码垛机器人本体结构分析与性能研究
2011-06-23刘广亮
李 倩 ,刘广亮 ,孙 洁
(1.山东省机器人与制造自动化技术重点实验室,山东 济南250014;2.山东省科学院自动化研究所,山东 济南250014)
码垛机器人是实现包装和物流自动化的关键装备,针对生产线中各式产品的码垛要求,可实现自动、高速、准确、连续的码垛作业,并能降低工人劳动强度,提高生产效率。因此,码垛机器人被广泛应用于饮料、食品、药品、石化等领域,具有广阔的应用前景。
目前,ABB、FANUC、KUKA等主流机器人厂家均拥有系列化的码垛机器人产品,并垄断了国内外市场;而在国内,码垛机器人的研究才刚刚起步,国产的、成熟的、产业化的码垛机器人产品还未出现[1~3]。
本文参考国内外知名品牌机器人,通过分析已有产品的结构特点,研究各品牌机器人的本体性能参数,大致明确了产品设计的基本指标,为码垛机器人开发提供参考。
1 结构分析
与通用型机器人不同,码垛机器人有独特的作业特点:搬运物料实现空间内的平移和水平面内的旋转,无需进行物料的翻转,因而采用了独特的结构。下面以KUKA的KR 180-2 PA为例,对码垛机器人一般所采用的结构形式进行分析。
KR 180-2 PA最大负载总质量为180 kg,采用4轴铰链式结构,由6部分组成:基座、腰转部件、大臂、小臂、腕部和工具法兰,由JT 1、JT 2、JT 3和JT 4共4个关节驱动,其结构形式如图1所示。
其中,JT 1驱动腰部转件实现回转运动,JT 2和JT 3分别驱动大臂和小臂的摆动,JT 4驱动工具法兰旋转。各关节由交叉滚子轴承承载,利用交流伺服电机+精密RV减速器驱动。根据物料形状特点,可以在工具法兰配置不同的抓手。机器人末端工具法兰的位置,通过控制JT 1、JT 2和JT 3关节来实现;末端工具法兰的姿态,则通过控制JT 1和JT 4关节的转动来保证;在腕部姿态的控制上,采用了独特的结构。通过两组平行四连杆传动,实现了JT 4轴线与JT 1轴线始终保持平行,使腕部始终保持垂直于地面的姿态。

图1 码垛机器人KR 180-2 PA结构示意图
2 本体性能研究
码垛机器人主要用于搬运重载物体实现大空间转移,且高速度、高精度运行,其本体的主要性能参数包括负载能力、工作空间、运动性能、重复定位精度等[4]。这些性能参数选择的合理与否,将直接关系到码垛机器人本体开发的成败。以下通过分析比较已有码垛机器人产品的性能参数,基本明确了码垛机器人本体开发中的各项性能指标。
2.1 负载能力
负载总质量表明了机器人搬运重物的能力,它取决于机器人的结构尺寸和驱动容量,还与机器人的运行速度有关。按照负载总质量能力划分,各机器人厂家均形成了完整的码垛机器人规格系列,表1列出了 ABB、FANUC、KUKA、YASKAWAKAWASAKI这5大品牌的四轴码垛机器人负载系列[5]。

表1 各品牌码垛机器人的负载总质量系列规格表(单位:kg)
在包装行业,对于码垛机器人的需求主要集中在100~300kg负载总质量范围内。而在这一区间里,各品牌一般拥有大小两种规格的机型,且采用统一的外形尺寸与机械结构,只需替换伺服电机与减速器,即可实现型号间互换。如ABB的IRB 660-180和 IRB660-250、KUKA的KR100-2 PA和KR 180-2 PA、FUANC的 M-410 iB/160 M-410 iB/300 KAWASAKI的ZD 130 S和ZD 250 S等。
2.2 工作空间
工作空间指机器人末端可在空间到达的最大范围。图2是ABB的IRB660-180、KUKA的KR180-2 PA和KAWASAKI的ZD 130 S工作空间的叠加图。可以看出,各款机器人的工作空间基本重合,大致反映了市场的实际需求(托盘尺寸、垛堆高度等)。

图2 码垛机器人的工作空间

表2 各品牌码垛机器人性能指标横向比较
表2将各品牌码垛机器人对应型号的性能指标进行了横向比较,从中可以发现码垛机器人性能指标的共性[6~8];表3则以KUKA为例[6~8],将码垛机型KR 180-2 PA与其对应的通用机型KR 180-2进行了纵向比较[7],凸显了码垛机器人不同于通用型机器人的性能特点。
表2中,数款机器人的最远到达距离,都约为3200 mm,而最大搬运高度约为3000 mm。
2.3 运动性能
为了适应前端包装工段的生产速度,码垛作业往往对节拍要求高。目前,世界上码垛速度最快的机器人,可达2000回/h以上。当然,最直接的运行性能参数,还是各个轴的运动速度。表2列出了几款机器人各个轴的最大运动速度,可作为本体设计的参考指标;表3中,各个轴逐一对比,KUKA的码垛机型KR 180-2 PA比通用机型KR 180-2的运动速度都要快,显示了码垛机器人本体设计里运动性能的重要性。
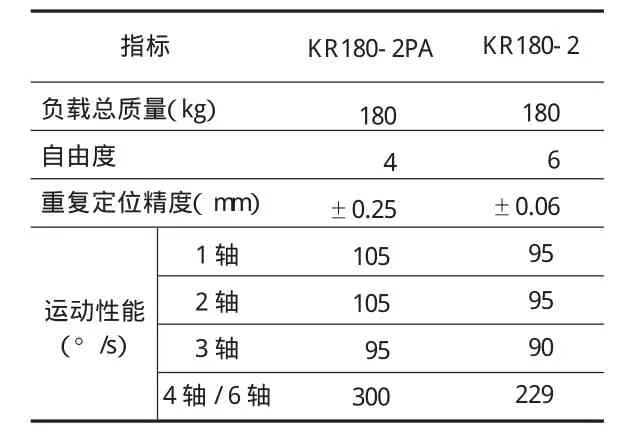
表3 KR 180-2 PA与KR 180-2的纵向对比
2.4 重复定位精度
重复定位精度,指机器人在相同的运动指令下,连续重复运动若干次,其位置之间的误差度量,是机器人的主要技术参数之一。码垛机器人主要用于实现大尺寸物料的点位运动,对精度要求并不高。从表2可看出,其重复定位精度能控制在±0.5 mm以内即可;在表3里,码垛机型KR 180-2 PA比通用机型KR 180-2的重复定位精度明显低了一个档次。
3 结束语
通过对已有码垛机器人产品的结构分析和本体性能参数的研究,得出了其通常所采用的结构形式,明确了本体设计的基本性能指标,为产品开发提供了参考。但在具体产品开发过程中,仅确定了本体的结构形式、负载能力、工作空间、运动性能和重复定位精度等,是远远不够的,还有许多实际问题需考虑。各性能指标间存在一定矛盾,应综合分析考虑;有的结构形式虽然有利于提高机器人性能,但工艺复杂,考虑国内加工水平,需合理选择制造工艺;样机完成后的性能测试,亦是产品开发的关键环节。相信在克服了码垛机器人开发过程中的诸多难题后,一定会出现国产的、成熟的、产业化的码垛机器人产品。
[1]李晓刚,刘晋浩.码垛机器人的研究与应用现状、问题及对策[J].包装工程,2011,(3):96-101.
[2]胡洪国,高建华,杨汝清.码垛技术综述[J].组合机床与自动化加工技术,2000,(6):7-9.
[3]孙立宁.机器人技术国内外发展状况[J].国内外机电一体化技术,2002,(4):29-41.
[4]熊有伦,丁 汉,刘恩沧.机器人学[M].北京:机械工业出版社,1993,10-28.
[5]叶 晖,管小清.工业机器人实操与应用技巧[M].北京:机械工业出版社,2010,3-14.
[6]上海ABB工程有限公司.IRB 660机器人产品手册[Z].上海:上海ABB工程有限公司,2004.
[7]库卡机器人(上海)有限公司.KR180-2系列手册[Z].上海:库卡机器人(上海)有限公司,2011.
[8]上海发那科机器人有限公司.M-410iB规格说明[Z].上海:上海发那科机器人有限公司,2007.