一种圆筒形压电直线电机的设计及实验研究
2011-01-29陈培洪黄卫清
陈培洪 王 寅 黄卫清
南京航空航天大学,南京,210016
一种圆筒形压电直线电机的设计及实验研究
陈培洪 王 寅 黄卫清
南京航空航天大学,南京,210016
为研制具有高分辨率、宽频响、大行程的压电直线电机,提出了一种基于叠层压电陶瓷的圆筒形压电直线电机,并利用碟形弹簧对叠层压电陶瓷进行预紧。在分析电机工作原理的基础上对电机的结构进行了设计,并制作了原理样机,对其进行了实验研究。实验测定结果如下:在一定频率范围内定子驱动足输出振幅最大值为2μm,电机最大无负载速度为3.7mm/s,最大输出推力为4.3N。
压电直线电机;叠层压电陶瓷;碟形弹簧;非共振;实验研究
0 引言
近年来,压电作动器在精密定位领域得到了关注[1]。压电作动器以其高控制精度、快响应速度、高能量密度、不受电磁干扰、功耗低、无运动转换机构和断电自锁等特点,在生命科学、医学、生物工程、集成电路制造、超精密加工、光学、测量技术和微机电系统等领域有着广阔的应用前景[2-3]。
压电直线电机是利用压电元件的逆压电效应激发弹性体的微幅振动并通过摩擦将微幅振动转换成动子宏观的直线运动,从而直接推动负载。直线超声电机定子一般工作在共振状态,利用共振放大驱动足的振幅,以获得更大的速度和位移输出。共振状态受温度影响较大,定子共振频率会随温度的改变而发生偏移,导致工作频率漂移,影响电机的正常运行。随着压电陶瓷制作工艺的发展,为克服压电陶瓷输出应变小的阻碍,叠层压电陶瓷应运而生[4]。叠层压电陶瓷在较小的电压下能有较大的位移输出,无需共振便有足够的振幅来驱动动子,从而提高了作动器的稳定性。此外,叠层压电陶瓷的输出振幅与输入电压成正比,理论上可以达到无限小的分辨率,因此,利用叠层压电陶瓷制作的作动器可以获得较高的精度和可控性。目前,国外某些研发机构已经应用叠层压电陶瓷研制出压电作动器,并实现了工业应用[5-6]。
本文基于叠层压电陶瓷研制了一种圆筒形压电直线电机,在分析电机工作原理的基础上对电机结构进行了设计,并制作样机进行了实验研究。国内黄卫清等[7]、李艳林等[8]已做过这方面的研究,其中黄卫清等[7]研制的电机结构利用的是杠杆原理,驱动足沿压电陶瓷输出方向位移减半,而本文是利用压电陶瓷直接输出位移,这与黄卫清等[7]研制的电机结构不同。实验结果表明该电机可在相当宽的频带内稳定运行。
1 电机结构和工作原理
本文提出的电机结构如图1所示。图1a所示为压电作动器结构,由驱动轴、碟形弹簧、钢球、陶瓷支撑、叠层压电陶瓷、前端盖、后端盖及圆筒组成。图1b所示为电机整体结构,由定子、夹持装置、底板及动子组成,其中定子由两个轴线成90°的圆筒形压电作动器通过驱动足连接而成,并通过夹持装置固定在底板上。
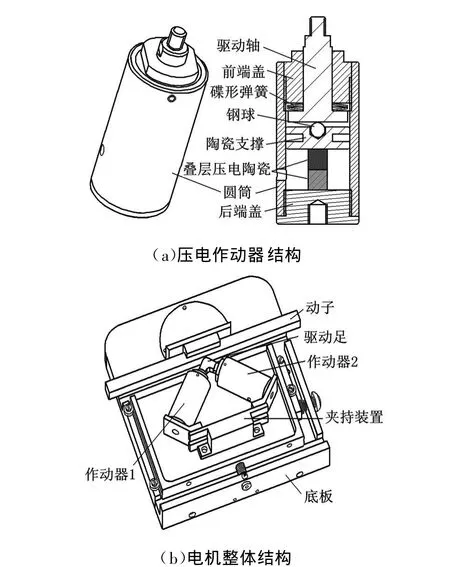
图1 电机结构图
叠层压电陶瓷对正弦信号的位移响应曲线类似于正弦波形[9-10]。通过施加压电陶瓷两路相位差90°正弦激励信号,激发两作动器1和2的压电陶瓷分别沿驱动轴的轴线方向振动,这两压电陶瓷的位移响应也为正弦波形,且空间上相差90°。设作动器1、2的压电陶瓷的激励信号对应的振动位移响应函数分别为式中,A、B为对应压电陶瓷的位移响应幅值(由于装配误差导致的压电陶瓷的位移响应幅值存在差异);α、β为对应激励响应的相位角。

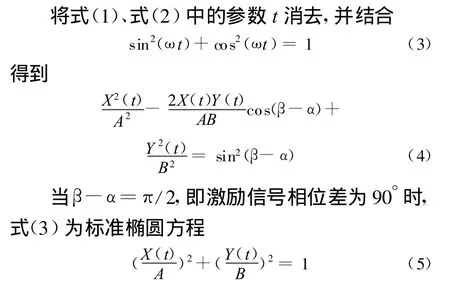
可见当两作动器压电陶瓷振动位移响应相位差为90°,即对这两组压电陶瓷施加相位差为90°的两相驱动电压时,这两个位移响应在驱动足端部形成椭圆运动,改变激励信号的相位,可实现电机的正反转。驱动足端部质点椭圆运动过程如图2所示。
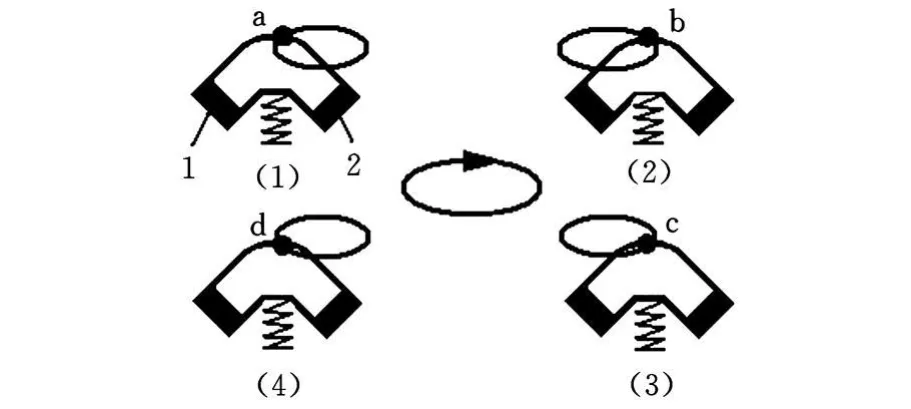
图2 一个周期内驱动足的运动轨迹
从驱动足运动轨迹图2可看出,正弦激励信号驱动形成的驱动足轨迹为椭圆,驱动足在整个周期内连续运动。从(1)到(2)的运动过程中,驱动足推动转子运动,从(3)到(4)的运动过程中,驱动足与转子脱离接触,整个运动过程中由弹簧提供定子与动子之间的预压力。
2 电机结构设计
2.1 定子结构设计
2.1.1 预紧碟簧的选择
压电陶瓷采用江苏联能电子技术有限公司生产的QD-YD系列叠层压电陶瓷,其规格尺寸为6.5mm×6.5mm×5mm,根据其性能要求,施加预紧力在300~400N范围,查《机械零件设计手册》中关于碟簧的选型,综合考虑碟簧的外廓尺寸及变形量要求,选用参数为D=16mm、d=8.2mm 、t=0.4mm 、h0=0.5mm 、H=0.9mm 的碟簧作为预紧碟簧[11]。
通过实验的方法,采用两片碟簧对合组合方式,对所选碟簧进行刚度测量实验。实验结果表明,所选碟簧满足在变形量为0~1mm范围内提供0~400N弹性力的要求,所用叠层压电陶瓷预紧力符合要求。测得的碟簧加载与其高度变化曲线及加载装置如图3所示。

图3 碟形弹簧加载实验
从图3a中可看出,碟簧在受到300~400N预紧力时其变形量呈线性变化,而碟簧本身是非线性弹性元件(从刚度曲线图中可看出)。实验过程中也发现,在这曲线段内碟簧加载时不会出现碟簧变形相反的现象,即不会出现碟簧提供弹性力不足的现象。采用此参数的两片碟簧对合组合方式满足碟簧实施微量调节来施加叠层压电陶瓷预紧力的要求,故选取此碟形弹簧作为预紧弹性元件。
2.1.2 预紧结构设计
实验表明,根据叠层压电陶瓷的输出特性,叠层压电陶瓷激发的振幅大小与激励电压和驱动频率有关,而在一定的压力作用下,叠层压电陶瓷输出位移增加,迟滞度减小[12]。因此压电作动器需要设计适当的结构给压电陶瓷施加一定的预紧力,而为了利用先前通过实验的方法方便测量压电陶瓷的预紧力,同时又能够通过设计一适当的机构找出压电陶瓷合适的预紧力,将陶瓷预紧部分结构设计成预紧力可调的结构。预紧力结构图见图4。
由上述碟簧刚度实验分析可知,采用两片碟簧对合组合方式施加压电陶瓷预紧力,其振动位移由陶瓷支撑经钢球传递至驱动轴输出。压电陶瓷的位移输出数量级为微米级,其陶瓷预紧部分的碟簧变形需满足:
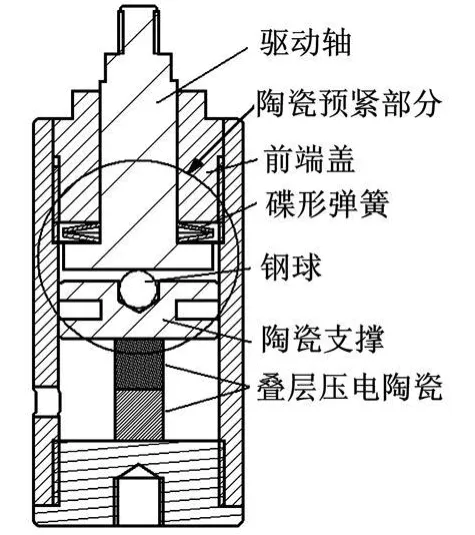
图4 预紧力结构图
式中,F为碟簧产生的弹性力,即施加到压电陶瓷上的预紧力;Kmax为碟簧变形最大刚度。
如F/K max小于1μm,将影响压电陶瓷的位移输出。
驱动轴与前端盖之间为间隙配合,在电机工作时允许驱动偏转。采用钢球连接方式,一是保证压电陶瓷的位移输出沿驱动轴线方向;二是避免电机工作时因驱动偏转影响陶瓷的位移输出,进而影响电机的输出性能;三是避免陶瓷承受切向作用力。通过调节前端盖进给量使碟簧产生变形,控制其调节量以提供合适的预紧力。
2.2 夹持结构设计
电机夹持装置不但承担定子与动子的连接,而且具有加载、调节预压力和限制定子自由度的作用,理想的夹持结构应限制定子在空间上的5个自由度,仅保留一个自由度并在这个自由度方向上采用合适刚度的弹性支撑。而因机构装配关系及零件加工误差影响,实际夹持结构难以做到只保留定子一个自由度要求,即仅保留y方向平动自由度,其他所有自由度都受限制,图5所示为实际夹持结构模型。
夹持装置对定子不完全约束的3个自由度分别对应3个刚度k1、k2、k3,而这3个量的大小及相对关系将影响整个电机的性能。经理论分析,k1、k2、k3需满足以下条件:


图5 实际夹持结构模型图
由上述对夹持结构要求的分析,本文设计的夹持结构如图6所示。

图6 实际夹持结构图
采用3个圆柱滚子作为支撑点,将电机固定在夹持装置上并安装在底板上,整个电机及夹持装置只能沿y方向移动。通过使预压力弹簧变形产生弹性力提供电机定子与动子之间所需预压力,预压力大小可由力传感器测量,调节其加载大小,使电机工作在稳定状态。
3 电机实验研究
3.1 电机的输出特性
根据上述设计制作了电机样机,其压电作动器实物图和电机整体实物图见图7。
压电作动器结构尺寸总长为54mm,直径22mm,除前端盖采用黄铜外,其他都为硬铝。电机驱动足采用45钢,所用动子为钢性材料导轨,其夹持装置及底板均采用硬铝。

图7 电机实物图
3.1.1 定子驱动足输出振幅与频率的关系
压电陶瓷输出位移即为作动器驱动沿轴线方向的输出振幅,与驱动电压成正比关系。通过使用Po ly tec公司的PSV-300F-B型高频扫描激光测振系统,测量定子在不同电压下驱动足振幅随频率的变化。给压电陶瓷分别施加60V、90V、110V,正向偏置分别为30V、45V、55V 的正弦激励信号,测量驱动足端部与动子接触点的振幅响应,测量结果如图8所示。

图8 驱动足振幅-频率曲线
由图8可知,随驱动电压的增大,驱动足振幅增大,当驱动信号频率小于1.1kHz,电压为110V时,驱动足端部振幅在一定频率范围内保持不变,且最大幅值为2μm。
3.1.2 电机速度与频率的关系
电机输出速度取决于驱动足的振动速度,而振动速度由振幅和频率共同决定。图9所示为电机运行速度随频率变化的曲线。从图9中可以看出,电机速度随频率的增大而增大,但当频率大于1.1kH z时,速度又开始减小。当电压为 100V,驱动频率为1.1kH z时,电机最大无负载速度为3.7mm/s。

图9 电机速度-频率曲线
3.1.3 电机机械特性曲线
图10所示为电机的机械特性曲线。从图10中可以看出,电机速度随输出推力的增大而减小,电机最大输出推力为 4.3N,此时驱动频率为1.05kHz,驱动电压为100V。

图10 电机机械特性曲线
3.2 讨论与分析
由于电机工作在非共振状态,压电陶瓷的振幅决定了驱动足端部的振幅,因此可以认为驱动足端部振幅应与压电陶瓷类似,在一定频率范围内保持不变(图8)。文献[7]中电机驱动足结构是利用杠杆将压电陶瓷输出位移传输到驱动足,其振幅实际减小了一半,与其相比,本文利用压电陶瓷位移直接输出到驱动足端部,提高了驱动足在垂直于动子方向的横向输出振幅。而驱动足端部沿作动器驱动方向的振幅影响电机的输出力,即输出振幅大,驱动足与动子接触时间长,接触面增大,致使摩擦驱动所需的正压力增大,即增大了摩擦驱动力,使电机输出力增大。因此,提高驱动足端部振幅是增大电机输出力的关键,而叠层压电陶瓷本身的特性决定了其输出振幅的大小,主要与以下两点相关:
(1)提高压电陶瓷的驱动电压。针对叠层压电陶瓷要求的低压驱动,驱动电压不能超过110V,否则陶瓷发热会严重影响性能输出。
(2)提供压电陶瓷合适的预紧结构刚度。在电压一定的条件下,驱动足的振幅与电机自身结构刚度有关,即与施加压电陶瓷的预紧力结构刚度相关。分析并找出合适的预紧结构刚度,是提高驱动足输出振幅的前提。
由上述分析可知,电机运行速度与驱动足端部沿作动器驱动方向振动速度成正比,所以当驱动足在这一方向的振幅不变时,可以认为电机的输出速度与驱动足端部的振动频率成正比,即与激励信号的频率成正比。从图9可以看出,电机在实际运行情况下动子的运动速度近似与驱动频率成线性关系,由此可知,非共振式电机可在一定频率范围内任意频率点工作且工作频率可调,这与共振式电机只能在定子共振频率附近工作有很大的不同。而当驱动频率大于1.1kH z时,电机速度减小,分析原因是由于叠层压电陶瓷固有电容很大,给驱动器造成很大负担,驱动器发热严重,而且由于电机共振频率低,容易发生共振,影响电机运行的稳定性。与文献[7]中电机所使用的压电陶瓷相同,当驱动频率大于2kHz时,因超出了驱动器的负载能力,所以电机将无法正常运行。
根据电机的机械输出特性曲线分析可知,由于电机的输出推力除了与驱动足端部振幅有关外,还与预压力和摩擦因数有关,而摩擦因数取决于驱动足和转子的材料,这样,在激励电压和频率一定的情况下,施加于驱动足与转子间预压力的大小决定了输出推力的大小。从图10可以看出,随着电机输出推力的增大,速度呈现出由快到慢的变化趋势。
4 结语
本文使用叠层压电陶瓷设计并制作了一种圆筒形压电直线电机,分析了电机的工作原理,对电机的结构进行了设计。该电机具有结构简单、装配方便等特点。在工作频率为1.1kH z时,电机的最大输出速度为3.7mm/s,最大输出推力为4.3N。
[1] 赵淳生.世界超声电机技术的新进展[J].振动、测试与诊断,2004,24(1):1-5.
[2] 赵淳生.超声电机技术与应用[M].北京:科学出版社,2007.
[3] Pozzi M,King T.Piezoelectric Actuators in M icropositioning[J].Engineering Science and Education Journal,2001,10(3):31-36.
[4] 李国荣,陈大任,殷庆瑞.PZT系多层片式压电陶瓷微驱动器位移性能研究[J].无机材料学报,1999,14(3):418-424.
[5] K im J,Lee Jin-Ho.Self-moving Cell Linear Motor Using Piezoelectric Stack Ac tuators[J].Smart Materials and Structures,2005,14:934-940.
[6] Salisbury SP,Waechter D F.Design Considerations for Comp lementary Inchw orm Actuators[J].IEEE/ASME Transactions on Mechatronics,2006,11(3):265-272.
[7] 黄卫清,孟益民.一种新型非共振压电直线电机的设计[J].中国机械工程,2009,20(14):1717-1721.
[8] 李艳林,黄卫清.一种低频大行程直线型压电电机的研究[J].压电与声:2009,8(4):507-509.
[9] 温建明.新型惯性压电叠堆驱动机构的研究[D].吉林:吉林大学,2006.
[10] 陶继增,王中宇,李程.压电叠堆在正弦电压激励下振动位移特性的研究[J].计测技术,2006,26(6):20-22.
[11] 东北工学院《机械零件设计手册》编写组编.《机械零件设计手册》[M].2版.北京:冶金工业出版社,1980.
[12] 郑凯,阎绍泽,温湿铸,等.预压力对压电叠层作动器性能的影响[J].压电与声光,2003,25(5):363-365.
Study on Design and Tests of a Piezoelectric Linear Motor Using Columnar Actuator
Chen Peihong Wang Yin Huang Weiqing
Nanjing University of Aeronautics and Astronautics,Nanjing,210016
In order to develop piezoelectric linear m otor w ith high resolution,wide frequency response and long stroke,a cy linder type piezoelectric linear motor using piezoelectric stacks which were preloaded by disc sp rings was p roposed.The operating p rinciples o f the m otor were presented,them otor structurewas designed,a prototype w asmade and the experimental study was proceeded.The experimental results show thatw ithin a certain range of frequency the vibration amp litude of the stator driving foot is 2μm,the m aximum no-load velocity of the motor is 3.7mm/s,and the maxim um thrust force of themotor is 4.3N.
piezoelectric linear motor;piezoelectric stack;disc sp ring;non-resonant vibration;experimental study
TM 356
1004—132X(2011)12—1484—05
2010—08—17
国家自然科学基金资助重点项目(50735002)
(编辑 何成根)
陈培洪,男,1985年生。南京航空航天大学精密驱动研究所硕士研究生。研究方向为新型非共振式压电直线电机。王 寅,男,1986年生。南京航空航天大学精密驱动研究所博士研究生。黄卫清,男,1965年生。南京航空航天大学精密驱动研究所教授、博士研究生导师。
