半周期电流滞环控制的二极管钳位型三电平半桥逆变器
2011-06-06陈小刚王慧贞
陈小刚 王慧贞
(南京航空航天大学航空电源重点实验室 南京 210016)
1 引言
自从Akira Nabae教授于1981年提出了中点钳位三电平逆变器的拓扑以来[1],多电平逆变器的拓扑结构和控制方法成为国内外学者的研究热点。而二极管钳位型三电平逆变器因其结构及控制简单、开关管电压应力低、输出谐波含量低和EMI小等优点在中高压应用场合[2-3]受到研究者的青睐。在控制方案上,文献[4-7]基于减小开关次数、提高系统效率、实现中点电位平衡、提高直流电压利用率等,对三电平逆变器的控制方法进行了深入的研究。但由于传统桥式电路固有的直通问题,这些方案均需在控制上加入死区时间,增加了桥臂输出电压的谐波[8],进而会造成波形畸变及一定程度上的基波损失[9]。文献[10]在两电平双Buck逆变器电路中提出了一种电流半周期控制模式,并结合三态滞环控制方法成功将这一电流控制模式应用在三电平双Buck逆变器中[11],但该逆变电路拓扑结构复杂,需要两个滤波电感,另需两个续流二极管,而且其电压应力为输入直流电源电压。
图1为单相二极管钳位型三电平半桥逆变器(Diode-Clamped Three-Level Half Bridge Inverter,DCTLHBI)的主电路拓扑,S1~S4为主功率开关管,VDS1~VDS4为其对应的体二极管,C1、C2为直流侧分压电容,VD1、VD2为钳位二极管,桥臂电压VA经电感L和电容Cf滤波后得到正弦波电压vo。本文旨在将半周期电流控制模式以及双滞环电流控制方法结合应用在如图1所示单相DCTLHBI中,在保留三电平电路优点的同时,实现整个控制周期内无死区运行。

图1 二极管钳位型三电平半桥逆变器拓扑Fig.1 Diode-clamped three level half bridge inverter
2 电路的工作原理分析及其特点
2.1 工作模态分析
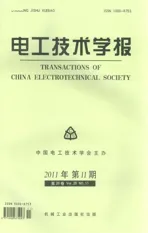
工作在半周期电流控制模式的DCTLHBI的基本思想为:在输出滤波电感电流大于零的半个周期,控制图1中上桥臂的两个开关管,下桥臂的两个开关管关断;在输出滤波电感电流小于零的半个周期,控制下桥臂的两个开关管,同时上桥臂的两个开关管关断,以实现三电平运行。半周期工作下理想输出波形如图2所示。表1为半周期运行的DCTLHBI在四个工作区内的工作模态分配表:
Ⅰ区:iL>0,vo<0,M1桥臂输出“0”电平,iL在“-vo”作用下上升;M2桥臂输出“-Vin/2”电平,iL在“-vo-Vin/2”作用下通过VDS3、VDS4下降。
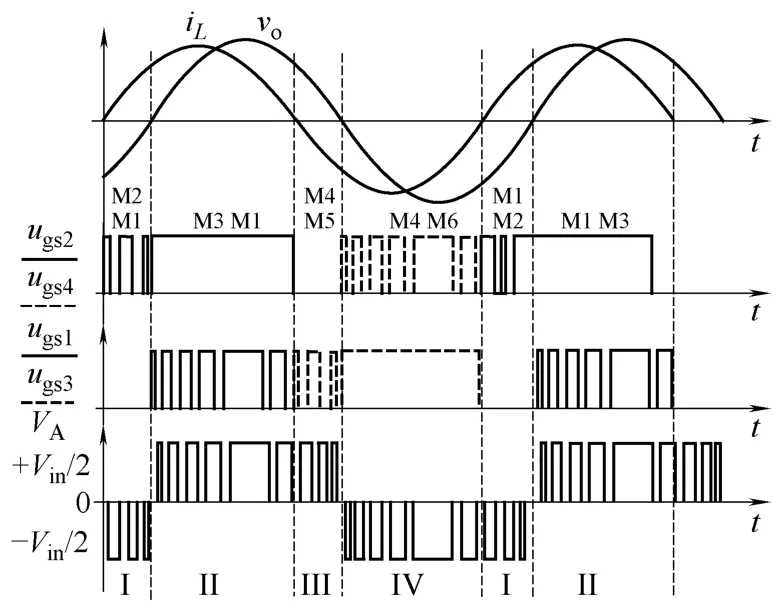
图2 半周期运行模式波形示意Fig.2 Ideal waveforms of half cycle mode
Ⅱ区:iL>0,vo>0,M1桥臂输出“0”电平,iL在“-vo”作用下下降;M3桥臂输出“+Vin/2”电平,iL在“Vin/2-vo”的作用下上升。
Ⅲ区:iL<0,vo>0,M4桥臂输出“0”电平,iL在“-vo”作用下增加;M5桥臂输出“+Vin/2”电平,iL在“Vin/2-vo”作用下通过VDS1、VDS2减小。
Ⅳ区:iL<0,vo<0,M4桥臂输出电平“0”,iL在“-vo”作用下减小;M6桥臂输出电平“-Vin/2”,iL在“-vo-Vin/2”作用下增加。

表1 半周期运行时的工作模态分配表Tab.1 The switching modes distribution of half cycle control mode
在一个开关周期T内,vo近似恒定不变,由图2可以看出,任意相邻两个模态桥臂输出电压幅值分别为“Vin/2”电平和“0”电平,假设“Vin/2”电平持续时间t1,“0”电平持续时间t2,电感电流纹波ΔI。则输出“Vin/2”电平时,iL的变化率为

输出“0”电平时,iL的变化率为

综上所述,iL>0的半个周期,即在工作区Ⅰ、Ⅱ里,控制S1、S2的通断,M1、M2、M3之间交替工作;iL<0的半个周期,即在工作区Ⅲ、Ⅳ里,控制S3、S4的通断,M4、M5、M6之间交替工作。从而实现DCTLHBI半周期电流控制模式工作。
图3所示为四个工作区的工作模态。
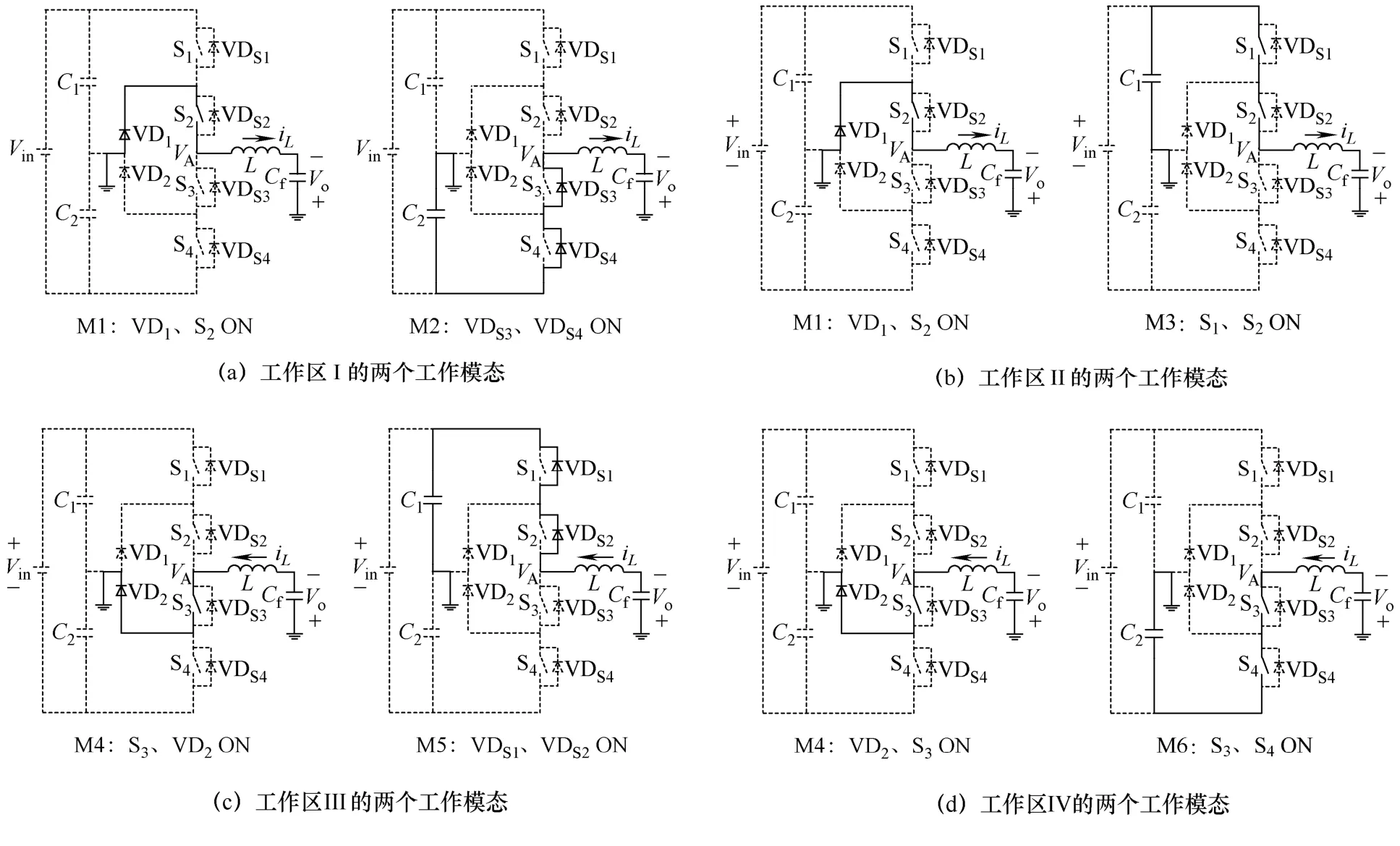
图3 工作模态Fig.3 Operation modes
2.2 双环宽滞环控制方案
逆变器的系统特性很大程度上取决于控制策略的优劣。在众多电流控制方案中,滞环电流控制因其自动峰值电流限制、电路实现简单、优越的动态响应及无条件稳定等优点[12]而被应用于逆变器的控制方案中。多电平逆变器中,文献[13-16]提出了多种滞环控制方案,文献[14]采用多个滞环基准实现三电平逆变器滞环电流控制,文献[11]将三态电流滞环控制方法成功应用在三电平双Buck逆变器中,本文将半周期电流控制模式结合双滞环控制方法应用于传统的DCTLHBI,控制框图如图4所示。在半周期运行模式时,iL过零时出现的断续状态使得iL极性的检测信号不准确,从而在实际工作时用电流的基准信号来代替iL,以此来判断电流的正负半个周期。在图4中,输出电压与给定的电压基准经过电压调节器,得到的输出信号即为电流的基准ue,电感电流与其基准的误差信号iL-ue同时与所设的大小两个环宽比较:大环宽用来判断输出电压的极性,电流环的基准ue的极性用来判断iL的极性,以此确定当前的工作区;小环宽用来限制电感电流的纹波,产生PWM驱动,用来选择切换某个工作区内的两个模态,以此确定当前的工作模态。

图4 DCTLHBI半周期电流双滞环控制框图Fig.4 Control scheme of DCTLHBI with half cycle hysteresis current control
在双滞环控制方案中,小环宽的选取直接影响到输出电流的跟踪特性和开关频率,从而影响到系统特性。设电流反馈系数为Kif,则电流iL纹波ΔI与小环宽h1的关系为

由式(1)和式(3)可得“±Vin/2”电平持续时间

由式(2)和式(3)可得“0”电平持续时间

由式(4)和式(5)可得开关频率

式(6)在|vo|=vin/4时取得最大值

小环宽取得过大,开关频率相对减小,但iL纹波增大,轻载时,电感电流断续工作的时间增多,特别是在ue和vo极性相反的Ⅰ和Ⅲ工作区,断续状态下较小的反相振荡电流会在上下桥臂体二极管之间切换,桥臂电压会出现振荡,如图5a所示,增加桥臂谐波。小环宽选取得过小,iL纹波减小,但由式(6)和式(7)可知在整个周期内增加了开关频率。

图5 大小环宽的选取对输出波形的影响Fig.5 The impact of hysteresis bands on VA
如前所述,大环宽的作用是用来判断输出电压极性。图6为DCTLHBI在半周期电流双滞环控制模式下工作模态之间的切换示意图。±h2和±h1分别为所设的大小环宽。以电压由正过零变负为例:vo很小,M4状态中iL在“-vo”的作用下变化缓慢,误差信号iL-ue不降反升,达到+h2后,选择vo<0的Ⅳ区模态工作,同样,很小的vo使得M4模态的iL上升缓慢,iL-ue不升反降,达到-h2,这一过程iL一直给输出滤波电容充电,直到完全工作在Ⅳ区,如图5b所示。由此可见,大环宽选取得过小,则在电压过零时输出电压出现几次三个电平交替的情况,会增加输出电压谐波,大环宽选取得过大,则vo过零时电流脉动较大,输出“0”电平模态持续时间太长也会增加输出电压的谐波。综上所述,两个环宽大小的选取要综合考虑其对输出电压谐波的影响及开关频率等因素。

图6 工作在半周期电流滞环控制模式下工作模态切换图Fig.6 Alternating of operation modes in DCTLHBI with half cycle hysteresis current control
3 无死区运行的控制策略
在传统的桥式电路中,为防止上下桥臂功率开关管在开关过程中同时导通,需要在驱动中加入死区时间。死区时间内桥臂输出电平的极性与电流的流向有关,桥臂输出电平不是理想的SPWM波,从而增大了输出电压谐波,并会引起一定程度上的基波损失[9],谐波含量的理论计算也因此更加复杂。在DCTLHBI中,如图1所示,为防止直通,应避免以下三种情况:①四个开关管同时导通。②S1、S2、S3同时导通。③S2、S3、S4同时导通。从图3的开关模态中可以看出,即要避免M3与M6、M3与M4、M1与M6之间的切换。
在工作区Ⅰ和Ⅱ里,只控制S1和S2的驱动信号,即只有M1和M2、M1和M3的相互切换,故无需加入死区时间;同理,在Ⅲ和Ⅳ工作区内开关模态的相互切换时亦是如此。
半周期电流双滞环控制DCTLHBI的工作模态中,iL-ue与±h1比较产生PWM信号,若前一时刻达到+h1,则选择使iL-ue下降的模态,即Ⅰ区的M2、Ⅱ区的M1、Ⅲ区的M4以及Ⅳ区M6。同样地,若前一时刻达到-h1,则选择对应的另外几个模态,再根据大环宽和ue确定的工作区来选择当前的工作模态。这样,在工作区Ⅱ向工作区Ⅲ过渡,iL由正变负,vo>0,工作区Ⅱ是M1、M3交替工作,在ue过零前,电路工作在断续状态,M1模态使得iL正向减小到零,当ue很小时,iL-ue不能达到小环宽-h1,这一模态不会改变,电流产生过零振荡并持续到ue过零而进入工作区Ⅲ,选择使iL-ue继续下降达到-h1的M4模态。这样,在电流过零时是模态M1(S2ON)和模态M4(S3ON)之间的切换,不需要加入死区时间。同理,在由工作区Ⅳ向工作区I切换时,是由M4模态向M1模态切换,也不需要加入死区时间。可见整个工作周期里均不存在前述三种直通情况,可以实现控制上的无死区运行。
4 仿真和实验结果
运用Saber软件对工作在半周期电流双滞环控制模式下的DCTLHBI进行了仿真。同时在此基础上制作了一台1kW的原理样机。参数为:Vin=DC670V,Vo=AC220V,f=50Hz,滤波电感L=400μH,滤波电容Cf=14.7μF,额定输出功率Po=1kW,开关管选用IRFP460。图7给出了空载和阻性满载时仿真的关键波形,可以看出桥臂输出三电平电压,开关管S1、S2和钳位二极管VD1电压应力为输入侧电容电压,空载电流过零时,电感电流工作在断续状态,此时桥臂电压会产生振荡。满载时,桥臂输出电压为质量很好的单极性调制波,输入侧直流电容电压的基频脉动,反映在了S1、S2及VD1电压应力上。如前所述,运行在半周期控制模式下的DCTLHBI在控制中不用加入死区时间,从而不存在传统桥式拓扑控制中加入的死区时间对桥臂电压的影响,其输出电压的谐波会进一步减小。同时采用的滞环电流控制把输出滤波电感电流纹波固定在大小环宽以内跟踪其基准,整个电路的动态响应快,稳定性好。图8a和图8b分别为空载和阻性满载时的实验波形,验证了半周期电流双滞环控制工作模式下单相DCTLHBI的可行性。可以看出,实验结果与仿真基本吻合,内管S2由于线路寄生参数的影响会略有尖峰,同时表2给出了相关的实验数据。可见,输出电压波形质量很好,THD从空载到满载均在0.5%以下,主电路的效率从半载到满载维持在98%以上。

图7 关键波形仿真Fig.7 Simulation waveforms

图8 实验波形Fig.8 Experimental wavefoms
表2 实验数据Tab.2 Experiment data
5 结论
本文对传统的二极管钳位型三电平半桥电路采用一种半周期电流双滞环控制方法,该逆变器具有以下特点:①桥臂输出电压为三电平调制波,整个控制电路中不用加入死区时间,进一步减小了输出谐波含量。②每个功率管的电压应力均能直接或间接钳位在输入侧电容电压。③采用双滞环实现方法,控制简单可靠,提高了系统的动态响应性能及稳定性。运用Saber软件及通过一台1kW原理样机验证了该工作模式下二极管钳位型三电平半桥逆变器的优良性能。
[1] Akira Nabae,Isao Takahashi,Hirofumi Akagi.A new neutral point clamped PWM inverter[J].IEEE Transactions on Industry Applications,1981,17(5):518-523.
[2] Klabunde M C,Zhao Yifan,Lipo T A.Current control of a 3-level rectifier/inverter drive system[J].IEEE Transactions on Power Electronics,1996,11(1): 57-65.
[3] Ainsworth J D,Davies M,Fitz P J,et al.Static var compensator(STATCOM) based on single phase chain circuit converters[J].IEE Proceedings Generation Transmission and Distribution 1998,145(4):329-336.
[4] Kim,Seo B S,Hyun D S.A new N-level high voltage inversion system[C].Proceedings of the IEEE Annual Conference of the Industrial Electronics Society 1993:901-908.
[5] 吴洪洋,何湘宁.多电平载波PWM控制与SVPWM控制方法之间的本质联系及其应用[J].中国电机工程学报,2002,22(5): 10-15.Wu Hongyang,He Xiangning.Relationship between multilevel carrier-based PWM and SVPWM and its applications[J].Proceedings of the CSEE,2002,22(5):10-15.
[6] Liu Hyo L,Gyu H Cho,Sun S Park.Optimal PWM design for high power three-level inverter through comparative studies[J].IEEE Transactions on Power Electronics,1995,10(1): 38-47.
[7] 姚文熙,吕征宇,费万民.一种新的三电平中点电位滞环控制法[J].中国电机工程学报,2005,25(7):92-96.Yao Wenxi,Lü Zhengyu,Fei Wanming.A new three-level neutral point potential hysteresis-band control[J].Proceedings of the CSEE,2005,25(7):92-96.
[8] Zhou Dongshen,Didier G Rouaud.Dead-time effect and compensations of three level neutral point clamp inverters for high performance drive applications[J].IEEE Transactions on Power Electronics,1999,4(14):782-788.
[9] Evans P D,Close P R.Harmonic distortion in PWM inverter output waveforms[J].IEE Proceedings Electric Power Applications,1987,134(4): 224-232.
[10] 洪峰,刘军.滞环电流控制型双buck逆变器[J].电工技术学报,2004,19(8): 73-77.Hong Feng,Liu Jun.Hysteresis current controled dual buck half bridge inverter[J].Transactions of China Electrotechnical Society,2004,19(8): 73-77.
[11] 王慧贞,蔡兆奇.三电平双降压式半桥逆变器[J].电工技术学报,2009,24(2): 73-77.Wang Huizhen,Cai Zhaoqi.Three level dual buck half bridge inverter[J].Transactions of China Electrotechnical Society,2009,24(2): 73-77.
[12] Bode G H,Holmes D G.Implementation of three level hysteresis current control for a single phase voltage source inverter[C].Proceedings of the IEEE Power Electronics Specialist Conference,2000: 33-38.
[13] Luigi Malesani,Paolo Tenti.A novel hysteresis control method for current controlled VSI PWM inverters with constant modulation frequency[J].IEEE Transactions on Industry Application,1990,26(1): 88-92.
[14] Lafoz M,Iglesias I J,Veganzones C,et al.A novel double hysteresis band current control for a threelevel voltage source inverter[C].Proceedings of the IEEE Power Electronics Specialist Conference,2000:21-26.
[15] Lafoz M,Iglesias I J,Portillo S.Experimental results of a three-level voltage source inverter with hysteresis-band current control and hybrid PWMSVM voltage control[C].Proceedings of the IEEE 34th Annual Power Electronies Specialist Conference,2003,1: 183-188.
[16] Firuz Zare,Gerard Ledwich.A hysteresis current control for single-phase multilevel voltage source inverters: PLD implementation[J].IEEE Transactions on Power Electronics,2002,17(5): 731-738.