基于ANSYS技术的主从控制机械臂支承架模态分析及优化
2011-04-10赵玉良陈凡明
李 健,戚 晖,赵玉良,陈凡明
LI Jian,QI Hui,ZHAO Yu-liang,CHEN Fan-ming
(山东电力研究院,济南 250101)
0 引言
主从控制机械臂具有良好的工业化产品特性,控制实时性较好,操作简便,运行可靠,可替代人工完成作业频率较高的任务[1]。主从控制结构要求主手操控和从手机械臂分开安装在各自的支承底架上,通过操控主手实现从手机械臂的同步动作。因此,支承底架作为机械臂的支承骨架,是安装附件及其他零部件的基础,并保持主从手在工作过程中相对准确的位置。支承底架结构的设计必须保证它有足够的强度和刚度,既不能产生裂纹,也不能出现过大变形。
本文针对主从控制机械臂支承底架的结构特点,利用三维软件建立实体模型,并通过有限元分析软件对其进行模态分析,得出了支承底架在承受工作载荷工况下固有频率和模态振型,通过振型分析找到了支承架振动的薄弱部位,提出了相应的改进方案,进行结构优化设计,减小支承架变形和振动,降低系统噪声,为改善支承强度、改进底架结构设计提供了理论依据。
1 主从控制机械臂支承架有限元模型的建立
1.1 支承架实体模型的建立
实体模型建立合理与否对接下来的网格划分以及最终计算结果的准确性具有重要的影响。支承底架结构较为复杂,分布有各种加强筋、凸台和纵横加强腹板。同时,作为机械臂的主要承力部件,在工作过程中其受力情况也极为不均匀,既要承受自身载荷对支承架作用力,又要承受作业过程中外加载荷施加底架的作用力及力矩。其结构和受力的复杂性决定了它是机械臂的关键部件,直接影响机械臂整机性能和可靠性。
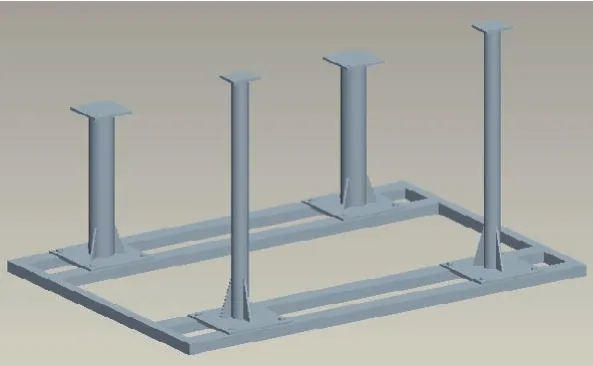
图1 支承底架三维实体建模
在利用三维软件建立其实体模型时不可能每一个细节都一一考虑,综合考虑计算精度的影响及有限元模型的计算规模,根据圣维南原理,对部分局部特征进行了如下简化:1)忽略底架内部工艺孔;2)忽略各加强筋处的过渡圆角;3)忽略除主支承孔以外的小螺栓孔。建成的实体模型如图1所示。
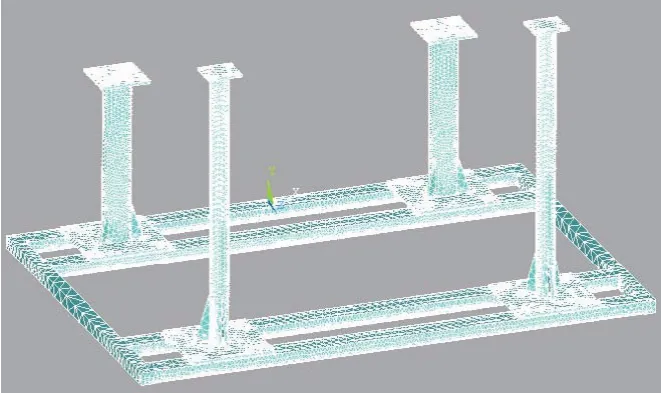
图2 支承底架有限元模型
1.2 支承架有限元模型的建立
实体模型以IGES格式导入有限元软件。进行有限元网格划分时,首先必须确定单元类型[2]。选用十结点四面体单元进行网格划分,该四面体单元通过10个节点来定义,每个节点有3个沿着X,Y,Z方向平移的自由度,它具有二次迭代的特性,对边界拟合的能力强,适用于划分由各种CAD/CAM 导入的不规则网格的模型[3]。主从控制机械臂支承底架材料为HT200,其弹性模量E=1.5×105MPa,泊松比µ=0.28。划分网格时,首先对加载部位进行尺寸控制,然后在网格划分工具对话框中选择6级精度对模型进行自由网格划分,划分后分别得到64194节点和179843个单元,划分结果较理想,网格划分如图2所示。
2 主从控制机械臂支承架有限元模态理论分析
将主从控制机械臂支承架结构近似看为线性系统,则位移和外力都是时间的常数。考虑到阻尼力与速度成正比、惯性力与加速度成正比,根据达朗贝尔原理,该机体动力平衡方程如下:

式中:[M]、[C]、[K]— —总体质量矩阵、阻尼矩阵和刚度矩阵
{F(t)}— —结构的激振力向量
若无外力作用即{F(t)}={0}时则得到系统的自由振动方程。在求解结构自由振动的固有频率和振型即求结构的固有频率和振型时,阻尼对它们影响不大,因此阻尼项可以略去,这时无阻尼自由振动的运动方程为:

设结构作下述简谐运动:

把上式代入式(2),可得齐次方程,如下:

在自由振动时,结构中各结点振幅{φ}不全为零,因此式(4)中括号内矩阵的行列式之值必为零,由此得到结构自振频率方程,即:

结构刚度矩阵[K]和质量刚度矩阵[M]都是n阶方阵,其中n是结点自由度的数目,所以式(5)是关于ω2的n次代数方程,由此可求得n个固有频率ωi(i=1,2,3...,n),对于每个固有频率 ,由式(4)可确定 个结点振幅构成的一个列向量工程上称为振型,其振幅构成固定的形状,绝对值可以任意变化[4]。到此,通过求解式(5)便可求得系统的固有频率及其对应的振型。
3 主从控制机械臂支承架模态分析
3.1 边界条件的施加
主从控制机械臂支承架在实际工作状态下,通过支架底部两纵向杆地脚螺栓固定在水泥地板上。为使计算能够反映支承架的实际情况,对支承架施加以下约束:
1)支承底架位移约束:对该支承底架底部两纵向连接杆施加全约束;
2)支承底架所受载荷:单个从手机械臂自重59kg,单个主手自重12.7kg;机械臂伸展开长度1289mm,机械臂手爪平举位置最大持重45 kg,支承底架承受侧翻力矩568.5 N.M;
将载荷加载完毕,确定条件满足后,运行当前求解命令,进行模态元分析。
3.2 约束模态结果分析
对结构进行ANSYS有限元模态分析,一般不必求出系统的全部固有频率和振型,振动可以表达为各阶固有振型的线性组合,其中低频的固有振型要比高频对结构的振动影响大,因此,低价振型对支承架的动态特性起决定作用,所以进行结构的动态特性分析计算时,只需对其前几阶振型进行分析即可[5]。该分析提取了箱体的前十阶模态,其固有频率值如表1所示,振型如图3-12所示。
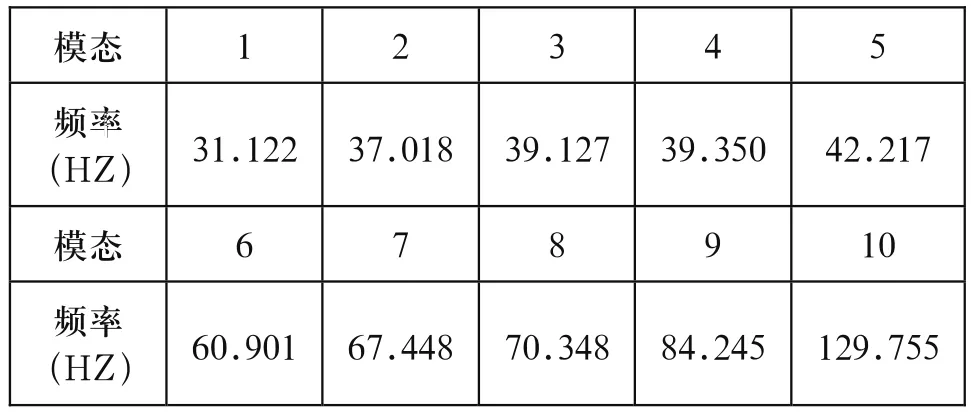
表1 固有频率值
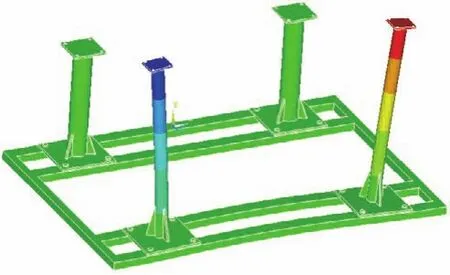
图3 一阶振型图
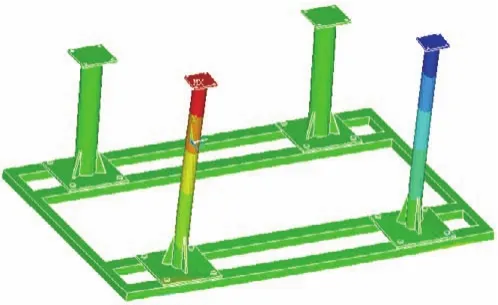
图4 二阶振型图

图5 三阶振型图
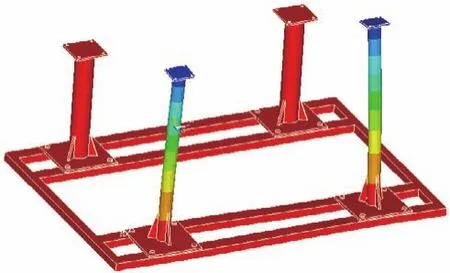
图6 四阶振型图
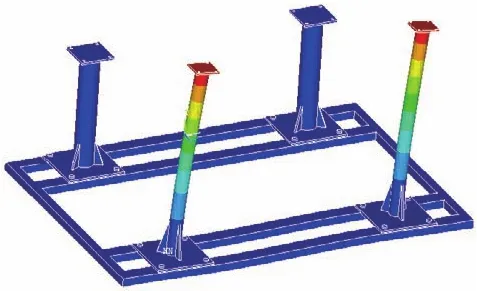
图7 五阶振型图
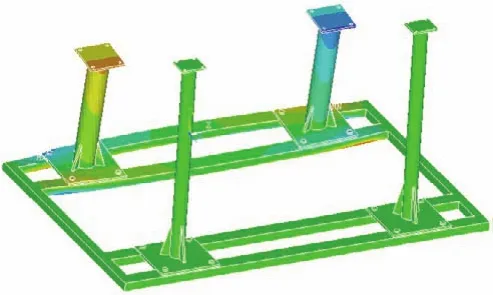
图8 六阶振型图
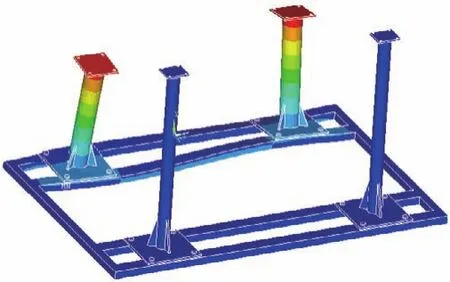
图9 七阶振型图
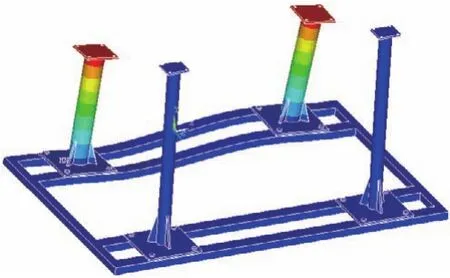
图10 八阶振型图
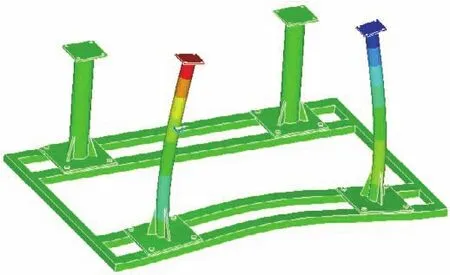
图11 九阶振型图
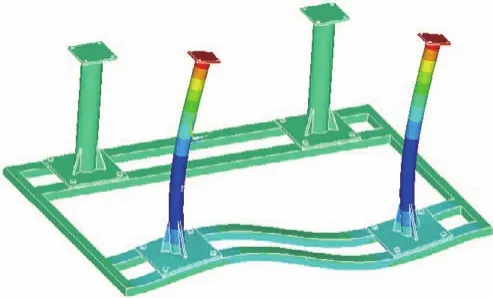
图12 十阶振型图
如图3-图12所示,一阶振型为左右两主手支承柱以z轴为中心轴向左右两侧异向摆动,主手底部连接两槽钢沿y轴上下振动。二阶振型左右主手支承柱连同底部连接两槽钢沿z轴前后同步摆动。三阶振型左右机械臂支承柱及其底部连接两槽钢以z轴为中心向左右两侧异向摆动,导致机械臂两连接槽钢中部上下振动。四阶振型为左右主手支承柱沿z轴前后异向摆动,底部连接两槽钢发生扭转变形。五阶振型为左右两主手支承柱以z轴为中心左右同步摆动。六阶振型为左右机械臂支承柱前后同步摆动,底部连接两槽钢上下异向振动。七阶振型左右机械臂支承柱沿z轴前后异向摆动,底部连接两槽钢发生扭转变形。八阶振型为左右机械臂支承柱以z轴为中心左右同步摆动,底部连接两槽钢弯曲变形。九阶振型左右两主手支承柱左右摆动并发生弯曲变形,底部连接两槽钢弯曲变形。十阶振型左右两主手支承柱上下振动并发生弯曲变形,底部连接两槽钢弯曲变形。
通过前十阶振型分析可以看出,主手支承柱和从手机械臂支承柱,以及与它们相连接的底部槽钢不仅有左右、前后的摆动,还有扭转变形,这些都将影响主从控制机械臂的强度和刚度。支承底架所受应力较大区域分布在从手机械臂支承两横向槽钢与底部两纵向连接杆周围,且应力最大点位于其连接处。因此,此处是支承底架最容易发生疲劳破坏的位置,应改进该处结构布置,适当增加该处的加强杆或加强筋来缓解之。
3.3 改进措施
在主手支承底部连接横向槽钢与从手机械臂支承底部连接横向槽钢处,增加两斜支承杆,来提高支承架的整体结构性能,重新构建支承架实体模型如图13所示。导入ANSYS进行有限元分析,划分网格得到66613节点和188369个单元,划分结果较理想,如图14所示。

图13 修改后三维实体建模
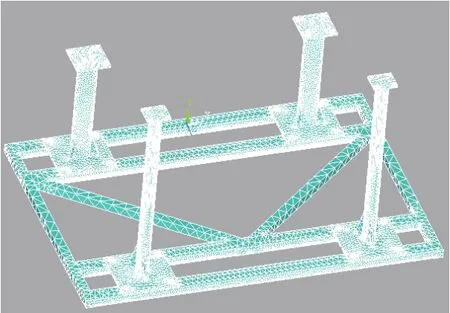
图14 修改后有限元模型
对修改后的模型进行模态分析,得到原结构和修改后结构的固有频率和最大变形量如表2所示。
由表2分析可以,修改后的结构各阶振型的固有频率都略有增加,并且阶数越大,频率的增加量越大,这主要是由于优化后的支承架刚度增大,可见结构修改后影响的是高阶模态。优化前后振型变化不大,修改后结构变形量明显减小,振动降低,优化效果显著,能够抑制因变形而对支承架造成的不良影响,达到了优化目的。

表2 结构修改前后固有频率和最大变形量
4 结束语
采用ANSYS有限元分析方法,得出了主从控制机械臂支承架约束模态的固有频率及相应振型,清楚了解系统结构的动态特性,找到了该支承架刚度薄弱环节并据此提出了相应的修改方案,进行机构的优化设计。通过优化设计的支承架达到以下效果:
1)优化后支承架最大变形量减小,振动降低,并能减小因支承架变形对主从机械臂使用性能的不良影响;
2)优化后支承架振型与改进前相比,支承架性能更稳定;
3)依据振型分析支承架性能,以此改进支承架结构,此方法极大提高了分析精度、设计质量并缩短了设计周期,为进一步改善支承架类刚度、改进支承架的结构设计提供了理论依据。
[1] GRIPS Manipulator System Manual.003-5005-00 Rev6.
[2] 周宁.ANSYS机械工程应用实例[M].北京:中国水利水电出版社,2006.
[3] 周长城,胡仁喜,熊文波. ANSYS11.0基础与典型范例[M].北京:电子工业出版社,2007.
[4] 朱伯芳.有限单元法原理与应用[M].北京:中国水利水电出版社,1998.
[5] 崔振家,汪鸿振.基于ANSYS的前传动系统模态分析[J].噪声与振动控制,2007,6:36-38.
