基于MAS的弹药装填机器人运动控制研究
2011-04-10韩振飞
徐 达,帅 元,韩振飞,夏 祥
XU Da,SHUAI Yuan,HAN Zhen-fei,XIA Xiang
(装甲兵工程学院,北京 100072)
0 引言
智能体机器人(Agent)是机器人领域近年来十分热点的问题,它以高度的灵活性、容错性和鲁棒性克服了以往集中式控制理念的不足,成为对机器人系统进行系统分析和设计的强有力的一种方法。在一个复杂系统中,系统整体往往可由许多个智能体按一定规则结合而成,通过采用基于协商的决策这就是多智能体系统(Multi-Agent System,MAS),它能够在相同环境中得到多种的解决问题方法,具有并行性、智能性和柔性。对于具有高智能特性的7自由度弹药装填机器人来讲由于对机器人的鲁棒性要求较高,所以运动控制的过程十分复杂。本文运用MAS方法,通过软件对七自由度弹药装填机器人运动轨迹进行了研究,得出了单关节失效时的运动轨迹。
1 弹药装填机器人运动控制结构
研究弹药装填机器人运动控制最为主要的工作是关节空间位置、速度、加速度以及所形成的运行轨迹。弹药装填机器人结构复杂普通关节空间地解算不利于快速和有效地克服关节故障产生的运动退化,而MAS系统具备高度的错容性,可以有针对性地对弹药装填机器人进行运动控制。
1.1 任务区分
对于弹药装填机器人的MAS系统来讲,设计的根本意义就是简化数学的模型,增加关节协作的次数从而达到克服故障的目的。这就要求将任务的目标作为实时解算的根本依据,所以首先要将任务进行有效的区分。
1)协调任务目标:在整个协作过程中,除了必须存在多个参与协作实现协作目标的参与者外,还存在负责MAS协作的协调者。协作协调者的任务主要是一方面提出协作需求,并对协作目标进行规划;另一方面,协调者还负责根据竞争者的条件挑选恰当的协作伙伴。
2)控制任务目标:由协调Agent在特定的情况下产生。本文假设特定的情况为无法达到预定的装填位置而采用保持空间中两个坐标不变,第三个坐标微调适应的原则。
3)实时任务目标:预定任务目标是依赖于前面协调任务的结果而由产生的新的能达到预定目标的实施方案,其具有实时的特性。
4)子任务目标:实时任务目标体系内独立的Agent应当完成的任务,以及当完成的关联协作。
5)预定目标:最终应当完成的装填任务。

图1 MAS设置方案
设计该模型主要的思路是功能和目标分离,以目标为主;规划和目标实时交互,突出规划对于目标的影响和指导,体现目标对于规划的补充和延伸。
1.2 弹药装填机器人智能体设置方案
将整个弹药装填机器人臂手结构设计成五个智能体和一个协调智能体,如图1所示。
分别将各个智能的关节设计为简单的反应式Agent,分别是:

表1 智能体设置方案

图2 控制体系
1.3 弹药装填机器人控制体系
本文采用分布式的控制体系如图2所示,主要思想就是:在协调SAgent收到工作的任务目标的时候,通过知识库得出各个Agent的子任务目标,以及各个Agent协调工作顺序的相关信息,并立即将其传递给每一个Agent;然后单个Agent在自己的知识目标中找到子任务目标,以及相关的规划信息,根据当前所有信息得出完成方案并执行。执行过程中实时的将信息传递到每个Agent以及SAgent处,实时的优化运动方案。
2 面向任务域完全协作设计
各Agent在工作的过程中需要进行实时协作,本文根据弹药装填机器人MAS系统各个智能体之间相互独立,但是却又共享协作的工作模式设计出基本的面向任务预的协作函数,以及应当具备的协作策略。
协作方式可以分为两类:单Agent协作方式以及MAS在SAgent协调下的联合协作方式。单Agent协作主要是指进行单个Agent之间的通信与协调,而其他不相关Agent保持原来的状态。MAS在SAgent协调下的联合协作方式是指,SAgent进行多个Agent同时协调控制。两种控制方式具体通信过程如下:
1)单Agent协作方式:单个Agent和Agent之间的协作。首先由任务Agent向协作Agent发送指令,设置新的目标位置或者查询当前位置,之后等待。协作Agent收到指令后必须应答,任务Agent在收到应答信息后才能发送新的指令或重发上一次的指令。任务Agent等待应答的时间为1ms上限为,若超过此上限,则主计算机将发送新的指令或重发上一次的指令。
2)MAS在SAgent协调下的联合协作方式是指:进行位置控制时,SAgent首先依次对单独的Agent控制器设置任务,每一次只和某个Agent通信,当确认所有应答无误时,主计算机采用广播方式发送一条启动指令,命令所有Agent按预定指示开始工作。
3 基于MAS弹药装填机器人运动控制鲁棒性试验
3.1 程序设计
7自由度弹药装填机器人如图3所示,之间的关节角为θp(p=1,2,......,n)记末端的执行机构的坐标为E(xe,ye,ze)末端执行器期望轨迹上任意一个点T(xd,yd,zd)利用齐次变换矩阵的方法可以得出关于执行机构的坐标和各个关节角之间的关系:


图3 弹药装填机器人机构简图
我们取相对的位移差得到:

理论上是当D(δx,δy,δz)=0时弹药装填机器人的任务才算是完成,即末端执行器已经到达了指定的位置。假设三个坐标轴的方向上的相对距离θp的梯度分别为Gxp(θp)、Gyp(θp)和Gzp(θp)。在迭代求解过程中,采用的决策应保证D(δx,δy,δz)沿其梯度方向减小,否则θp应保持静止。
在研究的过程中发现机器人的工作过程中受到了空间和关节角度的影响,其运动能力应当出现一定的退化所以本文构造简易的车内空间假设在装填弹药的过程中只要能够满足z坐标,x和y坐标能有微小的变化就能完成弹药的装填。
采用简单的控制策略为:

式中:θp,max和θp,min分别为机器人的第p个关节角动作范围上、下限;αp为动态步进角,即:

λp为定常的正值比例系数,用以将:
3.2 实现过程
设计时钟变量timer()进行实时的跟踪可设时间间隔为1s,在SAgent变量中设计多种规划为装填位置沿y轴方向上的每隔5mm的一个目标集合G={g0,g1,g2,...,gn}优选顺序为:

其中g0是预定的无故障平台时候的装填机器人轨迹。然后通信各个Agent接收到SAgent发送的gi信号后得出自己的子任务,然后按照预定的计划完成任务。通过仿真得出一下结果如图4所示

图4 无故障平台时的位置轨迹

图5 轨道失效退化后的位置轨迹

图6 基座失效后的位置轨迹
从图5轨道Agent失效后弹药装填机器人的退化后的轨迹和实时姿态可以看出轨道故障后弹药装填机器人仍然能够到达预定的装填位置完成装填的任务。
基座Agent失效后弹药装填机器人退化后无法达到预定的位置,此时SAgent在收到信息后根据算法给出另外的目标Si,然后各个子Agent得出运行轨迹如图6所示。

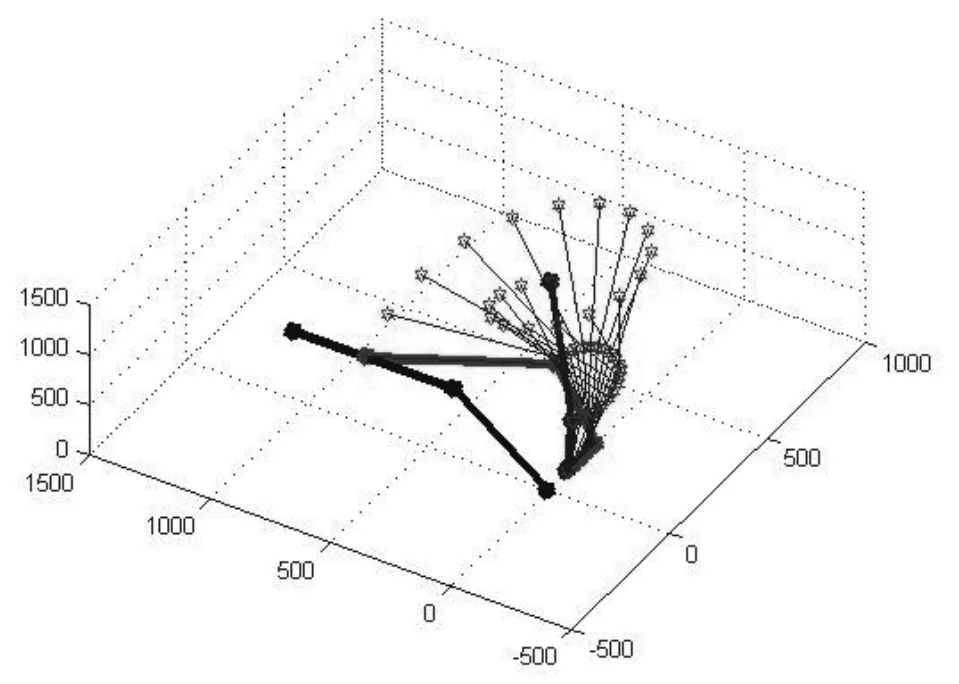
图7 大臂失效后位置轨迹
根据图像显示根据,基于MAS的运动控制方法能够简单的进行柔性控制达到机器人整体鲁棒性能的提高。
4 结束语
本文提出了一种基于MAS的具有较高错容性的弹药装填机器人运动控制方法,将弹药装填机器人看成是由MAS系统组成,同时由一个协调SAgent进行协调控制运动。弹药装填机器人完成预定的装填目标时,将装填任务分解各个Agent的子任务,而各个Agent又独立完成子任务并由SAgent进行时钟协调运动控制最终完成预定目标。这种方法的好处有以下四点:
1)弹药装填系统的工作能力可以通过增加预定的规划数量,就可以在弹药装填机器人可达空间内增加工作方案;
2)在MAS系统内,可以有效的进行规避障碍物和克服关节故障带来工作难题,提高弹药装填机器人的柔性和鲁棒性;
3)该方法比较过去的并行控制的模式具有更高的灵活性和可靠性;
4)通过仿真实验,MAS系统具有很好的环境适应能力,鲁棒性较好,能够保证在动态、不确定环境下实时地进行运动控制。
[1] 王中盛.弹药装填机器人轨迹规划及动力学分析[D].装甲兵工程学院,2008.
[2] 宁可军,杨汝清.基于多智能体的机械臂嵌入系统控制[J].上海交通大学学报,2005.
[3] 王汝传.智能体技术在信息网络中的应用[M].工业出版社,2006.
[4] Jorge Angeles theory,technique and arithmetic of mechanical System[M].机械工业出版社,2008.
[5] 刘金坤.机器人控制系统的设计与仿真[M].清华大学出版社,2008.
