直线开关磁阻电机发电控制系统设计
2011-06-02周宣
周 宣
(中国矿业大学信电学院,江苏徐州 221008)
0 引言
在全球能源日益短缺、人类呼唤“绿色”浪潮日趋高涨的今天,世界能源专家们为了探寻人类未来的理想新能源,将研究的触角伸向广阔的海洋。充分利用海洋潮汐发电,已成为人类理想的新能源之一。
直线开关磁阻电机(Linear Switched Reluctance Motor,LSRM)是由传统的旋转开关磁阻电机(Switched Reluctance Motor,SRM)演变而来的一种新型直线电机[1-4]。由于其结构简单、坚固,具有成本低、工作可靠、控制灵活、运行效率高、容错能力强等特性,在某些特殊领域有一定的应用优越性。SRM是一种典型的机电一体化电机,其控制非常灵活,很容易实现四象限运行。LSRM应用于海洋潮汐发电,与旋转电机相比省去了旋转直线运动的装置,从而提高了整个系统的效率,有着很好的应用前景。本文结合已有的三相6/4结构LSRM,设计了LSRM发电控制系统,用以模拟LSRM在海洋潮汐发电的应用研究。
Intel 196单片机[5]作为电机数字控制芯片,其高速输入、输出口在位置信号捕获和控制各相绕组的开通关断上有其独特的优点,本文选用了Intel 80C196KB单片机作为主控芯片,捕获位置信号和控制各相通断,选用STC12C5A60S2作为辅助芯片输出脉宽调制(Pulse Width Modulation,PWM),并控制液晶显示和键盘,两者通过串口通信协同工作。在此基础上设计了一种新型的直接位置检测器进行位置判断,设计了旋转直线运动的装置,用直流电机作为原动机通过转换装置拖动LSRM作直线往复运动,并进行了试验研究,分析了系统的发电运行特性。
1 LSRM结构及工作原理简介
从结构上看,LSRM与SRM相比,它相当于沿SRM圆周方向,将旋转的定、转子展开,通电的部分为LSRM初级,不通电的部分为LSRM次级。根据应用场合不同,可以选择动初级或动次级结构。由于制造工艺方面的限制,LSRM初级、次级之间的气隙一般远比SRM定、转子间的气隙大。为降低系统成本,简化电动机结构,LSRM一般把相绕组固定在初级上,初级有一个电动机单元,次级有数个单元,其中初级齿距小于次级齿距。
LSRM的运行原理[6-10]跟旋转SRM相似,遵循“磁阻最小原理”,即磁力线具有力图缩短磁通路径以减少磁阻增大磁导的本性,从而使电动机初、次级之间产生一种使磁通路径最短的电磁力,拖着初级到达该磁通对应的磁阻最小的位置。随着各相的顺序导通,直线电机将作连续运动。
LSRM是实现直线运动的机械能和电能之间直接转换的装置,无需任何中间转换或传动机构。其兼有直线电机和SRM的优点。LSRM的结构简单坚固,系统造价低,性能优越,具有较大加速度,匀速运行稳定性高。此外,通过对LSRM各相绕组的交替通电组合控制,可以产生反应驱动力和反应制动力;改变这种交-直-交供电系统的整流电压,可以调节电机运行的速度和驱动力。因此LSRM具有较强的竞争优势,有着较好的发展前景。该系统选用的电机是三相6/4结构,如图1所示。其中每相有两个线圈(两线圈反向串联),次级为整块式铁心导轨,其长度大于初级铁心长度。该电机是短初级长次级、定初级动次级结构,次级沿导轨滑动。
2 控制系统设计
该系统由LSRM、功率变换器、控制器、检测单元和原动机四部分组成,系统结构如图2所示。
2.1 功率变换器设计
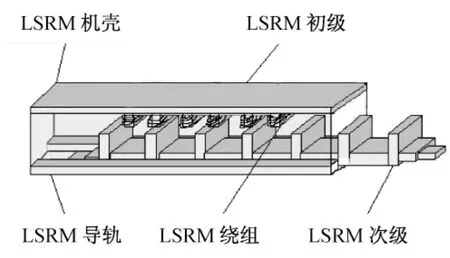
图1 LSRM结构示意图
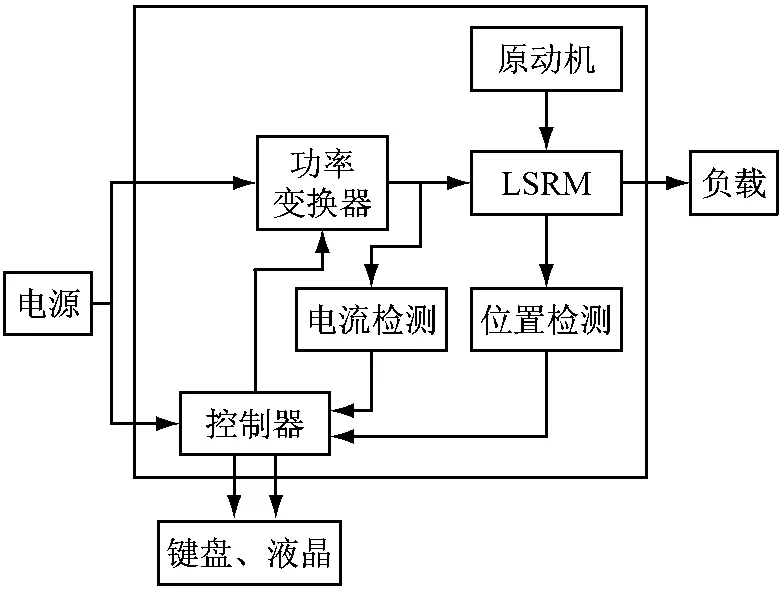
图2 LSRD系统构成框图
功率变换器主电路[11]为三相不对称半桥型,电路如图3所示。其中S1~S6为主开关管,采用IGBT管;VD1~VD6为续流二级管,采用快速恢复大功率二级管。以A相为例,当励磁时,主开关管S1、S2闭合,电池提供能量,励磁电流Is从电池正级出发,经过主开关管S1,流经相绕组,再经过主开关管S2,回到电池负极;当电流建立以后,主开关管S1、S2断开,进入发电状态,绕组中电流IL经过续流二极管VD1、VD2流向负载,为负载提供电能。
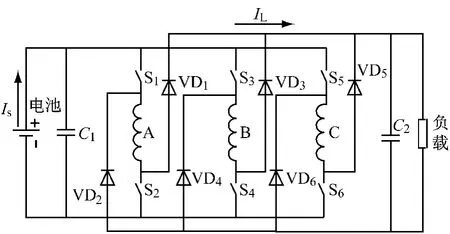
图3 三相不对称半桥型功率变换器主电路
2.2 新型位置检测器设计
传统的直线电机位置检测器,是在旋转电机的光电式转子位置传感器基础上进行结构性改变,即将旋转电机安装于转子的圆形齿盘沿圆周展开,成为直线形齿条,并将其放置于电机次级边,同时将光电传感器固定在初级上,通过它们间的遮光与透光实现检测初级位置的目的。但是,传统的光电传感器容易发生物理损坏,而且附加在次级上的齿条随次级长度的增加会使系统复杂性增加。
由图1可看出,LSRM具有双凸极的特殊结构,该结构决定了其各相电感值随初级与次级间相对位置的变化而变化。当初级齿与次级槽相对时,电感值最小;当初级齿与次级齿正对齐时,电感值最大;在两个位置间电感值连续变化。因此,若在LSRM初级边安装检测器,检测次级边齿、槽的位置,得到与各相电感上升、下降的对应关系,并结合在电感上升区给该相绕组通电,产生正向电动牵引力,在电感下降区通电则产生制动牵引力的原则,可决定当前导通相和换相位置,从而控制电机的运行。因此,这种基于凸极结构的换相位置检测方法只需在初级边安装位置检测器,而在次级边则无需安装任何物理器件。
该试验系统中的位置检测器采用立方体型电感式金属直流三线式NPN型接近开关,型号为TL-Q5MC1,电感式接近开关是一种晶体管无触点行程开关,由振荡器、开关电路及放大输出电路组成。振荡器产生一个交变磁场,当金属目标接近这一磁场,并达到感应距离时,在金属目标内产生涡流,从而导致振荡衰减,以致停振。振荡器振荡及停止的变化被后级放大电路处理并转换成开关信号,准确反映出运动机构的位置和行程,从而达到非接触式检测目的。
该试验样机采用的是定初级、动次级的运行模式,将位置传感器安装在初级侧,使其端部检测面与次级凸极平面的距离保持在检测器可行的检测范围内,如图4所示。次级的凸极与检测器相对时,检测器输出低电平,将信号“0”传递给控制器;反之,将输出高电平,将信号“1”传递给控制器。根据在电感上升区通电产生电动力,下降区通电产生制动力的原则,将检测器输出的高低电平采用一定的算法,变换为相应的换相位置参考信号来控制电机运行。
根据样机的实际情况,将3个位置传感器装在初级侧,如图4所示,K1,K2,K3分别对应于A,B,C三相,电机运动时,位置检测单元获得3路方波信号,通过电平转换,输入单片机的3个高速输入口及3个I/O口。三路信号组合成6种不同的状态(100,101,001,011,010,110),分别代表电机三相绕组的不同参考位置。
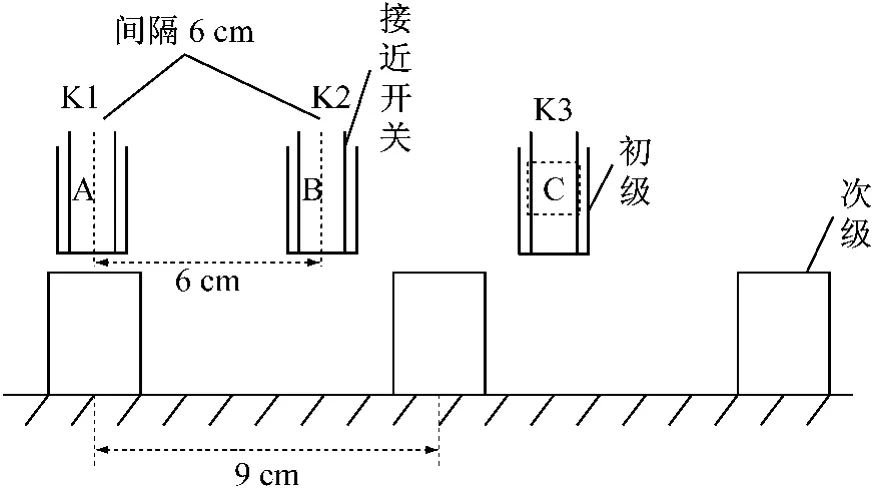
图4 位置传感器安装示意图
位置检测器接口电路将传感器输出信号经过两级CD40106施密特触发器整形后,再经过高速隔离光耦6N137进行隔离和电平转换后连接到信号处理电路,以提高系统的抗干扰性。信号处理电路对信号的处理分两路:一路送单片机的I/O口判断导通逻辑,同时另一路送单片机的高速输入口 HIS.0,HIS.1,HIS.2,用于计算电机速度并作为计算位置的参考。
2.3 控制器设计
该系统控制器选用了Intel 80C196KB和STC12C5A60S2单片机相互配合作为控制核心,前者主要利用其高速输入、输出口作为电机位置信号的捕获和开关信号输出,后者主要用来产生PWM,以及实现一些控制算法、控制液晶显示和键盘等。系统控制器硬件结构示意图如图5所示。
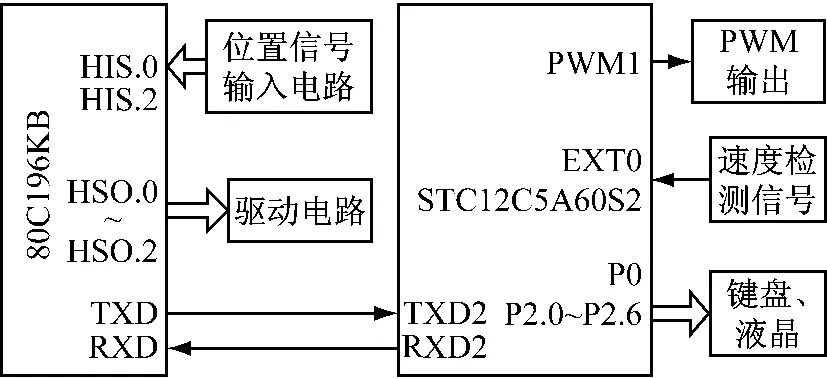
图5 系统控制器硬件结构示意图
2.4 发电装置设计
为了模拟海洋波浪或潮汐发电,设计了旋转直流电机拖动LSRM发电机组。
旋转直流电机通过减速箱减速后通过连杆装置拖动LSRM次级作直线往复运动,从而模拟海洋潮汐发电。
3 软件设计
LSRM数字控制系统软件以系统硬件为基础,通过对电动机位置信息的检测、判断,根据系统工况要求控制功率变换器主开关的开通和关断,实现各种控制策略,使电动机达到要求的运行状态。主程序主要完成以下功能:80C196KB和STC12C5A60S2单片机及外围接口芯片初始化,设置控制参数的初始值、查询运行状态、信息显示、等待外部中断等。
4 试验结果
试验采用电压PWM斩波控制方式控制电机的运行,本文旨在验证系统的可行性,因此固定占空比,匀速运行拖动LSRM发电。图6给出了电机发电时的实测波形,其中图6(a)为A相电流Ia、输出电压Uo和输出电流Io波形,输出电压未经电容滤波,负载为阻性。图6(b)为电机发电时的A相电流Ia'、输出电压Uo'和输出电流Io'波形,输出电压经电容滤波,负载为阻性。
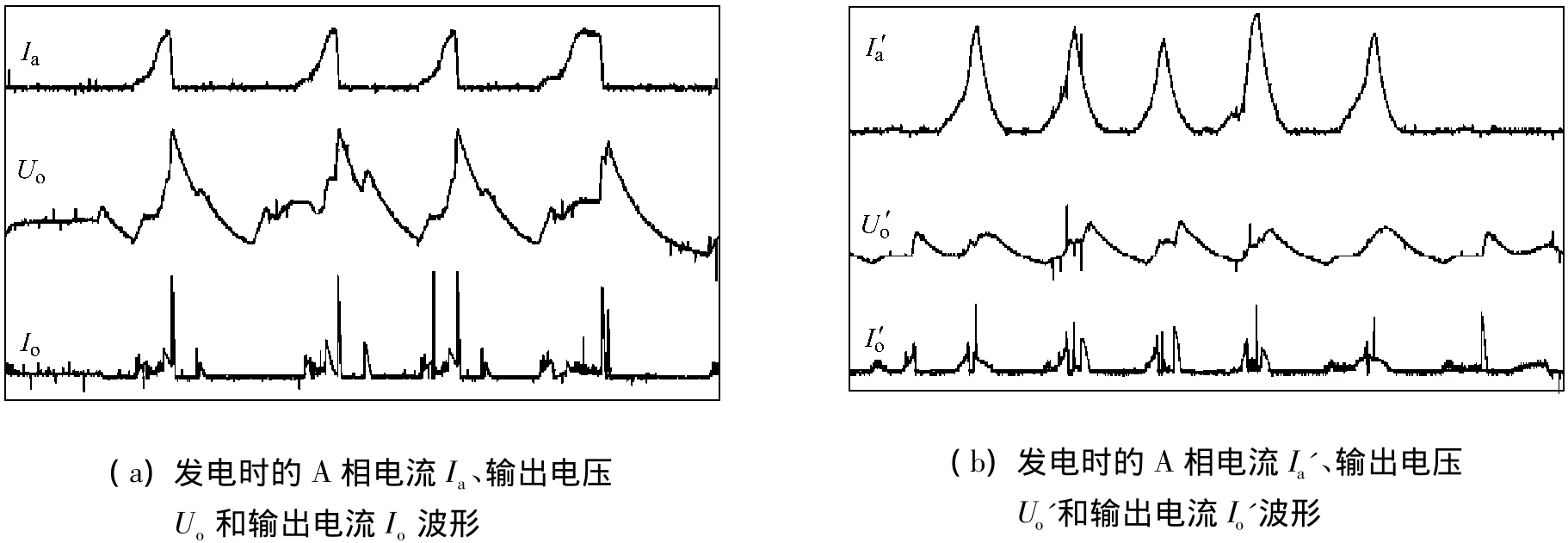
图6 发电实测波形
由图6的发电波形可以看出,在所设计的控制系统和位置检测基础上可以方便地实现电机的发电运行,图6(b)和6(a)相比,输出电压经电容滤波后脉动明显减小。
试验结果验证了本文所介绍的LSRM控制系统和所采用的新型位置传感器的有效性和可行性,方便地实现了电机的发电运行。
5 结语
论文通过分析LSRM的结构和运行原理,针对传统的光电传感器所存在的问题,提出了一种新型的位置检测技术,提高了检测单元的可靠性。发电机组采用旋转直流电机作为原动机通过连杆装置拖动LSRM次级作直线往复运动。设计了基于单片机的LSRM控制系统,充分利用96单片机和STC单片机的优点,两者协同工作,提高了系统的控制性能。试验结果表明,所设计的发电机组和控制系统能够实现LSRM的发电运行控制,通过调节旋转电机的转速可以方便地模拟海洋潮汐发电。
[1]叶云岳.直线电机原理与应用[M].北京:机械工业出版社,2000.
[2]王宏华.开关磁阻电动机调速控制技术[M].北京:机械工业出版社,1999.
[3]陈昊.开关磁阻调速电动机的原理设计应用[M].徐州:中国矿业大学出版社,2000.
[4]谢维达.基于电感式传感器的非接触测速定位方法研究[J].计算机测量与控制,2004(1):38-40.
[5]刘复华.8XC196KX单片机及其应用系统设计[M].北京:清华大学出版社,2002.
[6]郭秀欣.直线电机及其应用简介[J].机械工程师,2003(9):23-26.
[7]Chen Hao,Jin Xin.Switched reluctance linear motor drive system[C]∥ Proceedings of the 6thAsia-Pacific conference on control& measurement,2004(8):305-307.
[8]Hao Chen,Xing Wang,Jason J Gu.Silding mode control of switched reluctance linear generator system[C]∥ Proceedings of 2009 IEEE International Conference on Networking,Sensing and Control,2009(3):779-782.
[9]Hao Chen,Xing Wang,Hui Zeng.Electromagnetic design of switched reluctance linear machine[C]∥Proceedings of 6th International Power Electronics and Motion Control Conference,2009(5):836-840.
[10]Hao Chen,X Wang,Jason J Gu,et al.Nonlinear dynamic simulation model of switched reluctance linear machine[J].Procedia Earth and Planetary Science,2009,1(1):1320-1324.
[11]陈昊,谢桂林,张超.开关磁阻电机功率变换器主电路研究[J].电力电子技术,2000(3):22-25.
