烹饪机器人翻锅运动最优化设计
2011-02-10闫维新马文涛赵言正周晓燕
闫维新,马文涛,付 庄,赵言正,周晓燕
(1. 上海交通大学机器人研究所 上海 闵行区 200240; 2. 扬州大学旅游烹饪学院 江苏 扬州 225009)
中式菜肴以烹调方法多样、操作程序极为复杂闻名于世[1],烹饪机器人的出现迎合了中式烹饪工业化需求。中式菜肴特定烹饪动作是区别于西餐的重要特点之一。本文介绍了锅具运动机构及翻锅动作机理,对锅具物料在特定烹饪动作中进行了运动学和动力学分析,给出了数学模型和仿真计算。通过大量实验表明,该方法能高效地复现厨师的烹饪动作,满足锅具运动要求。
1 自动烹饪机器人
中国菜肴烹饪机器人能够根据指令自主地完成烹饪,机器人由人机界面、投料机构、锅具动作机构、中间出料机构、火候视觉模块和盖锅机构组成。烹饪机器人各模块的介绍可参见文献[2]。锅具运动机构示意如图1所示,根据锅具运动学分析,将实现烹饪机器人自由度要求的锅具运动机构进行简化,可完成实际的锅具运动部件,以及晃锅、倾倒和翻锅(分小翻和大翻)等特殊动作。电机1带动曲柄使滑杆做往复运动与摆动,锅具与滑杆连成一体,在滑杆做往复运动与摆动的过程中,锅具中心做近似椭圆的变速运动。电机2通过锥齿轮使滑杆(包括锅具)做旋转运动,从而使锅具实现翻动和倾倒动作。上述装置安装在一个运动平台上,由其他电机驱动实现整体平移。该运动机构的运动合成使锅具机构实现翻动、水平移动和晃动[3]。
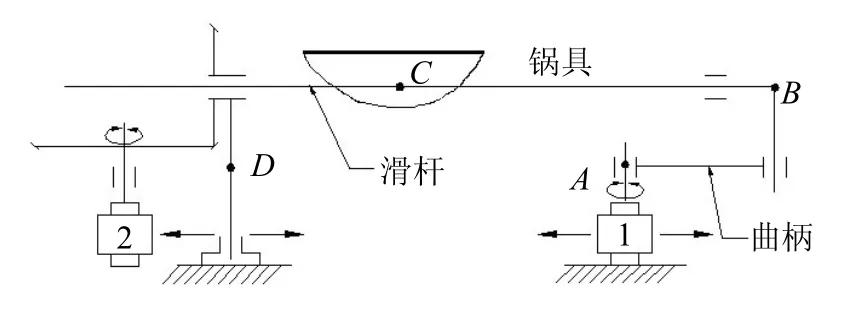
图1 烹饪机器人锅具动作机构原理图
采用大力矩直流伺服电机作为动力源,将电机的力转换为锅的快速翻动,通过锥齿轮传动到锅的轴心上,从而实现翻锅。通过示教系统获得厨师翻锅动作时锅具中心的运动轨迹和速度曲线,假设质量点m,对其运动曲线进行运动学和动力学分析,得到运动轨迹。由于锅具运动部件实际的自由度小于厨师的自由度,最后需通过最优化方法进行质量点m运动轨迹拟合。可以将锅具运动部件理解为约束的多刚体系统,利用经典刚体动力学理论来描述复杂力学系统的动力学行为[4]。
2 翻锅动作的动力学和运动学分析
对于质量点m,建立其位于锅具中的运动学和动力学模型,对翻锅动作进行约束假设,建立在假设基础上的质量点m状态方程。通过仿真模拟质量点m在厨师完成翻锅动作时的轨迹,在锅具机构现有自由度基础上进行参数最优化,实现质量点m运动轨迹效果最优化逼近[5]。其核心是分析现有机构动件上受力物体的轨迹、位移、速度、加速度等,按预期的运动规律设计参数以达到所需运动要求[6]。
2.1 质量点m受力分析
以图2球心为原点,建立锅体连体坐标基ep:O-X-Y-Z,X、Y坐标轴的方向与X3-O-Y3的方向相同,锅面上任何一点的坐标都可由下式确定为:
质量点m所处位置(R,δ,γ)处建立坐标基em:Om-Xm-Ym-Zm,其中Om点坐标由式(1)决定,Xm正方向指向锅体圆球面的球心,Ym正方向沿着圆球面的纬线,逆时针指向,Zm由右手定则决定[7]。

图2 坐标系em和ep直间的几何位置关系图
翻锅过程中,对锅中的质量点m进行运动分析,首先将锅体的运动速度矢量从ep转化到锅面上的质量点m处的em中,对于由(R,δ,γ)确定的m点在锅面上的对应点,有:

同样,基于图2所示的几何关系和基ep同em之间的转化矩阵,确定质量点m处锅体对应点的速度矢量和加速度矢量分别为:

锅具控制属于不确定机器人系统的控制,在实际工程中要得到精确的数学模型,需要在建立机器人数学模型时做合理的近似处理和假设,忽略一些不确定因素,例如参数不确定性、非参数不确定性和作业环境干扰及驱动器饱和等问题[8]。在基em中,针对特定烹饪动作,在如下两种假定情况下,对质量点m的运动情况进行分析:
1) 质量点m在基em中的x和y方向速度为零,只有z方向运动,即m只沿着锅面的某条经线运动,不发生从一条经线运动到另一条纬线的情况(类比行星处于自身轨道,不发生越轨现象);
2) 质量点m在基em中只有y和z方向速度,x方向速度为零,即m沿着锅面的某条纬线和经线都运动。
质量点m处的坐标系如图2所示。对于情况1),参照图2对质量点m进行受力分析[9]。
1) x方向静止:

N为锅面作用于质量点m的压力。
2) y方向静止:

F为质量点m在y方向所受的运动阻力,是非线性的量,它将m维持在某一个经度上,具体数值随着锅的运动而改变。
3) z方向运动:



上述分析是针对质量点m处于锅体某个固定点处进行的。当m处于不确定位置时,参数将不同,很难建立m在整个锅体内的运动描述方程,只能在锅面上的某个特定点建立如式(5)和式(9)中质量点m的运动方程。翻锅过程中,质量点t1时刻从锅面边沿脱离后,将不再受摩擦力等作用力,其运动轨迹是具有初速度的一条抛物线,计算模式应该由锅面内的运动模式转换到锅面外的抛物线运动模式。在飞行过程中,每个计算周期都需要计算质量点相对锅体坐标系的位置矢量,并检验该位置矢量是否位于锅面内,如果不是,表明质量点m还在飞行过程中,则继续按照抛物线的计算模式计算m的轨迹;如果是,则表明质量点已重新落回锅面中的坐标,这时应该将计算模式从抛物线计算模式切换回锅面运动状态模式。
2.2 质量点在翻锅过程中的运动轨迹
t1时刻的确定需要从锅体大翻的运动特性分析入手,示教系统采集数据经过高次曲线拟合、差分等数据处理之后,得到的锅体大翻运动过程中的状态变化规律(在基e3中)。包括锅心的Y/Z向速度,绕X轴转动的角度θ、角速度ω和角加速度变化曲线,其中t1时刻满足:

从运动情况来看,t1时刻是质量点m脱离锅面的时刻,因此,在本文对锅体大翻过程所做的运动学仿真分析过程中,设定t1时刻的判断逻辑为:

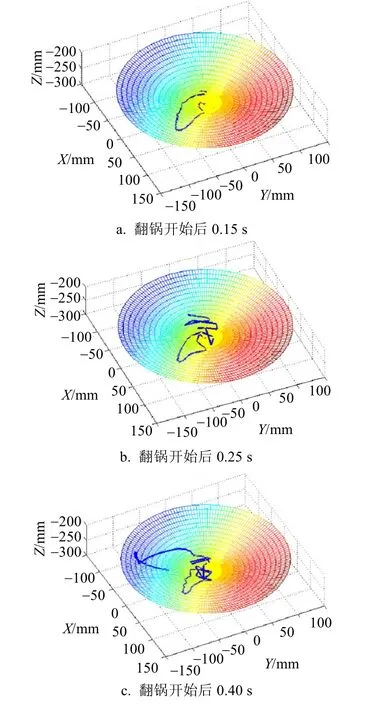
图3 厨师翻锅时质量点m在不同时刻相对锅体坐标系的运动轨迹
图3给出了厨师翻锅开始后0.15、0.25和0.40 s时刻质量点m的运动轨迹。图3a中的轨迹为m脱离锅面之前,相对锅面坐标系的运动轨迹;图3b为m刚开始脱离锅面时相对锅面坐标系的运动轨迹;图3c为m完成抛物线运动回落到锅中后,相对锅面坐标系的运动轨迹[10]。
3 烹饪机器人翻锅运动最优化实现
目前的翻锅机械在结构上不存在Z方向上的自由度,只能依靠Y轴上的移动自由度和绕X轴的转动自由度实现翻锅运动。为了能使机械翻锅的过程取得与厨师翻锅过程相近的效果,需要对翻锅机械的控制参数进行优化设计,优化的目标是使质量点m能飞出满意的抛物线轨迹,并且脱离锅面飞行之后仍能落回锅中。根据翻锅周期内的锅心运动状态变化曲线之间的相互关系,考虑到锅具缺少了Z轴上的速度分量对质量点m的影响,对各条变化曲线进行适当的修改,可设计如图4所示的运动规律。

图4 优化锅具转动角速度后得到的质量点m相对锅具在不同时刻运动轨迹
图中t1时刻前,锅心沿Y轴正方向运动,锅体转角在该过程中绕X轴反方向倾斜一个比较小的角度之后,在t2时刻又回到零度位置,此时,锅心仍以较大的Y向速度运动,可以保证质量点m相对锅面仍按照原来的速度方向运动,即往纬度高的地方继续运动,同时锅体的转角继续增大,到t1时刻质量点m离开锅面时,m相对锅面的Y向初始速度为负值,可保证m仍会重新落入锅中。
图4中给出的优化曲线只是众多优化结果的一种,由于本文只是在理论上进行研究,并且仿真参数与实际情况肯定不同,因此可按照本文提出的优化思路优化运动规律。
4 实验及结论
本文使用锅具运动最优化方法的烹饪机器人烹制了对锅具运动要求极高的菜肴(水晶虾仁、宫爆鸡丁、糟香鱼柳和波罗咕噜肉等),并邀请了多位中国菜肴美食家进行评分。烹饪机器人在烹饪水晶虾仁中完成翻锅动作与厨师动作的对比照片如图5所示,虽然烹饪机器人在锅具运动中比厨师真实动作的自由度少,但通过动作最优化算法进行运动效果逼近,完全可以使物料在锅具中翻动,实现翻锅。

图5 烹饪水晶虾仁的翻锅对比过程
5 结 论
本文介绍了烹饪机器人翻锅运动最优化方法,包括锅具运动机构及翻锅实现方法。假设质量点m在锅具内的运动情况,对物料在翻锅动作中进行受力分析,给出其状态方程,进行翻锅运动曲线下物料运动轨迹的仿真,最后通过优化曲线在缺少自由度的情况下完成了物料运动轨迹最优化实现,得到以下结论:
1) 使用该方法的烹饪机器人锅具运动可以有效地实现烹饪动作中的翻锅动作,实现物料在锅具中的翻动效果;
2) 该方法不仅可应用于翻锅动作,还适用其他烹饪动作(如晃、倾、离)。
本文的方法是在一系列假设前提下进行的,不能覆盖所有的烹饪规则。当不同物料、不同烹饪工艺,物料种类发生变化或者处于不同加热时期的物料,需要额外的约束条件完成仿真和最优化实现。
[1] 谢朝武. 关于中式菜肴标准化的若干理论思考[J]. 饮食文化研究, 2005, 30(2): 80-84.
XIE Chao-wu. The theoretical thoughts about the standardization of Chinese dish[J]. Dietetic Culture Research, 2005, 30(2): 80-84.
[2] YAN W X, FU Z, LIU Y H, et al. A novel automatic cooking robot for Chinese dishes[J]. Robotica, 2007, 25(4): 445-450.
[3] 刘银华, 闫维新, 刘小勇, 等. 曲柄摇块机构在自动烹饪机器人中的应用[J]. 机械工程师, 2006, (5): 64-65.
LIU Yin-hua, YAN Wei-xin, LIU Xiao-yong, et al. The application of crank-rock mechanism in automatic cooker[J].Mechanical Engineer, 2006, (5): 64-65.
[4] STEWART D E, TRINKLE J C. An implicit time-stepping scheme for rigid-body dynamics w ith inelastic collisions and Coulomb friction[J]. International Journal Numerical Methods in Engineering, 1996, 39: 2673-2691.
[5] 王小忠, 孟正大. 机器人运动规划方法的研究[J]. 控制工程, 2004, 11(3): 280-284.
WANG Xiao-zhong, MENG Zheng-da. Research of robot motion planning[J]. Control Engineering of China, 2004,11(3): 280-284.
[6] 赵景山, 冯之敬, 褚富磊. 机器人机构自由度分析理论[M]. 北京: 科学出版社, 2009: 112-120.
ZHAO Jing-shan, FENG Zhi-jing, CHU Fu-lei. Analytical theory of degrees of freedom for robot mechanisms[M].Beijing: Science Press, 2009: 112-120.
[7] 张涌, 戈新生. 一种新坐标描述多体系统动力学及仿真软件[J]. 北京机械工业学院学报, 1998, 13(4): 49-54.
ZHANG Yong, GE Xin-sheng. Multibody system dynamics described by fully cartesian coordinates and simulation software[J]. Journal of Beijing Institute of Machinery, 1998,13(4): 49-54.
[8] 刘金琨. 机器人控制系统的设计与MATLAB仿真[M]. 北京: 清华大学出版社, 2008.
LIU Jin-kun. Design and MATLAB simulation of robot control system[M]. Beijing: Tsinghua University Press,2008.
[9] 洪嘉振, 杨长俊. 理论力学[M]. 北京: 高等教育出版社,2002.
HONG Jia-zhen, YANG Chang-jun. Theoretical mechanics[M]. Beijing: Higher Education Press, 2002.
[10] 武娟, 任家骏, 吴凤林, 等. 基于MATLAB软件中SIMULINK的机构运动仿真[J]. 机械工程与自动化,2004, (3): 4-6.
WU Juan, REN Jia-jun, WU Feng-lin, et al. Mechanism kinematics simulation using SIMULINK in MATLAB[J].Mechanical Engineering and Automation, 2004, (3): 4-6.
编 辑 黄 莘
