竖直方向弹性约束悬臂梁的固有频率分析
2011-05-10王太勇
杨 帅,王太勇
(天津大学机械工程学院,天津 300072)
梁结构是工程应用中最广泛的结构之一,大量应用于机械、建筑、桥梁、航天和汽车等领域.梁结构的动态性能与其约束条件有密不可分的关系,基于线性简化的多种经典约束条件的梁结构的动态性能的研究已经非常成熟[1-3].近年来,众多学者对于柔性悬臂梁结构的模态控制与参数识别都进行了相关的研究[4-6],对于旋转运动、轴向运动对梁结构的动态性能的影响也进行了广泛的研究[7-11].目前,对于可变约束条件的梁结构的相关研究较少,悬臂梁结构在工程应用中,其固定端一般近似为固定约束.但是当出现松动或者支撑条件不能近似为固定约束时,梁的动态特性就有相应的变化.
笔者针对固定端在竖直方向为弹性约束的悬臂梁固有频率进行分析研究,建立并验证约束刚度与梁结构前3阶固有频率的关系,从而可根据约束刚度控制梁结构的固有频率,也可根据固有频率识别约束其刚度.
1 弹性约束悬臂梁低阶模态分析
图1所示为固定端竖直方向为弹性约束的悬臂梁模型,在固定端y方向上为弹性约束,刚度为k,旋转方向为固定约束.

图1 弹性约束悬臂梁系统Fig.1 Elastic support beam system
应用欧拉-伯努利梁[3]模型,得到梁的横向自由振动运动微分方程为

其通解为

式中:E为梁的弹性模量;J为抗弯截面系数;ρ为梁的材料密度;A为梁截面面积;y(x,t)为梁结构的主振型函数;β为与振型有关的特征参数.
该模型弹性支撑部分是微小振动,不属于大范围运动.采用分离变量法求解,取弹性约束端为边界条件,即

再将式(5)代入式(6),得

由式(7)可得到非零解,则系数 C1、 C2不全为零,必有对应行列式为0,得到

式中:η为约束刚度与梁弯曲刚度之比再乘以梁长度的三次方;λ=βl.λ2与固有频率ω呈正比,即

较低阶固有频率在设计与响应分析方面有重要的意义,下文讨论前 3阶模态与支承刚度的关系.首先分析k的两种极限条件情况,确定在k的影响下前3阶λ的变化范围和振型.
极限条件10,k→ 式(8)则等效于方程

即为固定端只有转动约束的梁方程,数值解得λ10=0,λ02= 2 .365,λ03= 5 .497.
极限条件2k→+∞,式(8)则等效于方程

即为理想悬臂梁方程,数值解得=1.875,=4.694,= 7 .855.
图2为在两种极限条件下,前3阶固有频率对应的振型.随着刚度k值的变化,固有频率及对应振型应在两种极限条件之间转变.
下文分析 k在极限条件区间内部变化时,对应前3阶λ的变化曲线.式(8)为超越方程,得不到λ关于k的解析解,因此,取若干不同 k值,对式(8)应用数值方法进行求解,可得到3条lgη-λ曲线.随着参数η的变化,各阶模态的固有频率值都会有相应的变化,图3为前3阶模态的lgη-λ曲线.k增大,η也相应增大,对应的λ值从极限条件2向极限条件1转变.

图2 两种极限条件下的前3阶固有振型曲线Fig.2 First three vibration mode curves under two extreme conditions
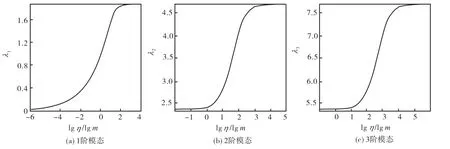
图3 前3阶模态的lg-η λ曲线Fig.3 lg -η λcurves for first three modes
从图3中可以看出,λ1、λ2、λ3随lgη值变化,分别在区间(-4,2)、(0.2,3.2)和(1.3,3.8)内变化明显,在区间外可近似地等同于两种极限条件下情况.参数λ与η数量级有明显的变化关系,在变化区间中部可近似为线性关系.
为了得到一般性的刚度k与λ的关系,采用最小二乘法,对前3阶模态的lg-η λ曲线在k的主要变化区间内所有数值解进行5次函数曲线拟合,得到
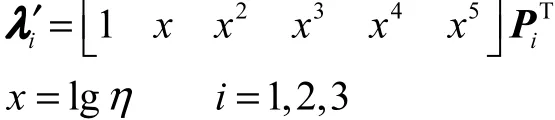

拟合后λ′1、λ′2、λ′3与λ1、λ2、λ3的相对误差曲线如图4所示.

图4 拟合函数的相对误差曲线Fig.4 Relative error curves of fitting functions
由图 4可知,对应函数拟合的结果较为精确,在定义区间误差在接近下边界处较大,随着lgη增大,拟合误差逐渐减小,精度逐渐提高.
由以上推导,可以得出前3阶固有频率随约束刚度变化的关系函数.
2 有限元方法验证
针对上述结果,采用有限元方法对不同尺度的梁结构模型进行对照验证.

表1 有限元方法验证的固有频率结果Tab.1 Nature frequency verification results of FEM
例如:选用悬臂梁模型截面为 20,mm×80,mm,长度 l = 1 000 mm .材料为普通合金钢,弹性模量为2× 1 011N/m2,泊松比为0.28,密度为 7 700 kg/m3,对应不同刚度值,结果对比如表1所示.
由表1可以看出,拟合的含参数k的前3阶固有频率值与有限元计算的结果非常接近,误差基本控制在 2%内.同时,由函数计算出的振型形状与有限元分析的结果也基本一致.
3 基于固有频率识别梁结构端部约束刚度
通过以上拟合的函数,可以确定端部约束刚度与各阶模态频率之间的关系.因此,只要确定各阶模态频率值以及材料常数,就可通过函数的解得到端部的约束刚度值.
由前3阶固有频率值可得到对应的λ1、λ2和λ3,根据拟合函数λ′1、λ′2和λ′3的值域,选取求解方程,得到对应的lgη,从而可根据材料常数得到刚度k.由于取3阶固有频率计算,在反求k时会有3个可解函数.为保证精确性,在求解 x时,选取在对应值域区间中部的λ进行拟合函数求解,使误差最小.
应用第 2节的梁的参数,预设不同的刚度值.通过有限元法求得固有频率,求解拟合函数的结果比较,结果如表2所示.
从以上计算可以看出,运用拟合函数进行端部刚度识别的方法,识别刚度与预设刚度误差小于 6%,对应的 x相对误差小于 2%,说明该方法具有一定的可靠性.

表2 约束刚度识别Tab.2 Restraint stiffness identification
4 结 语
本文研究约束端部平动方向为弹性支撑的悬臂梁结构的固有频率与支撑刚度的关系,分析了前3阶模态受约束刚度影响的变化曲线,发现固有频率与端部刚度的数量级有明显的变化关系,描述并拟合了关系曲线.
基于有限元方法,通过前3阶模态的固有频率对拟合函数的正确性进行验证,误差小于2%.
应用lgη-λ曲线,通过结构前 3阶模态的固有频率进行端部刚度的识别,相对误差在 6%左右,在数量级尺度下误差控制在 2%以内,验证了该识别方法的正确性.
[1]铁摩辛柯 S,杨 D H,小韦 W. 工程中的振动问题[M]. 胡人礼,译. 北京:人民铁道出版社,1977.
Timshenko S,Young D H,Weaver W.Vibration Problems in Engineering[M]. Hu Renli,Trans. Beijing:People Railway Press,1977(in Chinese).
[2]邵忍平. 机械系统动力学[M]. 北京:机械工业出版社,2005.
Shao Renping.Dynamics of Machine System[M]. Beijing:China Machine Press,2005(in Chinese).
[3]师汉民. 机械振动系统的分析·测试·建模·对策[M]. 武汉:华中科技大学出版社,2004.
Shi Hanmin.Vibration System——Analyzing·Testing·Modeling·Controlling[M]. Wuhan:Huazhong University of Science and Technology Press,2004(in Chinese).
[4]Yang Kyung-Jinn,Hong Keum-Shik,Yoo Wan-Suk,et al.Model reference adaptive control of a cantilevered flexible beam[J].JSME International Journal,2003,46(2):640-651.
[5]Megahed S M,Nada A A. Dynamic modeling of a flexible cantilever beam:An experimental technique[C]//Proceedings of the ASME Design Engineering Technical Conference.Chicago,IL,USA,2003,5A:449-455.
[6]王 慧,刘正士,陈恩伟,等. 悬臂梁结构模态参数Hilbert-Huang变换识别方法[J]. 农业机械学报,2008,39(9):187-191.
Wang Hui,Liu Zhengshi,Chen Enwei,et al. Application of HHT for modal parameters identification to cantilever beam structure[J].Transactions of the Chinese Society of Agricultural Machinery,2008,39(9):187-191(in Chinese).
[7]Cai Guoping,Hong Jiazhen,Yang S X. Model study and active control of a rotating flexible cantilever beam[J].International Journal of Mechanical Sciences,2004,46:871-889.
[8]Khulief Y A. Vibration suppression in rotating beams using active modal control[J].Journal of Sound and Vibration,2001,242(4):681-699.
[9]杨 辉,洪嘉振,余征跃. 一类刚-柔耦合系统的模态特性与实验研究[J]. 宇航学报,2002,23(2):67-72.
Yang Hui,Hong Jiazhen,Yu Zhengyue. Vibration analysis and experiment investigation for a typical rigid flexible coupling system[J].Journal of Astronautics,2002,23(2):67-72(in Chinese).
[10]章定国,余纪邦. 作大范围运动的柔性梁的动力学分析[J]. 振动工程学报,2006,19(4):475-480.
Zhang Dingguo,Yu Jibang. Dynamical analysis of a flexible cantilever beam with large overall motions[J].Journal of Vibration Engineering,2006,19(4):475-480(in Chinese).
[11]李山虎,杨靖波,黄清华,等. 轴向运动悬臂梁的独立模态振动控制(I):近似理论分析[J]. 应用力学学报,2002,19(1):35-38.
Li Shanhu,Yang Jingbo,Huang Qinghua,et al. Independent model space vibration control of an axially moving cantilever beam(I):Theoretical analysis of approximation[J].Chinese Journal of Applied Mechanics,2002,19(1):35-38(in Chinese).
