基于Fuzzy自整定PID的主汽温度控制系统设计与仿真
2011-04-21李玉杰
马 阳,李玉杰
(沈阳工程学院,辽宁 沈阳 110136)
主蒸汽温度是锅炉运行质量的重要指标之一,主蒸汽温度过高或过低都会显著地影响电厂的安全性和经济性。过热汽温的上限一般不应超过额定值5℃,过热汽温的下限一般不低于额定值10℃。过热汽温的额定值通常在500℃以上,例如高压锅炉一般为540℃,要使过热汽温保持在540±5℃的范围内。汽温过高会使锅炉受热面及蒸汽管道金属材料的蠕变速度加快,影响使用寿命。汽温降低会使机组循环热效率降低,煤耗增大。此外,汽温过低,汽轮机转子所受的轴向推力增大,对机组安全运行十分不利。
目前,火电机组广泛应用PID串级控制方式控制过热蒸汽温度。由于过热汽温对象的大惯性、大延迟和时变特性,给蒸汽温度调节带来很大困难,当负荷发生变化时,主蒸汽温度的动态特性变化明显,参数和结构变化较大,常规PID调节器难以满足其调节品质的要求。因此,研究和改善现有的控制方式显得尤为重要,并具有实用价值。模糊控制作为一种智能控制方式,在工业控制中逐步得到应用。模糊PID控制器不需要建立被控对象的精确数学模型,能够克服非线性因素的影响。因此,模糊控制技术很适合应用于火电厂主汽温调节系统这样复杂的系统中。
1 主蒸汽温度控制系统
1.1 控制对象特性
汽温控制的质量直接关系到机组的安全经济运行,而过热汽温的控制又是锅炉各项控制中较为困难的任务之一。
a.造成过热汽温变化的原因很多,例如:负荷、减温水量、烟气侧的过量空气系数及火焰中心的位置、燃料成分等都会影响汽温的变化。
b.在各种扰动作用下汽温对象具有非线性、时变等特性,使控制难度加大。
c.汽温对象具有大迟延、大惯性等特点,尤其随着机组容量和参数的提高,蒸汽过热受热面比例的增大,使其迟延和惯性更大,从而进一步加大了控制的难度。
过热器工作在高温、高压的环境下,出口汽温是全厂工质温度的最高点,也是金属壁温的最高处,工艺上允许的汽温变化范围又很小,加之干扰因素多,对象特性呈现非线性等诸多不利因素,使汽温控制系统复杂化。
1.2 主汽温控制方式
目前,采用最多的是串级汽温控制系统喷水减温控制方案。系统结构如图1所示。系统中有主、副两个调节器,主调节器PI1用于维持主蒸汽温度θ1,使其等于给定值,副调节器PI2接受主调节器的输出信号和减温器出口温度信号,副调节器的输出控制执行机构KZ的位移,从而控制减温水调节阀门的开度。
在主蒸汽温度串级PID控制系统中,有时会将负荷信号、燃料量信号、主蒸汽压力信号、给水流量信号以前馈形式引入到串级系统的副调节器中,以实现“超前”调节。但以调节参数固定不变的PID控制器来控制主蒸汽温度这种时变的复杂对象时,控制效果仍会很不理想。

图1 串级汽温控制系统
2 Fuzzy自整定PID控制器的设计
2.1 Fuzzy自整定PID控制器结构与原理
Fuzzy自整定PID控制器目前有多种结构形式,但其工作原理基本一致。如图2所示,模糊PID控制器以误差e和误差变化ec作为输入,可以满足不同时刻的e和ec对PID参数自整定的要求。利用模糊控制规则在线对PID参数进行修改,便构成了Fuzzy自整定PID控制器。

图2 Fuzzy自整定PID控制器结构图
PID参数的整定必须考虑到在不同时刻3个参数的作用以及相互之间的互联关系。在线实时模糊自整定PID控制器控制方案原理如图2所示。模糊自整定PID是在PID算法的基础上,通过计算当前系统误差e和误差变换率ec,利用模糊规则进行模糊推理,查询模糊矩阵表进行参数调整。模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表。建立好针对kp、ki、kd3个参数分别整定的模糊控制表之后,可以根据如下方法进行kp、ki、kd3个参数自适应自校。将系统误差e和误差变化率ec变化范围定义为模糊集上的论域。其模糊子集为e,ec= {NB,NM,NS,ZO,PS,PM,PB},设e、ec和kp、ki、kd服从正态分布。因此,可得到各模糊子集的隶属度函数,根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理,设计PID参数的模糊矩阵表,查出修正参数带入下式计算:

在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PID参数的在线自校正。
2.2 模糊控制器设计
由图2可知,模糊控制器为2输入3输出结构。两个输入量分别是e(pH误差)、ec(pH误差变化率)。输出分别是kp、ki、kd。根据实际情况,语言变量论域与语言值集合设为
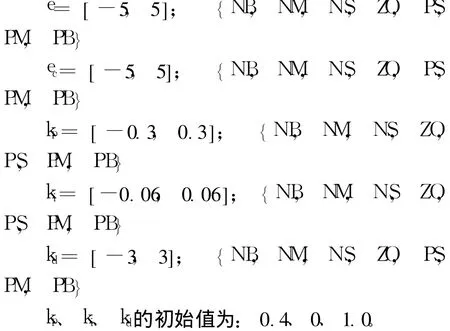
根据汽温对象的特性采用经验归纳法建立kp、ki、kd的模糊控制规则表如表1、表2、表3所示。
模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊控制规则表,因此PID参数的整定必须考虑在不同时刻3个参数的作用以及相互之间的互联关系。根据参数kp、ki和kd对系统输出特性的影响情况,可归纳出在一般情况下,在不同的e和ec时,被控过程对参数kp、ki和kd的自整定要求。

表1 kp的模糊规则表

表2 ki的模糊规则表

表3 kd的模糊规则表
a.当误差较大时,说明误差的绝对值较大,不论误差的变化趋势如何,都应该考虑控制器的kp取较大值,以提高响应的快速性;而为防止误差变化率瞬时过大,ki应该取较小的值;为控制超调,kd也应该取值很小。
b.当误差在中等大小时,为保证系统的响应速度并控制超调,kp、ki、kd值应减小。
c.当误差较小时,为保证系统具有良好的稳态特性,应加大kp、ki的取值,同时为避免产生振荡,kd的取值应该和误差变化率联系起来。
3 系统仿真
本文以某电厂300 MW机组主汽温为被控对象,对象模型为

设计了常规PID控制系统和Fuzzy自整定PID控制系统。为了检验所设计系统的控制品质,运用Matlab对系统在不同工况下进行单位阶跃定值扰动仿真,在200 s控制作用加入阶跃扰动。
图3所示为分别采用模糊PID控制、常规PID控制的系统阶跃响应输出特性曲线。对比2条仿真曲线,通过分析可以得到如下结论。

图3 控制系统输出曲线
a.普通PID控制器响应速度快,但过渡时间较长,由于主汽温对象迟延时间大并伴有较大超调,对干扰抑制能力也较差,而且伴有振荡状态。
b.模糊自适应PID控制超调较小,调节速度较快,尤其在抗干扰方面能力最强。扰动发生后,在较短的时间内在线调整控制器参数,使输出较平稳的恢复到平衡状态。
4 结束语
火电厂主汽温对象较为复杂,存在较大迟延及难以确切描述的非线性,常规控制策略难以取得较好的控制效果。本文提出了基于模糊控制技术的智能控制策略,设计了Fuzzy自整定PID控制器。通过分析现场实际情况及运行人员的操作经验,建立了PID参数的模糊规则表,从系统仿真曲线可看出本文所设计的Fuzzy自整定PID控制器具有一定的容错能力,抗干扰能力强,可以有效地抑制实际系统中非线性的不利影响,具有良好的快速性、稳定性和鲁棒性,是一种较好的控制方案。
[1] 边立秀.热工控制系统[M].北京:中国电力出版社,2002.
[2] 刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003.
[3] 陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2002.
[4] 汤振志.改进型锅炉主汽温控制系统[J].云南电力技术, 2010,38(1):77-78.
[5] 白雄怀,王文兰.新型SMITH预估控制算法在主汽温控制系统中的应用研究[J].工控自动化,2010,36(1):58-60.
[6] 王 斌,李 鹏.Fuzzy自调整PID的Smith预估主汽温控制系统[J].电气技术,2008,(4):45-47.
