CO-OFDM传输系统相位噪声估计
2011-06-07王利君
王利君
(重庆邮电大学 通信与信息工程学院,重庆 400065)
0 引言
现如今OFDM技术在无线领域中已经非常成熟且得到广泛应用,已经成为一些通信领域中的标准。近几年随着高速率、大容量的通信需求和DSP芯片技术的发展,OFDM技术已经应用到光通信领域。光OFDM可以有效地抵抗光纤传输链路中颜色色散、偏振模色散等影响,并可以提高系统的频谱利用率[1]。为了适应光纤通信中长距离、大容量传输,将相干检测与OFDM技术相结合,即相干光正交频分复用(CO-OFDM)技术现以成为下一代光传输系统研究的热点。由于OFDM对载频偏移和相位噪声十分敏感,它们可以引起公共相位误差(CPE)或子载波间干扰(ICI)[2]。而在相干光通信中,相位噪声是最主要的噪声源,所以在CO-OFDM系统中相位估计十分重要。
1 CO-OFDM系统模型介绍
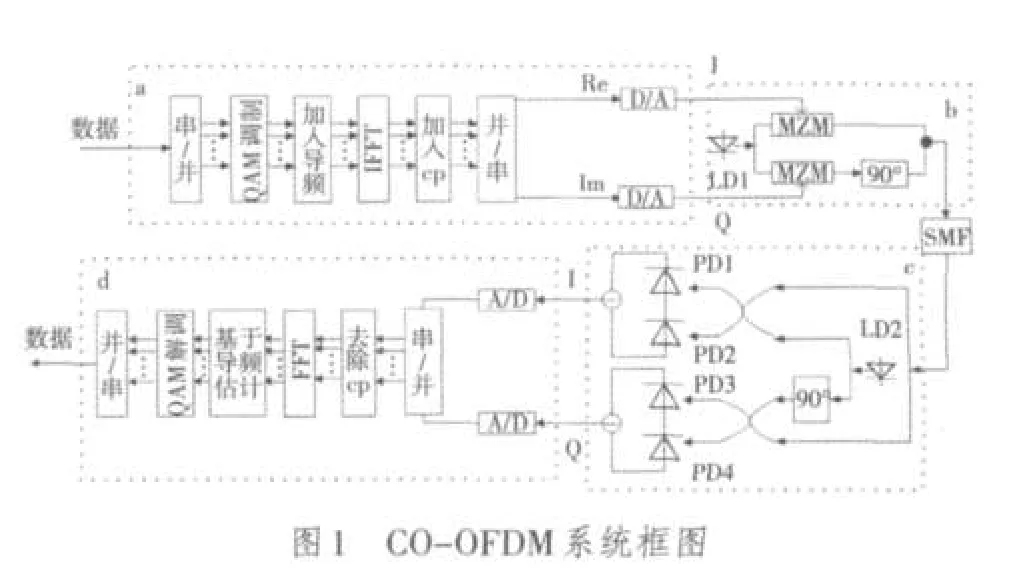
CO-OFDM系统如图1所示,该系统采用直接上/下变频,可以在发送端和接收端省去光带通滤波器[3]。
由图1可见,CO-OFDM系统由5部分组成:a部分为射频OFDM发送端(RF OFDM Transmitter);b部分为电光上变频器(RF-to-optical Upconverter),以及光纤链路标准单模光纤(SMF);c部分为光电下变频器(Opti⁃cal-to-RF Upconverter);d部分为射频OFDM接收端(RF OFDM Receiver)。基本通信过程为:首先二进制数据进入射频OFDM发送端,经过串并变换、QAM调制、添加导频、逆傅里叶变换、循环前缀添加、数模转换等处理后形成基带OFDM信号。基带OFDM信号经过电光上变频器输出光OFDM信号。经过光纤链路标准单模光纤传输到光电下变频器,光电下变频器使用两对平衡接收机进行光I/Q解调,采用相干零差检测。在射频OFDM接收端进行射频OFDM发送端的逆过程,进行基带OFDM信号处理,恢复发送端的二进制数据。
2 CO-OFDM相位估计原理
射频OFDM接收机接收到的基带OFDM信号经过FFT变换后,相位噪声由两部分组成:主要由激光器的相位偏移所引起的噪声,其次是光放大器引起的零均值高斯噪声[4]。同时激光器的相位偏移也会造成ICI,这种干扰也可以被认为是一种随机噪声,因为所有的子载波都要通过激光器。相位估计的目的就是要从接收到的含有噪声的OFDM信号中,提取相位偏移。借鉴文献[5]内容公式推导如下。
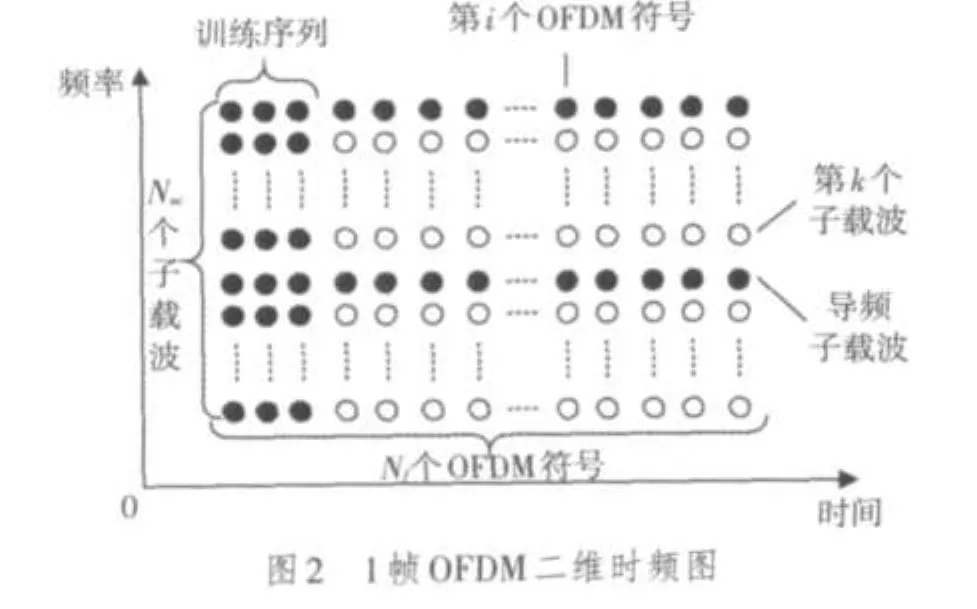
一个OFDM帧的二维时频图如图2所示,时域中Nf个OFDM符号,频域中Nsc个子载波,i表示OFDM符号下标,k表示子载波下标。
首先,由RF OFDM Transmitter发出的基带OFDM信号表达式为
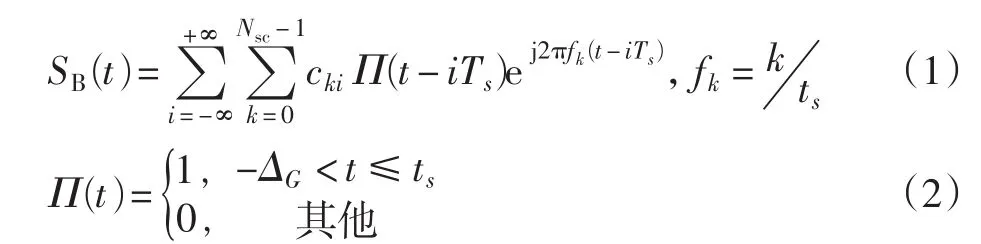
式中:cki表示第k个子载波上的第i个信息码元;fk表示子载波频率;Ts,ΔG和ts分别是OFDM符号的周期(包含循环前缀)、保护间隔长度和观察周期(即有用信号的长度),此时为了避免产生符号间干扰(ISI),保护间隔长度必须大于最大多径时延。基带OFDM信号经过电光上变频器(RTO),将基带OFDM信号调制光域变成光信号如式(3)。电光上变频器中光I/Q调制器由2对MZM组成,其分别受基带OFDM信号的实部和虚部调制。

式中:fLD1,ϕLD1分别为发射激光器LD1的频率和相位。Es(t)经过光纤链路传输到光电下变频器(OTR)变为

式中:h(t)为光纤信道脉冲响应;符号 ⊗表示卷积。Er(t)经过电光下变频器恢复为基带OFDM信号

式中:fLD2,ϕLD2分别为接收端激光器LD2的频率和相位。这里只考虑激光器相位噪声对传输性能的影响,不考虑激光器频率偏移问题,仿真中使用零差检测设置发射激光器和接收激光器频率同步。

式中:Δϕ=ϕLD1-ϕLD2,r(t)进入射频OFDM接收机,经过FFT变换为

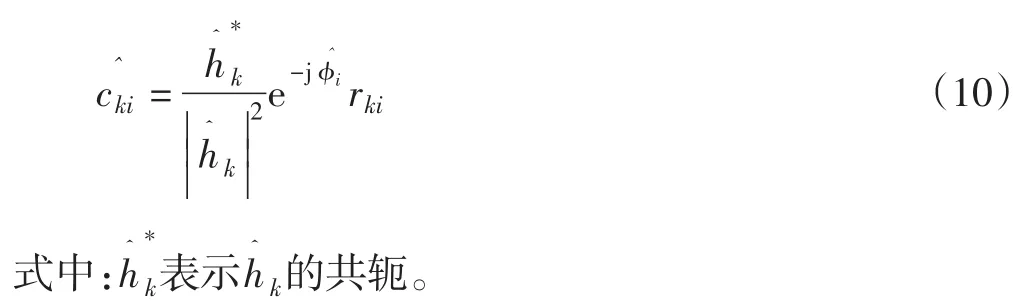
式中:rki为接收到的信息符号;ϕi为公共相位误差(CPE)由激光器相位偏移引起;cki为发送端的信息符号;hk为频域信道传输函数;nki为高斯噪声。在公式(7)中,第i个OFDM符号中对于所有子载波中的相位偏移ϕi是相同的,可以通过相位估计补偿相位偏移。信道传输函数hk在光纤中变化非常缓慢,可以认为在一帧OFDM符号中是不变的。可以通过基于频域导频的方法进行信道估计确定其值。
相位估计的方法有很多,如基于数据子载波、最大似然法[6]、导频子载波等。由于相位模糊采用数据子载波法在强相位噪声情况下进行相位估计容易引起更大的相位估计误差[4];最大似然法复杂度高,在高速光通信中不易实现;而基于导频子载波的相位估计是一种基本的相位估计方法。如图2所示梳状导频结构,ϕi的相位估计值为


3 仿真与结果分析
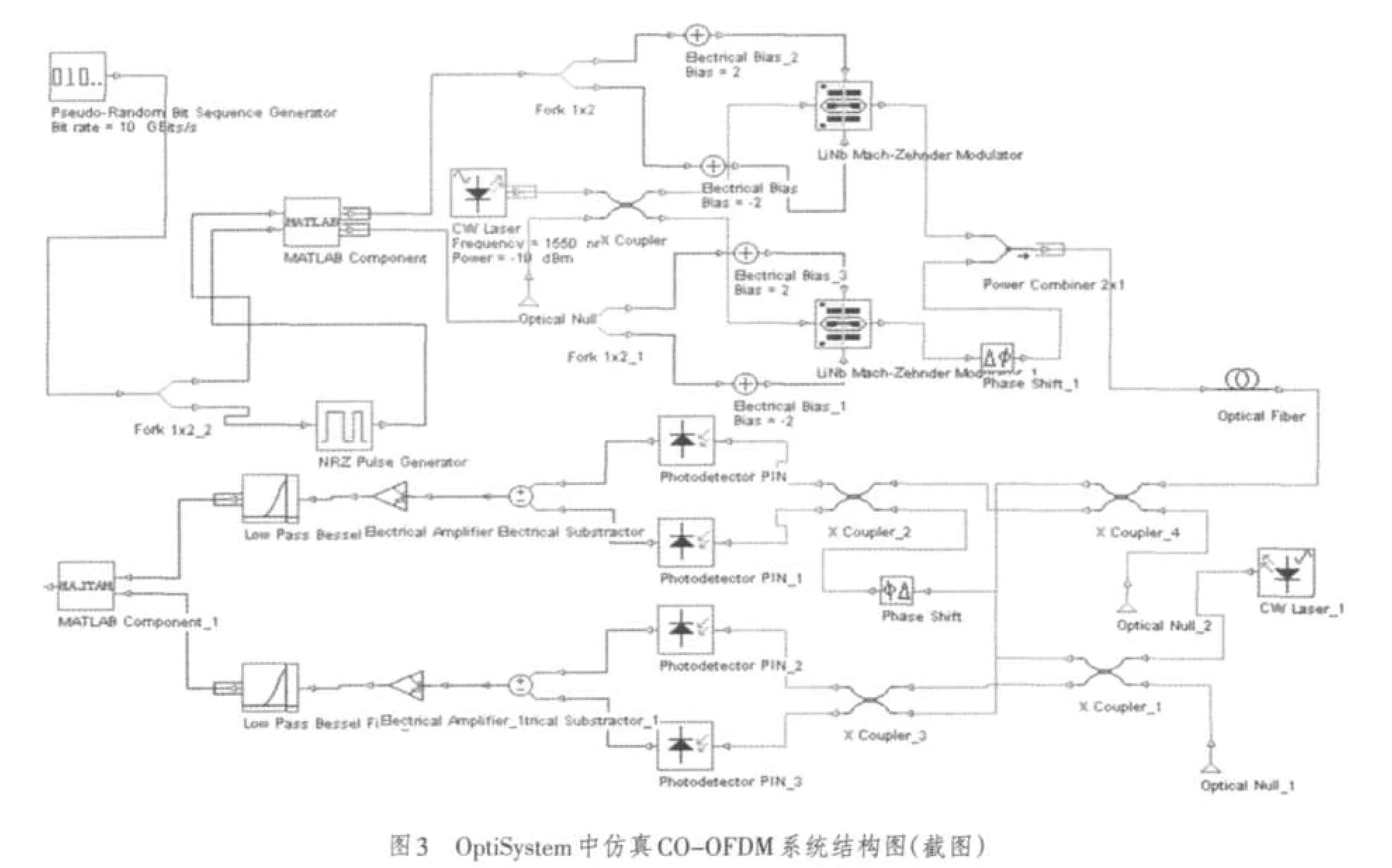
本系统采用Matlab和OptiSystem软件相结合搭建CO-OFDM仿真系统如图3所示。射频OFDM发送端和接收端采用Matlab软件仿真,光域器件由OptiSystem器件库获得。仿真参数如下:采用16QAM调制,IFFT点数256,有效子载波个数128,循环前缀个数32。一帧OFDM符号数32,其中前4个为训练序列。根据文献[4],采用5个梳状导频进行相位估计。激光器采用连续波激光器(CW Laser),线宽100 kHz,频率193.4 THz,为了避免光纤的非线性,发射功率限制在-10 dBm,光调制器采用LiNbO3 M-Z调制器,采用PIN二级管光电探测器,采用标准单模光纤,光纤衰减系数为0.2 dB/km,色散系数16.7(ps·nm-1·km-1),不考虑光纤的PMD影响,二进制序列传输速率10 Gbit/s。为了说明激光器是主要相位噪声源和简化实验过程,这里不考虑光放大器噪声,所以在光纤链路中没有加入光放大器。
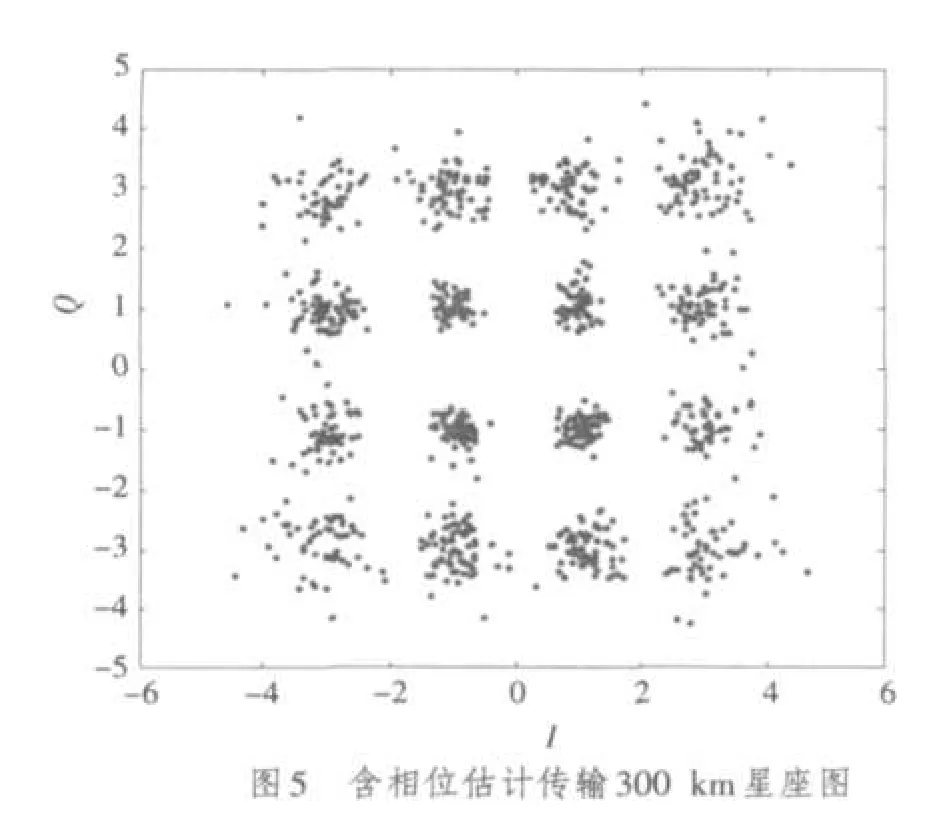
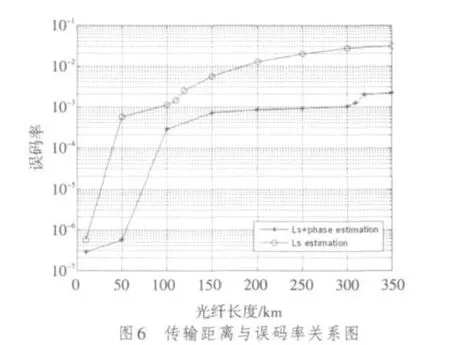
在传输32个OFDM符号经过300 km传输距离后,接收端数字调制星座图如图4和图5所示。在只有最小二乘(LS)信道估计的接收端星座图(见图4)模糊不清,星座图有些旋转,某些映射点严重发散,这是由于子载波发生相位偏移,而没有得到相位补偿,而图5星座图清晰可见。两种信道估计方法传输距离和误码率比较关系如图6所示,从图中可以看出,在误码率达到10-3情况下,信道传输函数估计和相位估计的传输系统可以传输300 km,而在只用信道传输函数估计的传输系统下只能传输100 km。

4 结论
与无线OFDM传输系统相比,光OFDM传输系统信道变化缓慢,所以光OFDM信道估计的主要任务已不是确定传输函数,而是相位估计。尤其在相干光系统中激光器的相位噪声是系统主要噪声源,所以CO-OFDM相位估计变得尤为重要。本文从理论上分析了相位噪声的影响,并提出一种基于导频子载波的相位估计方法,仿真表明该方法可以有效提高系统传输性能。
[1]SHIEH W,BAO H,TANG Y.Coherent optical OFDM:theory and design.[J].Optics Express,2008,16(2):842-859.
[2]ARMADA A G.Understanding the effects of phase noise in orthogonal frequency division multiplexing[J].IEEE Transactions on Broadcasting,2001,47(2):153-159.
[3]TANG Y,SHIEH W,YI X,et al.Optimum design for RF-to-optical up-converter in coherent optical OFDM systems[J].IEEE Photonics Technology Letters,2007,19(7):483-485.
[4]YI X,SHIEH W,TANG Y.Phase estimation for coherent optical OFDM[J].IEEE Photonics Technology Letters,2007,19(12):919-921.
[5]SHIEH W,YI X,MA Y,et al.Coherent optical OFDM:has its time come[J].Optics Express,2008,16(2):234-254.
[6]SHIEH W.Maximum-likelihood phase and channel estimation for coherent optical OFDM[J].IEEE Photonics Technology Letters,2008,20(8):605-607.
