不平衡负载条件下三相四桥臂逆变器的控制
2011-05-11费兰玲蔡院玲
费兰玲,张 凯,蔡院玲
(华中科技大学电气与电子工程学院,湖北武汉430074)
1 概述
基于三相四线制逆变器拓扑结构,提出的三相四桥臂逆变器(four-leg inverter,FLI)广泛应用于功率变换和UPS等场合。它具有直流母线电压低,开关损耗小,可以接非线性及不平衡负载等优点。较之于传统的三相三桥臂逆变器,三相四桥臂逆变器通过添加第四条桥臂为非线性及不平衡负载零序电流提供通路,保证逆变器在各种恶劣负载条件下,仍能给负载端提供三相平衡的正弦电压。其主电路图如图1所示。
在原有三相三桥臂逆变器拓扑结构上发展而来的三相四桥臂逆变器,增加了两个开关管(即:两个开关状态),开关状态由原来的2^3增加为2^4。与传统逆变器相比较,控制方法更加复杂,这在一定程度上局限了三相四桥臂逆变器的应用。新增加的第四桥臂与其它三相共用,形成三相电流回路,因此对其它三相桥臂开关的触发和输出电流的激励产生牵制作用。解除牵制的方法有两个:一是把中性点桥臂与其它三相桥臂分开,单独采用中性点电流进行控制,其余三相桥臂仍可以采用成熟的三桥臂控制方式,如文献[1,2]中采用的调制方式;另一种是把中性桥臂与其余桥臂一起进行协调控制,常见的控制策略如:谐波注入式PWM脉宽调制,3D -SVPWM 脉宽调制技术[3,4]。由于典型的SVPWM调制实质上是一种注入零序分量的三相PWM调制方式[5],在线性调制范围内,零序分量注入的PWM调制方式最大调制比m≤2/,直流母线电压利用率提高15%。本文中关于不平衡负载条件下的三相四桥臂逆变器控制,即是基于零序分量注入的PWM调制方式。三相四桥臂逆变器具有外接不平衡负载能力。然而在实际应用中,由于系统各相硬件环境及控制策略等因素的影响,在不平衡负载条件下逆变器系统输出三相电压仍会有一定程度的不平衡。为进一步改善逆变器系统在严重不平衡负载情况下输出电压的对称性,减小输出电压不平衡度,本文提出一种新颖的控制策略——旋转坐标系下的PIR-P双环控制,并详细介绍了系统模型、控制思想、控制器设计、对比仿真等内容。

图1 三相四桥臂逆变器主电路图
2 三相四桥臂逆变器系统建模
图1中,中性电感Ln主要用于滤除中性电流的开关纹波。此电路采用平均周期法建立静止坐标系下数学模型,负载电流作为外部扰动,输入电源为理想的三相对称正弦信号,以空载情况为例建立数学模型。假定开关管为理想器件,忽略死区效应。上管导通时开关函数为 1,下管导通时开关函数为 0。ila、ilb、ilc、iln分别为A、B、C相及第四桥臂上流进滤波电感的相电流,Udc表示直流母线电压,Lf,Cf为逆变输出的滤波电感和滤波电容,R为滤波电感及死区效应等效电阻,Ln为中性电感(且 Ln=Lf),Uan、Ubn、Ucn为三相对称输出逆变电压。Si(i=a,b,c,n)均表示各个桥臂上开关管状态表示的开关函数。

假设式(1)中忽略开关频率谐波分量的影响,根据开关周期平均的运算方法,即可得到三相桥臂相对第四桥臂的占空比daf、dbf、dcf。对电流回路进行分析得到:

综合上式,用矩阵方程表示为:

以空载情况下建立数学模型,可得到:

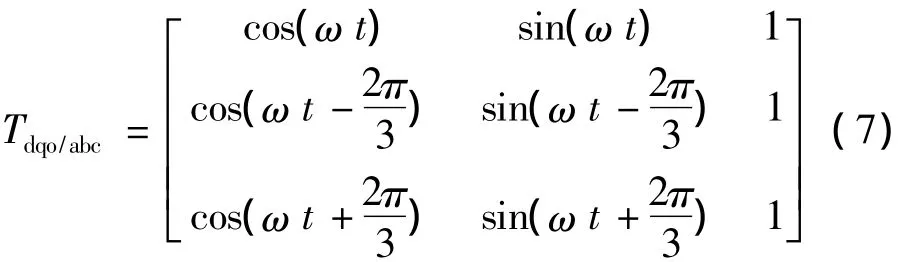
从上述三相四桥臂逆变器在静止坐标系下的数学模型不难发现,当第四桥臂上的中性电感及等效电阻不可忽略时,三相静止坐标系下的三相四桥臂逆变器是一个强耦合系统。A、B、C三相桥臂共用第四桥臂为不平衡负载条件下的零序电流提供通路,三相四桥臂逆变器不能简单等效为三个相互独立的单相全桥逆变器系统。且控制量均为时变的交流量,不利于控制器设计。在此基础上,可将三相静止坐标系下得到的系统数学模型,通过坐标变换,转换到以逆变电源基波频率同步旋转的旋转坐标系下。经坐标变换后,静止坐标系下的基波正弦量变换为直流量,利于控制器设计。由静止坐标系转换到旋转坐标系下的变换矩阵为:

其变换逆矩阵为:
在等式(4),(5)两边同时乘以变换矩阵Tabc/dqo,综合后得到:

式中,Ud、Uq、Uo;id、iq、io;dd、dq、do分别为逆变输出三相电压,三相电感电流,及三相调制占空比在旋转坐标系下 d、q、o轴上的分量。
根据式(8)、(9),不难得到旋转坐标系下三相四桥臂逆变器解耦后系统动态补偿框图,如图2所示。
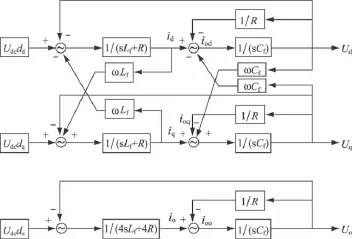
图2 旋转坐标系下系统动态补偿框图
解耦完成后,三相四桥臂逆变器可以转化为三个单相逆变器进行独立控制。采用传统的电流内环电压外环的双环控制策略,即可获得良好的控制效果。调节器的设计可以根据各自独立的数学模型进行设计。需要指出的是,解耦后o轴的数学模型参数不同于d、q轴,设计时需引起注意。
当三相四桥臂逆变器接不平衡负载时,三相负载不平衡电流转换到d、q轴上不仅含有直流分量,还含有由正序和负序分量转换而来的二次基波频率正弦量,且零序分量全部转换为o轴上的基波频率的正弦量。此时采用PI-P双环控制,不能发挥旋转坐标系下控制的优势,系统仍有稳态误差。可考虑电压外环采用PIR控制器,在抑制基波频率及其基波倍频分量影响的同时,可有效改善系统的稳态误差,实现无静差控制。其三相四桥臂逆变器的综合控制框图如图3所示。

图3 三相四桥臂逆变器系统控制框图
3 PIR+P双闭环控制策略
基于内模原理的谐振控制器,将系统信号的动态模型包含在控制系统中,相当于一个信号发生器,它在固定频率点实现无限大增益,对很小的误差信号进行实时控制,可实现对参考信号的完美跟踪。基于此原理的重复控制器,将基波参考信号内模和谐波次频率包含在系统中,与其他控制策略组合而成的复合控制器,已广泛应用于逆变器的非线性负载控制,可获得良好的动态和稳态性能。针对谐振控制器在固定频率点增益无限大的特点,将其与传统的PI-P双环控制器配合使用,P环节用于提高系统动态性能,I环节可以增加系统阻尼,提高系统稳态精度,R谐振环节用于对特定频率点mωe进行控制,以实现对角频率mωe的交流信号的无静差跟踪。因而,PI部分用以保证整个系统的动态性能和稳定裕度,谐振环节R的零点可提供一定的超前相角用以保证系统的相位裕度和稳态性能。其基本的控制器结构形式为:

三相四桥臂逆变器外接不平衡负载时,不平衡负载电流在d、q、o轴上的分量除直流分量外,还分别包括两次基波频率分量和基波频率分量的正弦量,PI控制器不能实现稳态无静差控制。当电压外环采用PIR控制器时,d、q、o轴电压控制器在原有PI控制器基础上,分别添加含有2次、2次、1次基波频率交流信号内模的谐振控制器。利用谐振控制器在这些频率点增益较大的优点,对负序和零序分量产生的交流控制信号进行调节。可有效改善系统的稳态精度,实现理想情况下的无静差跟踪。以d轴控制器为例进行分析,解耦后其d轴控制结构框图见图4。
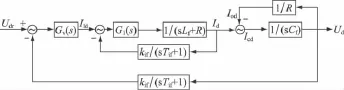
图4 d轴控制器原理框图
3.1 电流内环控制器设计
对电流控制器的设计考虑到变换器的延时和PWM调节的小惯性环节,其电流内环控制框图见图5。

图5 电流内环控制器原理框图
图5中,kR=1/R;TL=L/R;kip表示电流内环比例控制器参数;Kpwm、Ts表示变换器放大系数和时间滤波常数,Ts通常取开关频率的一半;kif、Tif分别表示电流反馈通道比例放大系数和时间滤波常数。则电流内环的开环传递函数为:

依据自动控制系统的工程化设计方法,Ts、Tif均为小时间常数,可以一个一阶环节替代这两个惯性环节,假设用于替代的一阶环节时间常数为Tsf=Ts+Tif。当TL≥Tsf时,可将大惯性环节近似处理为积分环节。进而得到简化后的电流内环的控制器为一典型的Ⅰ型系统,具有快速的跟踪性能:

其电流内环闭环传递函数为:
3.2 电压外环控制器设计


图6 电压外环控制器原理框图
图6 中,kvp、kvi表示电压外环 PI控制器参数,kuf、Tuf分别表示电压反馈通道比例放大系数和时间滤波常数。当忽略负载电流的外在扰动时,系统的开关传递函数为:

可见,电压外环采用PI控制器后为一典型的Ⅱ型系统,其波特图如图7所示,可以依照工程常用的典型的Ⅱ型系统设计准则。工程中常用的设计准则有:

图7 典型Ⅱ型系统波特图
(1)Mr=Mmin准则:使得系统闭环幅频特性的谐振峰值Mr为最小的准则。即Mr最小,使得超调量和调整时间最小。
(2)γ=γmax准则:使得系统开环频率特性中的相位裕量γ为最大的准则。即相位裕量最大,使得超调量最小。
根据上式可先求得闭环系统的相位裕度:



工程设计的关键就是确定中频带宽h。工程应用中,h的取值范围通常为3~10之间。h取值越大,系统的超调量越大,系统调节时间越长,相角裕度越大,反之亦然。通常情况下,折衷选择h为4,5时,系统调节时间较短,可获得较好的控制性能。
3.3 谐振控制器设计
电压外环的谐振控制器独立于PI控制器进行设计,它只对某些特定的频率点mωe进行控制。实际应用中的谐振控制器还需要提供一定的超前相位角φm,用以对采样、计算以及PWM调制等过程中的延迟相位角进行补偿。由于上述谐振控制器在谐振频率点是零阻尼的,实际过程中的噪声极易引起系统的不稳定。因而,在谐振控制器中引入阻尼系数ξm,提供足够宽的频率调节范围,在增加系统阻尼的同时,使其增益下降,保证系统的稳定性。改进后的谐振控制器其数学描述形式为:

式中,m表示需控制的谐波次数;ωe表示基波频率;Kim表示m次谐振控制器的增益。需提供的相位超前角φm计算可依据公式(18)

式中,τT表示采样、计算以及PWM调制等过程中总的时间延迟(一般取2个采样周期)。不难发现,随着谐波次数增大,需要的系统延时相位角也随之增大,这与实际情况是相吻合的。谐振控制器阻尼系数ξm的设计可依据公式(19)。?

式中,△ω表示在特定频率点mωe的控制带宽。为保证控制器在特定频率点有足够的控制带宽和合适的增益,△ω需要随着谐波次数的m增大也适当增大[6]。
应用谐振控制器可以获得良好的稳态性能,但其动态性能较差。当电压外环采用PI+R复合控制器,利用PI控制器获得良好的动态性能,谐振控制器保证其稳态精度。以上内容以d轴控制器为例,基于自动控制系统工程化设计方法理论,详细介绍了电流内环,电压外环,及谐振控制器的参数设计方法。q、o轴控制器的设计方法与之类似,这里不再详细论述,值得注意的是,o轴等效系统的电感参数不同于d、q轴;d、q轴电压外环控制器在原有PI控制器基础上,叠加2倍基波频率的谐振控制器;o轴电压外环控制器在原有PI控制器基础上,叠加基波频率的谐振控制器。
4 仿真结果
为验证所述控制方案的正确性,采用Matlab/Simulink对整个三相四桥臂逆变器进行系统仿真,逆变器输出电压频率为50 Hz,输出相电压峰值为311 V,开关频率为16 kHz,每相滤波电感为1 mH,滤波电容为150 μF。不平衡负载情况为:A相负载电阻10 Ω(100%满载),B、C相空载的严重不平衡情况。各d、q、o轴控制器参数设计如表1所示。
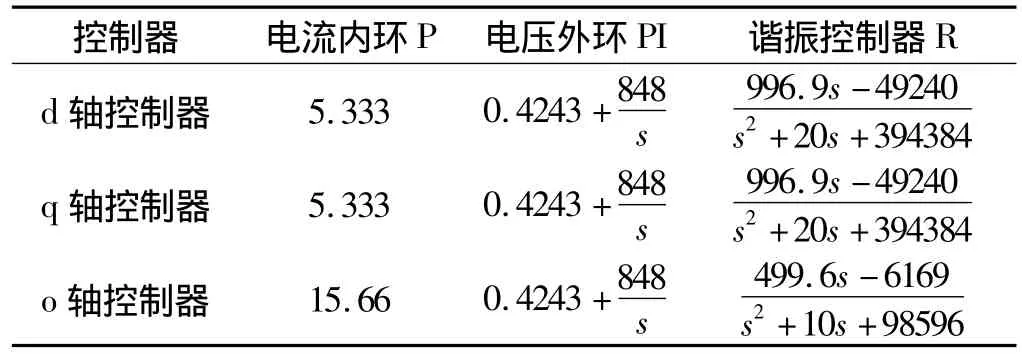
表1 d、q、o轴控制器参数
三相四桥臂逆变器采用PI-P双闭环控制器空载正常运行,0.075 s时刻突加三相不平衡负载(A相阻性满载,B,C相空载),持续运行5个基本周期后,在0.175 s时刻突卸不平衡负载,系统输出三相电压波形如图8所示。可见空载情况下,电压外环采用PI控制器即可获得良好的稳态性能。突加和突卸三相不平衡负载后,三相输出电压经一个基波周期后即可完全恢复,系统动态性能良好。三相输出电压经变换到d、q、o轴后,d、q轴包含正序电压分量经坐标变换后得到的直流分量,以及负序电压分量经坐标变换后得到的二次基波频率交流量,o轴包含由零序分量经坐标变换后得到基波频率交流量。其中d轴直流电压分量即为三相输出电压正序分量峰值,二次基波频率交流量峰值为三相电压负序分量峰值,o轴基波频率交流分量峰值即为三相电压零序分量峰值。其d、q、o轴电压分量仿真波形如图9所示,三相外接不平衡负载时,三相不平衡电压负序分量为7.5 V,零序分量为7 V。三相输出电压负序不平衡度为2.41%,零序不平衡度为2.25%。
当电压外环在原有PI控制器基础上添加谐振控制器后,系统采用PIR-P双闭环控制器空载正常运行,在0.075 s突加三相不平衡负载,持续运行5个基本周期后,在0.175 s时刻突卸不平衡负载,其三相输出电压波形如图10所示,其d、q、o轴的电压分量波形如图11所示。

图8 PI-P双闭环控制器下三相输出电压仿真波形

图9 PI-P双闭环控制器下d、q、o轴电压分量仿真波形

图10 PIR-P双闭环控制器下三相输出电压仿真波形

图11 PIR-P双闭环控制器下d,q,o轴电压分量仿真波形
可见,谐振控制器对d、q、o轴二次和基波次交流分量抑制作用显著。电压外环采用谐振控制器后,三相外接严重不平衡负载时,负序电压分量为0.4 V,零序电压分量为0.1 V。三相输出电压负序不平衡度为0.129%,零序不平衡度为0.032%。三相输出电压不平衡度得到显著减小。
5 结语
本文主要针对三相四桥臂逆变器接不平衡负载情况下,为改善三相输出电压不平衡度,提出一种电压外环PI控制器与谐振控制器联合控制的控制策略。以A相100%阻性满载,B,C相空载这一严重负载不平衡情况为例,分别对电压外环采用PI控制器和PIR控制器两种情况作对比分析,发现谐振控制器的使用显著改善了系统输出电压不平衡度。这种控制策略可应用于对三相输出电压对称性要求较高的场合。
[1]孙 驰,鲁军勇,马伟明,等.一种新的三相四桥臂逆变器控制方法[J].电工技术学报,2007,22(2):58-64.
[2]杨 宏,阮新波,严仰光.采用最大电流误差调节的四桥臂三相逆变器[J].电力电子技术,2003,37(1):32-33.
[3]Zhang R,Boroyevich D.Three-dimensional space vector modulation for four-leg voltage source converters.IEEE Trans on PE,2002,17(3):314-320.
[4]Prats M M,Franquelo L G.Three-dimensional space vector modulation in abc coordinates for four-leg voltage source converters.IEEE Trans on PE Letters,2003,1(4):104-109.
[5]Xiong Jian,Kang Yong,Zhang Kai,et al.Comparison study of voltage space vector PWM and conventional SPWM[J].Power Electronics,1999(1):25-28.
[6]Eyyup Demirkutlu,Ahmet M.Hava,et al.Output Voltage Control of A Four-Leg Inverter Based Three-Phase UPS by Means of Stationary Frame Resonant Filter Banks[J].IEEE Trans on PE,2001,10(2):124-131.
