基于横向位移控制4WS车辆操纵稳定性仿真研究
2011-01-29黄俊杰邝坤阳
尤 永 黄俊杰 王 浩 邝坤阳
1.安徽江淮汽车股份有限公司,合肥,230601 2.合肥工业大学,合肥,230009
基于横向位移控制4WS车辆操纵稳定性仿真研究
尤 永1黄俊杰2王 浩2邝坤阳2
1.安徽江淮汽车股份有限公司,合肥,230601 2.合肥工业大学,合肥,230009
建立了一种基于横向位移偏差控制的4WS汽车闭环控制系统,控制目标是减小横向位移偏差,提高轨迹跟踪性能和操纵稳定性。系统中的驾驶员模型是一个基于横向位移偏差控制,包括预瞄、积分和高频补偿的多路闭环控制系统。后轮转角采用前馈和反馈控制结合的方法。对两种汽车运行轨迹进行了仿真研究,结果表明4WS汽车比2WS汽车有更好的横向位移跟踪性能和操纵稳定性。
4WS汽车;驾驶员模型;横向位移偏差控制;操纵稳定性;闭环控制
0 引言
四轮转向系统(4WS)是主动底盘技术的重要组成部分,其原理是前后轮同时参与汽车转向运动,以改善汽车横摆和横向运动,更好地控制汽车运动姿态和运动轨迹,提高汽车的操纵稳定性。四轮转向控制是汽车控制领域内的一个热点,国内外相关研究已取得了一定的成果。文献[1]建立了四轮转向非线性方程和模型,但是模型过于简化,参数难以获取;文献[2]提出了一种基于模型跟踪控制系统,但系统未考虑驾驶员的作用;文献[3]介绍了关于最优预瞄驾驶员模型,但没有提供相应的仿真结果。本文参考文献[4]中的驾驶员模型,建立了一种基于横向位移偏差控制的4WS汽车闭环控制系统,目标是减小横向位移跟踪误差,提高汽车轨迹跟踪性能,改善汽车操纵稳定性。
1 汽车动力学和运动学模型
建立模型的条件如下:x轴于汽车纵向对称平面内,指向汽车前进方向;y轴指向汽车的左侧;z轴指向汽车上方。汽车由簧上质量和簧下质量两部分质量系统组成,忽略空气阻力、滚动阻力及轮胎侧倾效应,车辆对称部分具有相同的特性。动力学和运动学模型示意图见图1。根据上述条件和图1建立模型如下:

图1 车辆模型示意图
纵向运动方程:横向运动方程:
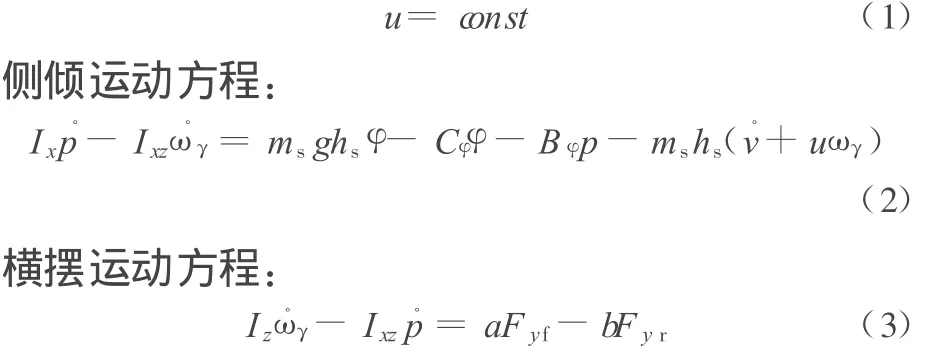

式中,m为整车整备质量;ms为簧上质量;hs为质心到簧载质量侧倾中心的高度;h为侧倾力臂;φ为侧倾角;p为侧倾角速度;ωγ为横摆角速度;Cφ为悬架侧倾角刚度;Bφ为悬架侧倾角阻尼;v为横向速度;a、b为前轴、后轴到质心的距离;k1、k2为前轮、后轮侧偏刚度;δf、δr为前轮、后轮转角;Fyf、Fyr为前轴、后轴车轮侧向力;Ef、Er为前轮、后轮侧倾转向系数;Iz为绕z轴惯性矩;Ix为绕x轴惯性矩;Ixz为xz面惯性矩;g为重力加速度。
2 驾驶员模型[4]

图2 驾驶员模型
驾驶员模型示意图见图2,此模型是一个基于横向位移偏差控制的模型,包括预瞄、积分和高频补偿的多路闭环控制系统。其中,τp为驾驶员预瞄时间;K y为侧向位移跟踪偏差增益;K fi为航向角偏差增益;Ki为积分增益;Tl为微分增益(Ky、K f i取决于车辆特性和驾驶状态);τp、K i、T l是取决于驾驶员驾驶能力的参数;延迟时间τ包括驾驶员反映时间和操纵动作执行延误时间;D(s)为高频动态干扰;s为拉普拉斯变换变量。仿真中采用的驾驶员模型参数(典型的统计值)如表1所列。

表1 驾驶员参数
3 控制系统
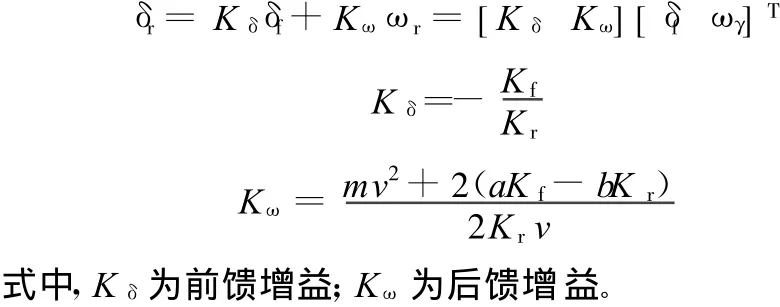
后轮转角采用前馈控制和反馈控制结合的方法,控制目标是使稳态和瞬态质心侧偏角为零。控制系统方程为
4WS汽车控制系统如图3所示。
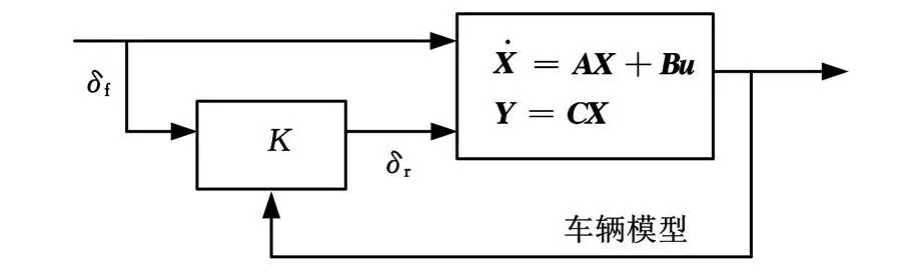
图3 汽车控制系统
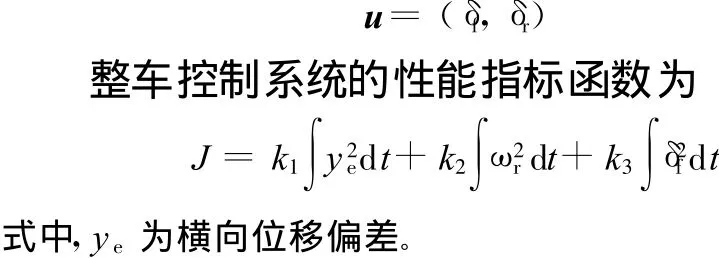
4WS汽车整车控制向量为
4 道路轨迹模型
本文对图4所示的两种道路模型进行了仿真研究。图4a中,汽车目标运动轨迹是半径为R的圆;图4b中,汽车在直线行驶的同时,在一定的时间(一定的纵向位移)内的横向位移为 y的侧移运动。
5 计算机仿真模型及仿真分析
5.1 计算仿真模型
本文基于MATLAB/Sim link软件建立2WS和4WS汽车操纵稳定性模型。对上述两种典型道路进行仿真,比较性地研究4WS汽车对轨迹跟踪和操纵稳定性的改善。4WS汽车计算机仿真模型如图5所示。仿真所用汽车主要参数为:g=9.81m/s2;a=1.163m;b=1.402m;h s=0.49m;m=1484.8kg;m s=1200kg;k1=-39036N/rad;k2=-42309N/rad;Iz=1333.6 kg◦m2;Ix=500 kg◦m2;Ixz=100 kg◦m2;E f=0.17;E r=0.15;Cφ=30900N/rad;Bφ=2100N ◦s/m;u=25m/s。
5.2 仿真结果分析[5-7]
5.2.1 圆形轨迹跟踪仿真分析(R=50m)
如图6a所示,圆形轨道上2WS汽车轨迹脱离预定轨道,形成一个椭圆形;而4WS汽车能较好地跟踪预定轨迹,其运动轨迹和预定轨道较为一致;图6b清楚表明4WS汽车侧向位移偏差比2WS汽车显著下降;图6c中,4WS汽车瞬态横摆角速度比2WS明显减小,并且以较快的速度达到稳态;图6d中,4WS车辆侧倾角速度瞬态峰值和2WS相差不大,但以较快的速度收敛。

图5 4WS汽车计算机仿真模型

图6 圆形轨迹跟踪仿真
5.2.2 侧移运动跟踪仿真分析(y max=5m)
图7a、图7b所示是汽车行驶轨迹和横向位移偏差,侧移运动仿真表明,2WS汽车和4WS汽车都能较好地跟踪横向位移,但是,瞬态时4WS车辆横向位移偏差显著减小,轨迹跟踪能力明显提高;图7c中,4WS汽车瞬态的横摆角速度峰值比2WS汽车瞬态的横摆角速度峰值减小不明显,但4WS汽车以更快的速度达到稳态,操纵稳定性提高;图7d中,4WS车辆的侧倾角速度瞬态性能有所变差,这是因为4WS汽车为了在横向位移急剧变化的状态下迅速跟踪横向位移,前后车轮以较大转向角进行转向,故而造成瞬态车身侧倾角速度出现急剧变化的现象[8-10]。
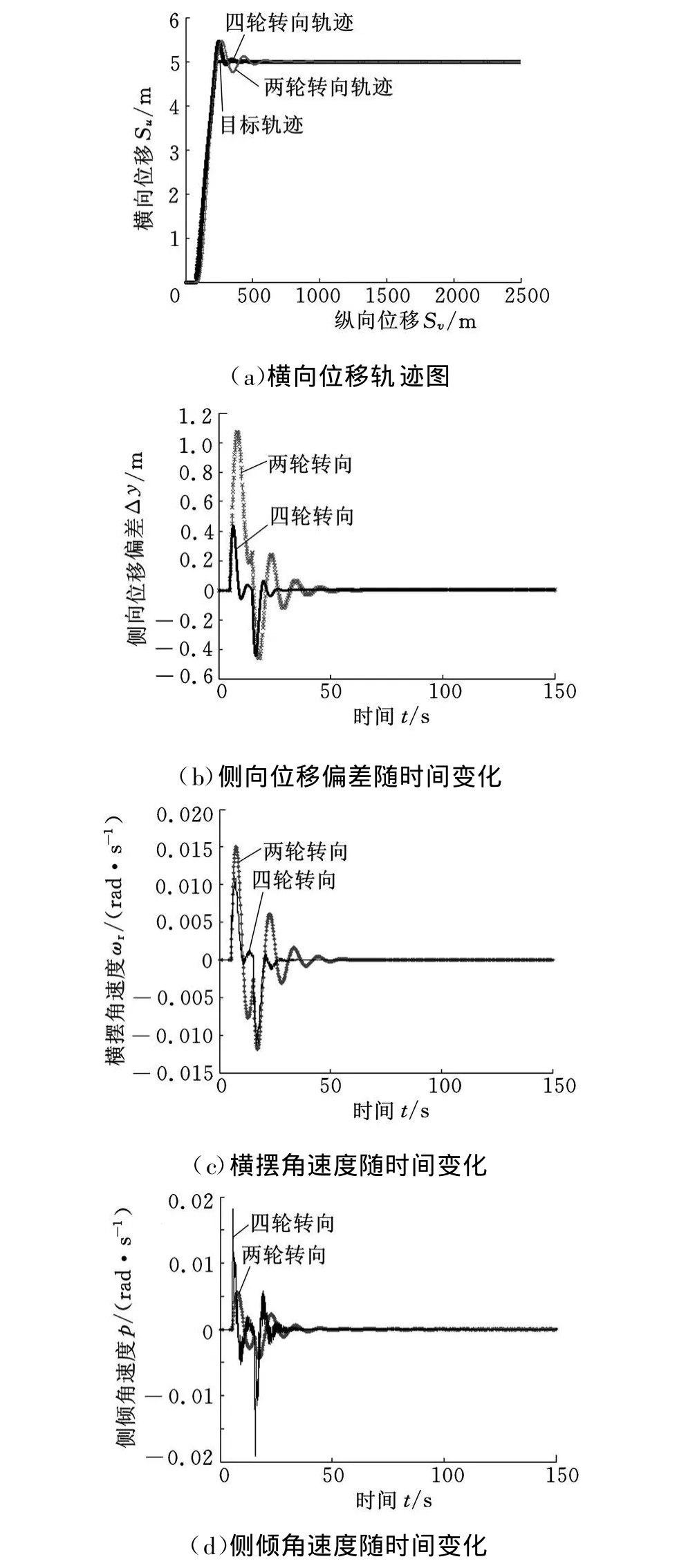
图7 侧向运动跟踪仿真
6 结论
(1)本文建立了人-车-路闭环控制4WS汽车模型,并对两种道路线型进行了仿真分析。仿真结果表明,4WS汽车比2WS汽车能更好地跟踪横向位移,并在一定程度上改善了高速行驶车辆操纵稳定性的瞬态性能。
(2)4WS汽车在提高横向位移跟踪性能的同时,可能使其他性能(如簧上质量侧倾)变差,因此,可以采用4WS车辆控制技术与主动悬架控制技术结合的集成控制,在改善横向位移跟踪和操纵稳定性的同时,其他性能指标也能得到提高,这是车辆主动控制技术发展方向。
[1] 姚永建,韩强.四轮转向汽车的非线性模型及其动力方程[J].华南理工大学学报(自然科学版),2003,31(11):49-52.
[2] 屈求真,刘延柱,张建武.四轮转向汽车自适应模型跟踪控制研究[J].汽车工程,2000,22(2):73-76.
[3] 管西强,屈求真,张建武,等.四轮转向汽车的模型跟踪变结构控制[J].机械工程学报,2002,38(3):54-58.
[4] Wang Bingyon,Abe M,Kano Y.Influence of Driver's Reaction Time and Gain on Driver–Vehicle System Performance with Rear W heel Steering Contro l System s:Parto f a Study on Vehicle Control Suitable for the Aged Driver[J].JSAE Review,2002,23(5):75-82.
[5] 何辉,屈小贞,张立军,等.基于前馈加反馈控制4WS汽车的三自由度模型分析[J].辽宁工业大学学报,2008,20(6):106-108.
[6] 汪东明.四轮转向汽车的转向特性及控制技术[J].现代机械,2003(6):73-75.
[7] 王洪礼,刘晟,迟仲玉.汽车四轮转向运动的稳定性分析[J].机械强度,2000,22(1):23-25.
[8] Horiuchi S,Okada K,Nohtom i S.Imp rovement o f Vehicle H andling by Nonlinear Integrated Control of FourW heel Steering and FourW heel Torque[J].JSAE Review,1999,20(3):459-464.
[9] Nagai M,Shino M,Gao Feng.Study on Integrated Contro l o f A ctive Front Steer Angle and Direct Yaw Moment[J].JSAE Review,2002,23(7):309-315.
[10] Harada M,Harada H.Analysis of Lateral Stability with Integrated Control of Suspension and Steering Systems[J].JSAE Review,1999,20(11):465-470.
Simu lation Research of Steering Stability of 4WSVehicle Based on Latera l Disp lacement Error Control
You Yong1H uang Jun jie2Wang Hao2Kuang Kunyang2
1.A nhui Jianghuai Automotive Co.Ltd.,Hefei,230601 2.H efei University o f Technology,H efei,230009
A closed-loop control system of 4WS based on the controlof lateral disp lacementerror was set up herein,which was used to decrease the lateral disp lacementerror and improve the ability of follow ing track and steering stability.The driver model,in the control system,was a closed multiloop control system,based on lateral disp lacement error control,including preview,integral and com pensation of high frequency.The combination of feedback and feed-forward controlmethod was adopted in the rearwheel steering angle control.Finally,two-type trajectory,followed by vehicle,was investigated by simulation,results show that 4WS vehicle has better ability of following track and steering stability than 2WS vehicle.
4WS(4 wheel steering)vehicle;driver model;lateral disp lacement error control;steering stability;closed-loop control
U461.6
1004—132X(2011)12—1508—04
2010—08—12
(编辑 何成根)
尤 永,1971年生。江淮汽车股份有限公司高级工程师。主要研究方向为车辆动力学。黄俊杰(通讯作者),男,1984年生。合肥工业大学机械与汽车工程学院硕士研究生。王 浩,男,1987年生。合肥工业大学机械与汽车工程学院硕士研究生。邝坤阳,男,1985年生。合肥工业大学机械与汽车工程学院硕士研究生。
