基于场效应管的大功率直流电机驱动电路设计
2011-06-02胡发焕邱小童蔡咸健
胡发焕, 邱小童, 蔡咸健
(1.江西理工大学机电工程学院,江西赣州 341000;2.江西理工大学应用科学学院,江西赣州 341000)
0 引言
长期以来,直流电机以其良好的线性特性、优异的控制性能等特点成为多数变速运动控制和闭环伺服控制系统的理想选择。随着计算机在控制领域、高频开关技术、全控型第二代电力半导体器件(GTR、GTO、MOSFET等)的发展,及脉宽调制(Pulse Width Modulation,PWM)直流调速技术的应用,直流电机得到广泛应用。为适应小型直流电机的使用需求,各半导体厂商推出了直流电机控制专用集成电路,构成基于微程序控制器(Microprogrammed Control Unit,MCU)控制的直流电机伺服系统。这种集成电路的优点是集成化,外围电路简单,使用方便。但该电路也存在重大的不足:输出功率有限,不满足大功率场合的需求;由于采用了电荷泵电路,它必须采用PWM信号驱动,且PWM的频率和占空比有一定的限制;没有光电隔离电路,当驱动电路发生击穿等故障时会损坏与之相连的MCU等元件。以SANYO公司生产的STK6875芯片[1]为例,它的所需电压为12~42 V,最大持续电流为5 A,所需PWM频率为1~30 kHz。经过测试,当PWM占空比超过0.85或频率低于1 kHz时,其性能显著下降,芯片发热严重。该类芯片驱动信号的频率和占空比的局限性,使其性能受到很大限制。针对以上不足,利用功率场效应管和光电隔离器设计了大功率直流电机驱动电路,该电路耐压50 V,驱动电流达30 A,PWM占空比可以在0~1之间调节,具有快速、精确、稳定且有电气隔离等优点,可直接与MCU连接,用PWM技术实现直流电机平稳调速控制。
1 直流电机驱动电路总体结构
直流电机驱动电路由电机驱动逻辑电路、光电隔离电路、驱动信号放大电路、H桥功率驱动电路等4部分组成,如图1所示。电机驱动电路的主要控制信号有电机转向控制信号Dir、电机转速控制信号PWM。Uc1为驱动逻辑电路电源,Uc2为电机驱动电源。设计的电路中,逻辑电路与驱动放大电路进行电气隔离,消除了驱动电路对前级电路的干扰,逻辑运算后的控制信号通过光电隔离和放大后,驱动H桥上下桥臂,实现对电机的控制。
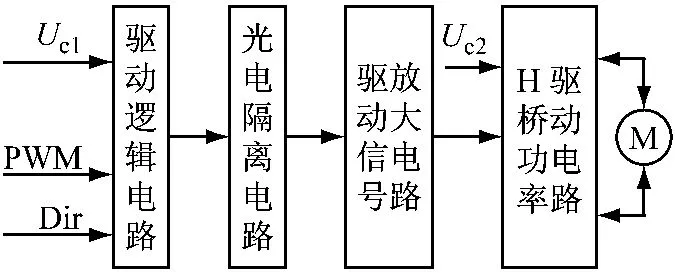
图1 驱动控制电路框图
2 H桥功率驱动器原理
直流电机驱动使用最广泛的是H型全桥式电路,这种驱动电路能方便地实现电机的四象限运行,即正转、正转制动、反转、反转制动。H桥功率驱动原理图如图2所示,组成H桥驱动电路的4只开关管工作在开关状态,S1、S4为一组,S2、S3为一组,这两组状态为互补。当S1、S4导通时,S2、S3截止,电机两端加正向电压实现电机的正转或反转制动;反之亦然,实现电机反转或正转制动。实际控制中,电机可以在四个象限之间切换运行。在各种开关元件中,功率场效应管是压控元件,具有输入阻抗大、开关速度快、无二次击穿等特点,能满足高速开关动作的需求,因此常用功率场效应管为H桥的开关元。H桥电路中的4个场效应管可以分别采用N沟道型和P沟道型,P沟道用于上桥臂,N沟道用于下桥臂。下面分析功率场效应管的开关过程。

图2 H桥功率驱动电路框图
3 感性负载下的功率场效应管开关过程
电动机是典型的感性负载,具有感性负载的开关电路如图3所示。假设驱动信号Ug为理想方波信号,Rg为驱动信号内阻,Cgd,Cgs,Cds为各极的寄生电容,L0为电动机的电感量,R0为其内阻,D0为续流二极管。
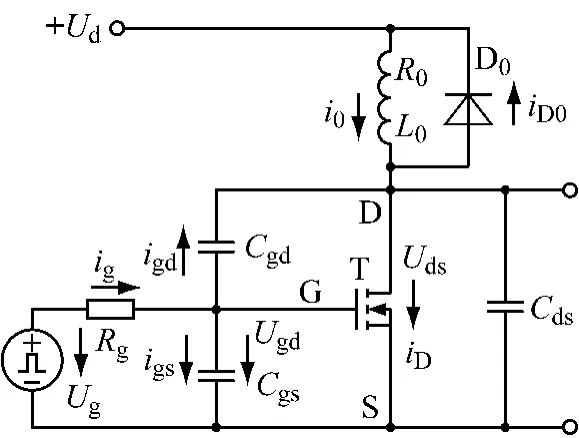
图3 功率场效应管开关电路图
3.1 功率场效应管的导通过程分析
场效应管导通前,假设场效应管处于截止状态,t0时 Ug=0,在 t0+时,Ug=0阶跃为 Ug=Ug1,则寄生电容Cgd、Cgs被正向充电,门极电压Ugs可表示为 Ugs=Ug1·e-t/τ,其中 τ=Rg(Cgs+Cgd),当Ugs=UT(场效应管的导通电压)时,场效应管开始导通[2],由此可以得出:

式(1)表明:增大Ug1或减小τ可以缩短场效应管导通延迟时间td(on)。
3.2 功率场效应管的截止过程分析
场效应管截止前,假设场效应管处于饱和导通状态,t0时Ug=Ug1,在t0+时,Ug突降为0,则寄生电容 Cgd、Cgs被反向充电[3],栅电压下降,门极电压Ugs可以表示为Ugs=-ig·Rg=-Rg(Cgs+Cgd)·dUgs/dt,因为 Ugs(0)=Ug1,故:Ugs=Ug1e-t/τ,其中 τ=Rg(Cgs+Cgd)。当 t=td(off)时,有Ugs=IDsat/Gm+UT,(UT为场效应管导通电压),则:

式中:IDsat——漏极饱和电流;
Gm——功率场效应管的直流跨导。
由式(2)可得出:减小Ug1或τ可以缩短场效应管截止延迟时间td(off)。
4 驱动电路的设计
根据功率场效应管的特性和电气隔离的要求,设计了大功率直流电机驱动电路。驱动电路的输入端和MCU连接,输入信号有两个:PWM和Dir。PWM信号用于控制电机的转速;Dir为0或1,用于控制电机的转向。输出端和电动机相连。整个电路分为电机驱动逻辑电路、光电隔离电路、驱动信号放大电路、H桥功率驱动电路等4部分。
4.1 电机驱动逻辑电路设计
电机驱动逻辑电路如图4所示,MCU送来控制信号PWM和Dir,经非运算和与运算后输出两组信号:A1、B1和 A2、B2。现分析其工作过程:PWM输入矩形脉冲信号,设Dir输入为1,则经过非门和与运算后输出两组信号,第一组信号的A1电平为0,B1端的波形与输入PWM波形的相位相反,频率相等;第二组信号A2、B2电平均为1。同理,当Dir输入为0时,A1和B1电平为1,A2电平为0,B2的波形与PWM频率相等而相位相反。逻辑电路输出的两组信号驱动光电隔离电路。
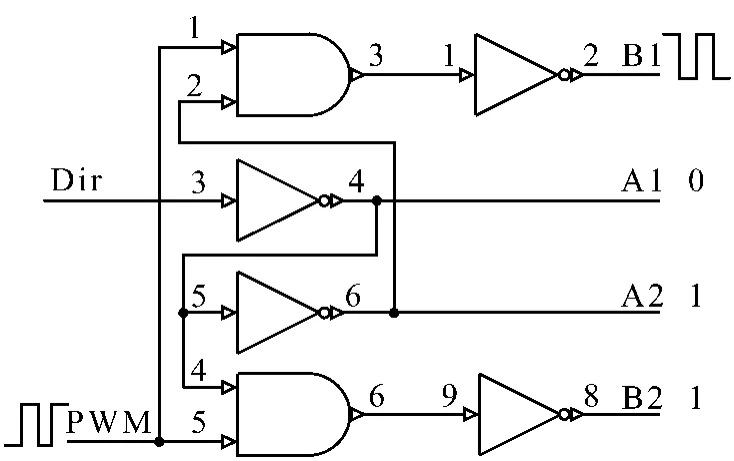
图4 电机驱动逻辑电路图
4.2 光电隔离和驱动放大电路设计
为消除驱动电路对其他电路的干扰,以及对其他电路进行保护,本文将电机驱动电路与其他控制电路进行电气隔离。对光电隔离电路的要求除在电气上进行隔离外,还要求其输出波形的上升沿和下降沿时间短,以通过频率高的PWM信号,使其驱动的场效应管只工作在截止和饱和两种状态。本文的隔离电路采用高速光电隔离器PS9713和普通隔离器TLP521相结合的工作方式,采用该方式可大大提高PWM波形的传送质量。因人所能听到的音频范围是20 Hz~20 kHz,本文的PWM信号频率设为23.4 kHz,使电机在工作时没有嚣叫声,其波形如图5所示,其占空比为0.5。如前所述,由MCU输出的PWM信号和Dir信号经过逻辑电路后,输出两组信号A1,B1和A2,B2,现以第一组为例阐述光电隔离和驱动放大电路的工作过程,其电路如图6所示。当Dir为1时,A1输出电平为0,它用于控制H桥上桥臂;B1是输入PWM相位相反的信号,当B1为低电平0时,光隔U2饱和导通,而U3截止,使三极管Q2截止,功率场效应管因门极G点为高电平1而导通。这个过程实际就是电源对场效应管门极的充电过程。
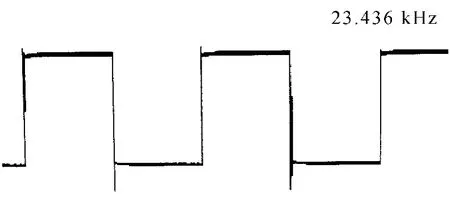
图5 输入的PWM波形图
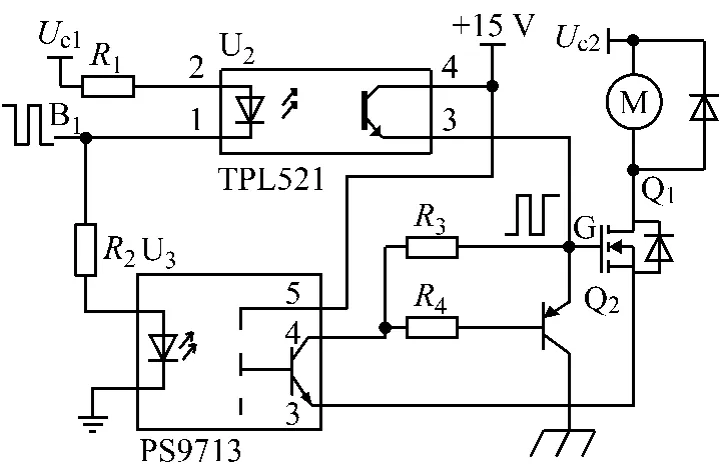
图6 PWM光隔驱动和放大电路图
由图6可见,为了增大Ug1,本文通过稳压管L7815对其提供稳定的15 V电源,PWM的幅值达15 V;同时由电路可见Rg即为U2的集电极发射极间的电阻Rce,因U2饱和导通,所以Rce非常小。通过上述两个改进,隔离放大电路输出的PWM 波形很理想,其上升沿时间约 1.5 μs,如图7所示。当B1为高电平1时,U2截止U3导通,U3驱动三极管Q2,Q2饱和导通,门极G点的电位变为0,场效应管截止。由图7可见,此时电阻Rg为Q2的集电极发射极间的电阻Rce,因Q2为饱和导通,Rce阻值非常小,所以τ小,因此功率场效应管截止时间短。由图7可见,PWM的下降沿时间小于0.5 μs,比较图5和图7可知,PWM输出很理想,波形失真很小。
4.3 H桥功率驱动电路分析

图7 输出的PWM波形图
本文设计的H桥由4个功率型场效应管构成,如图8所示,上桥臂Q1、Q3为2个P型沟道场效应管,下桥臂Q2、Q4为2个N型沟道场效应管。经过光电隔离和放大后的PWM波形幅值达15 V,可以驱动功率场效应管至饱和状态。设MCU输出电机转速控制信号PWM和Dir=1的转向控制信号,经过逻辑电路后,输出两组信号:A1、B1和 A2、B2,其中 A1 为 0,B1 与输入 PWM信号的频率相等而相位相反;A2和B2的电位为1。逻辑电路输出的信号驱动光电隔离电路和H功率驱动电路,现分析其工作过程。因A1的电位是0,则光隔器U1截止,这时通过R2和R3的分压作用使Q1饱和导通;而A2电位为1,它驱动U4饱和导通,Q3门极电压等于Uc2,使Q3处于截止状态。B1是PWM方波信号,由前面分析可知U2和U3工作在推挽方式,使得G2点得到与输入PWM频率相等而幅值为15 V的方波,这样场效应管Q2工作在开关状态;因B2的电位是1,使U5截止而U6导通,这样G4的电位为0,使得场效应管Q4处于截止状态。这时H桥的4个场效应管:Q3和 Q4为截止状态;Q1饱和导通,Q2在PWM作用下工作在开关状态,电机通过Q1和Q2供电,此时电机处于正转,其转速由PWM的占空比决定。同理分析可知,当Dir=0时,Q1和Q2截止,Q3饱和导通,Q4处于开关状态,这时电机反转,转速由PWM的占空比决定。由于该电路没有采用电荷泵电路,其PWM占空比可在0~1任意调节,具有起停时对直流系统冲击小、抗干扰能力强、性能稳定等特点。

图8 光电隔离和H桥驱动电路
5 结语
本文设计的大功率直流电机驱动电路是以场效应管为核心,基于H桥的PWM控制驱动电路,对直流电机的正反转控制及速度调节具有良好性能;同时,通过光电隔离电路的巧妙设计,既实现了电气隔离又能传输23.4 kHz的PWM方波,提高了电路的稳定性。通过试验测试表明:该直流电机驱动电路性能稳定,驱动功率大(驱动电流达30 A);电机速度调节响应快,调速范围宽(PWM占空比调节可在0~1之间任意调节);PWM频率高,消除了电磁嚣叫声;采用了光电隔离电路,消除了驱动电路对其他电路的干扰,对逻辑电路和MCU等电路具有保护功能,能满足实际工程应用的要求。
[1]谭建成.电机控制专用集成电路[M].北京:机械工业出版社,1997.
[2]林渭勋.现代电力电子电路[M].杭州:浙江大学出版社,2002.
