min
电动机功率P=1.1 kW
由链轮速度ν=18 m/min
希望结构紧凑,初步确定链轮齿数Z1=45
考虑工作平稳,电动机拖动,选工况系数KA=1.0,则计算功率Pc=PKA=1.1×1.0=1.1 kW
考虑自行式电动割草机的行走特点,选双排链,查得多排链系数Kp=1.0,
齿轮系数Kz=1.1,
链长系数Kl查参考文献[1]确定为Kl=1.06,
所需传递功率

查图5选满足要求的20 A链,p=31.75 mm

图5 滚子链的额定功率曲线
初步设计中心距为a=970 mm,
链轮齿数Z1=45。
则链节数

因链速为ν=18 m/min,小于0.6 m/s,其失效形式是过载拉断,应进行静强度计算,链的静强度安全系数n应满足如下要求
式中,
Q为单排链的极限拉伸载荷;
m 为链板宽(mm),m=520;
KA为工况系数;
F1为链的紧边工作拉力;
F为工作拉力;
F=3974 N
Fc为链两边所受的离心拉力
Fc=qν2
Ff为链条下垂而产生的悬垂力
Ff=Kfqga
其中,
ν为链速;
q为每米长度链的净质量;
Kf为垂度系数;
a为中心距;
g为下垂度,取0.02。
[1]确定
Q=86.7 N;
KA=1.0;
q=3.8 kg/m;
Kf=7。
把已知数据代入得

故满足设计要求。
3 创新点及推广前景
通过与国内外同类产品的比较,总结该割草机具有以下创新点:
(1)将履带式链轮行走机构有机地与割草设备组合在一起,实现了该设备在堤坡上工作运行灵活行走的目的;
(2)巧妙地将后桥差速传动装置和液压鼓式刹车系统有机结合,利用两侧轮毂单独制动,解决了整机行走转向的难题;
(3)设计了割草高度调整装置,便于调整割草高度,以适应不同的地形;增设两道漏电保护罩装置,增加了操作人员的安全系数;采用了电气控制方式集中控制,自动化程度高,操作容易,快速灵活;增设两道漏电保护装置,提升整机安全性;
(4)电动割草机头部结构布置呈品字形,前一后二,且前一切割圆与后两切割圆相外切,保证3个电动割草机头在工作时互不干扰,保证割草品质。
(5)其利用高速旋转的尼龙绳割断草茎,由于尼龙绳具有柔韧性,使其遇到硬性障碍物时会退让,不损伤人和机器,安全性能高。
该设备适用于堤坡割草养护作业,其性能优良、结构紧凑、操作方便、工作可靠,具有经济性、实用性和灵活性等优势,能达到投资少、见效快的效果。
近年来,随着黄河防洪工程管理标准化的开展,临背河堤坡坡比已经逐步调整为1∶3的比例,坡面的平顺度也有了较大的提高,这给机械化修剪草皮提供了便利条件,机械化割草不仅可以节约大量开支及节省劳动力,还可以提高工程维护品质。
ZG-1230型割草机是针对堤防养护工作的实际需要,为提高割草作业工作效率、降低操作工人的劳动强度、减少高强度作业给一线工人带来损害而研制的一种新型履带式自行电动割草设备。每小时割草是背负式割草机工效的15倍,可见其不但具有良好的社会效益,还具有较高的经济效益,在当前标准化堤防建设和管理日益加强的情况下,将有十分广泛的推广前景。
4 结束语
社会进步要求以机械取代人工作业,堤防管理要尽可能改善管理养护人员的工作条件,降低劳动强度。管理养护机械化是提高养护作业品质与进度的重要手段,是实现由传统养护方式向现代养护方式转变的物质基础。因此,投入各种专用机械用于维修养护,提高维修养护的机械化程度,减轻劳动强度非常必要。
参考文献:
[1]吴宗泽.机械设计手册(上册)[K].北京:燃料化学工业出版社,1970.