永磁同步电机转子位置求取方法
2011-06-02左月飞
李 豹, 左月飞
(南京航空航天大学自动化学院,江苏南京 210016)
0 引言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)在转子处装有高能永磁体,因而具有高推力、低损耗、小电气时间常数、响应快等特点。它所构成的伺服传动系统消除了传统伺服系统由旋转运动到直线运动的机械传动链影响,成为高精度、微进给系统中最佳执行机构。因此,永磁同步伺服驱动已成为国内外伺服技术领域内研究和开发的热点。目前,PMSM伺服传动系统广泛采用矢量变换控制方法进行变频调速,而矢量变换控制要求实时检测电机的转子位置信息以用于坐标变换,转子位置信息检测不准确就难以确定定子绕组的控制状态,电机就可能发生速度振荡甚至失步,更谈不上实现高精度位置伺服控制。通常有两种方法检测转子位置。其一为采用无位置传感器技术,如利用电机绕组中相关电信号通过适当算法估计出转子位置和速度,由以软件实现的磁链观测器取代位置传感器来获取转子位置信息。无位置传感器技术能够节省成本,但是转子位置信息的获取容易受外界干扰。其二为采用位置传感器技术,如光电编码器、旋转变压器等,常用的位置传感器主要有增量式和绝对式两种。本文以绝对式旋转变压器为例,对确定转子位置的直流定位法进行详细分析,并通过试验验证了该方法的可行性。
1 直流定位法理论分析
PMSM矢量变换控制中Park变换和Ipark变换的转子位置角θ为转子磁场轴线(转子d轴)与A相绕组轴线之间的夹角,它可通过转子磁场在定子绕组中产生的感应电动势波形来确定。因为感应电动势的波形确定了转子d轴与A相绕组轴线之间的对应关系,利用绝对式旋转变压器实时采集转子绝对位置的特性,经过简单计算即可得到转子位置角。
直流定位法可简单概述为给电机定子三相绕组中的两相通入直流电,借助于转子永磁磁极使电机停留在某一特殊位置,进而确定转子位置角。
使用直流定位法主要用到的器件有:直流电源、数字信号处理器(Digital Siginal Processor,DSP)、绝对式旋转变压器、解码模块。假设解码模块的输出为13位,相应的输出最大值为213-1。旋转变压器采集的位置信号经过解码后送入DSP处理。电机正转时A相绕组反电势与解码后位置信号的关系如图1所示。
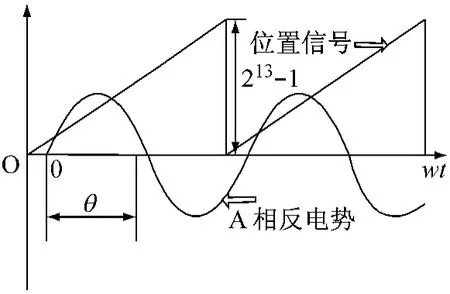
图1 解码后位置信号与A相绕组反电势关系
图1中θ为转子位置角,由于DSP中矢量变换时利用查表的方式计算θ的正余弦值,因此其取值范围为0≤θ≤360°。
当DSP、解码模块等正常运行后,给电机定子三相绕组的A相和B相通入合适大小的直流电,其中A相绕组为输入,B相绕组为输出。电机定子形成方向固定的磁场,与转子磁场相互作用将使转子停留在330°电角度方向,如图2所示。
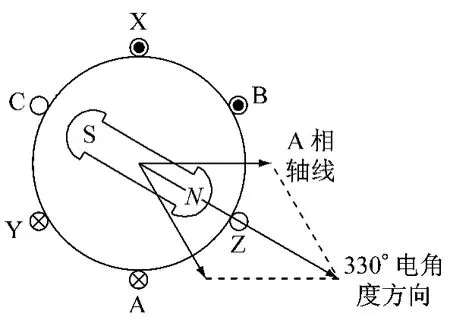
图2 通直流电后PMSM结构简图
由此可得330°电角度时对应的DSP输出的位置信号A,330°电角度位置信号与A相绕组反电势关系如图3所示。
图3中X为转子位置角θ对应的DSP输出值;A为330°电角度对应的DSP输出值;结合图3中的几何关系可得:

式中:P——电机的极对数。
根据式(1)可最终得到转子位置的计算公式:

实际应用时为减小DSP的计算量可将式(2)简化为

式(3)中:
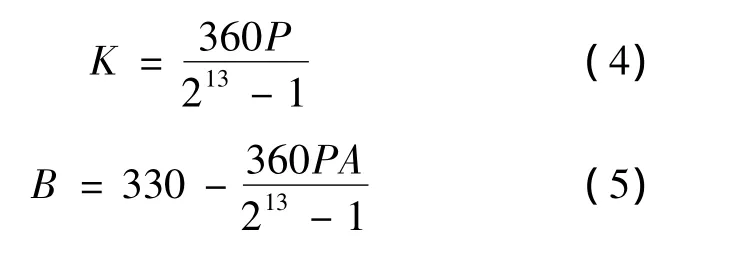
由于 θ的取值范围为 0≤θ≤360°,因此式(3)应转换为

式中:N——整数。
另外,当电机定子绕组中直流电的通电顺序为B相绕组输入,A相绕组输出时,电机转子将停留在150°电角度方向,转子位置角计算公式为

实际应用中也可以给B相绕组和C相绕组通入直流电,只是电机转子的定位不同而已,在此不再叙述,读者可自行分析。
2 试验验证
试验条件如下:3 kW的PMSM,电机极对数P=4,电机处于空载状态,定子电枢电阻为0.061 742 2 Ω,电机的转动惯量 J=0.002 162 06 kg·m2,解码模块型号为13XSZ12A1-S08-06-T7,DSP选用TI公司C2000系列的TMS320F2812。
鉴于定子绕组电阻较小,并且空载,因此只要通入稍低的直流电即可,选择通入10 V直流电,其中A相为输入,B相为输出。当电机停留在330°电角度时对应的位置信号值为7 290,将以上数据代入式(4)~式(6)得到转子位置的计算公式及其相关系数:
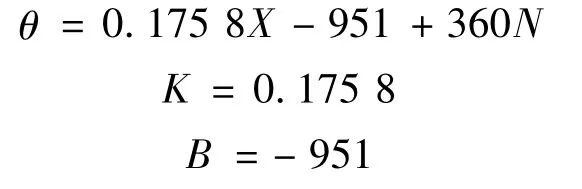
将上述计算结果代入程序并且添加θ是否处于0°~360°的判断语句。起动电机,系统能够正常运行,试验验证正确。
3 结语
本文研究了一种基于绝对式位置传感器求取PMSM转子位置角的方法。该方法利用PMSM转子装有永磁磁极的特性,使电机转子固定在某一特定位置,通过读取特定方位的位置信号数值求得电机转子位置角。求取特定方位的位置信号数值时电机应处于空载或轻微带载,若电机负载过大,由于负载转矩的存在使得通入直流电后电机不能停留在期望的方位,也就不能正确读取该方位对应的位置数值,进而影响后续转子位置角的计算。应用该方法时能够实时计算转子的绝对位置,计算量小,易于理解,倾向于工程实践,实用价值高,且无须检测转子的初始位置角,角度计算的准确度高。
[1]谢宝昌,任永德.电机的DSP控制技术及其应用[M].北京:北京航空航天大学出版社,2005.
[2]苏奎峰,吕强,常天庆,等.TMS320281xDSP原理及C语言程序开发[M].北京:北京航空航天大学出版社,2008.
[3]尚喆.永磁同步电动机磁场定向控制的研究[D].杭州:浙江大学,2007.
[4]徐书凯.中、大功率EMA伺服控制技术与动态性能研究[D].南京:南京航空航天大学,2009.
[5]吴红星,洪俊杰,李立毅.基于旋转变压器的电动机转子位置检测研究[J].微电机,2008,1(3):1-3.
