非合作目标追踪与相对状态保持控制技术研究
2010-12-11李克行
苏 晏,李克行,黎 康
(1.北京控制工程研究所,北京 100190;2. 空间智能控制技术重点实验室,北京 100190)
非合作目标追踪与相对状态保持控制技术研究
苏 晏1,2,李克行1,2,黎 康1,2
(1.北京控制工程研究所,北京 100190;2. 空间智能控制技术重点实验室,北京 100190)
基于考虑J2摄动影响的改进Hill方程数学描述,将最优机动问题转化为标准线性规划问题,为在轨服务系统对非合作目标的接近过程进行路径规划,针对卫星跟踪以及悬停的特殊相对运动状态设计控制方法,实现近距离相对轨道的精确控制.最后通过数学仿真验证方案的正确性和有效性.
非合作目标;追踪;悬停;轨道控制
当前,空间技术已经逐渐成为维护国家安全和利益的新军事制高点.空间技术的发展正在从空间利用提升为空间操作(或空间控制).在轨服务系统正是在这种需求下应运而生的.在轨服务航天器逐渐被各大航天大国所接受,开始蓬勃发展.
作为在轨服务的关键技术之一,近距离下对空间目标(特别是非合作的空间目标)的追踪以及相对状态(相对距离和姿态)的保持,是在轨服务航天器实现在轨维护或维修、对目标进行近距离攻击(干扰、网捕等)的前提,因此有必要深入研究超近距离非合作目标追踪与相对保持的轨道控制技术.
当在轨服务系统捕获目标后,需要考虑时间燃耗、避碰、末端状态等约束的情况下设计合理的路径对目标进行接近.关于目标接近路径规划以及控制问题,国内外很多学者做出过研究. 文献[1] 用进化算法探讨了轨道转移的时间-能量优化问题. 文献[2]讨论了有限推力作用下时间和能量综合最优拦截轨道的近似解析解问题.
在轨服务系统任务中,有时需要在轨服务系统在较长的一段时间内保持在目标星轨道附近,这样在轨服务航天器仿佛“悬停”在目标星的某个方位.也有很多国内外有关悬停技术方面的研究.如任务卫星在圆轨道卫星正下方进行悬停的动力学与控制方法研究[3],相对圆轨道目标卫星进行任意位置悬停的方法研究等[4].以上研究工作主要是针对无摄动的圆轨道卫星的悬停进行讨论的.
本文在考虑摄动影响下引入动力学模型,重点研究目标接近的路径规划与控制问题. 针对悬停状态下超近距离控制保持的问题设计相对轨道控制算法实现了近距离悬停的相对轨道精确控制.
1 相对轨道动力学数学描述
假设目标星运行于圆轨道,选择参考轨道坐标系的原点o位于目标星上;x轴沿在轨服务器与地心连线背向地心方向;z轴与瞬时轨道的法线平行;y轴与x、z轴构成右手坐标系,如图1所示.
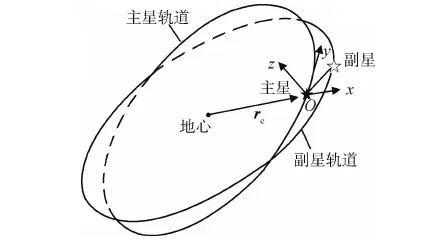
图1 参考轨道坐标系
对悬停轨道进行控制器设计过程中,精确模型和Hill模型都不适用.虽然精确模型的建立过程不会丢失信息,但其非线性的表达形式给动力学分析和控制律设计带来很大不便.对模型进行引力项线性化可以得到模型的解析解,线性化的Hill方程应用非常广泛.但悬停控制往往需要在较长的时间内保持,在各种摄动项的作用下,星间相对位置难以长期保持.
考虑到J2项摄动为星间相对运动中的主要摄动项,对悬停控制器进行设计过程中采用考虑J2摄动的改进Hill方程作为控制对象模型是比较合适的.
考虑J2摄动的改进Hill方程数学描述如下[5]:

dz=2lqcos(qt+φ),
q=

Φ(t)=arccos(cosirefcosisat-sinisatsinirefcosΔΩ(t)),

dc=2Ancarefcosαcsinθref,

2 接近路径规划
采用零阶保持器将模型离散化,得到如下离散动力学模型:

上述离散模型仍是θ域中等间隔采样,对应于时域中的采样周期则是非均匀的.于是,最优控制问题可以描述为:给定的初始x0和末端目标状态x*,求脉冲序列uk和机动时间T使得
其中C为加权阵,并且满足如下约束条件:
其中ε为末端状态误差盒矢量,Lb和Ub分别为推力器大小的上下限.
将上述最优控制问题转化为标准的线性规划问题.由式(5)可得
x1=A0x0+B0(u0+d0),
x2=A1x1+B1(u1+d1)=A1A0x0+A1B0(u0+d0)+B1(u1+d1),
⋮

令
Ap=[AN-1AN-2…A0],
Bp=[[AN-1AN-2…A1]B0[AN-1AN-2…A2]B1…BN-1],
up=[u0u1…uN-1]T,
dp=[d0d1…dN-1]T,
则有
而期望末端时刻

令
将式(7)代入式(8),则可写作
因此,对于固定机动时间跨度,最优机动控制问题可以描述为一个标准线性规划问题:给定的初始和末端状态,求满足式(4)的脉冲序列uk的幅值,并且满足如下约束条件:
这样一个标准的线性规划问题,其求解算法很多.
上述问题求解中,每一个采样点的输入uk都是优化变量,计算量过大,如果采用加大采样周期的方法缩减优化变量,将会降低离散模型的精度.实际上,过多的喷气还会造成推力器劣化的问题.因此,工程实际上往往采用有限数量的脉冲,即在初始时刻和末端时刻,分别作用一个脉冲,而其余的脉冲在机动过程中施加.
3 悬停控制算法
根据任务规划,在轨服务航天器有可能需要在目标星附近悬停,并且方位可能是任意的.研究在轨服务航天器的轨道悬停技术为空间操作(在轨维修、空间攻防等)任务提供了新的技术手段.悬停轨道是一种卫星的相对运动特例,下面对悬停状态下的相对轨道控制做出分析.
令
相对轨道动力学方程矩阵形式如下:
考虑制导过程三轴控制力定常的情况,分别设定三轴滑动面:
其中,kx1、kx2、ky1、ky2、kz1、kz2均为大于零的控制参数,显然三轴滑动面稳定.
另外给定三轴控制律,
其中,ax、ay和az为航天器三轴方向能提供的控制加速度,均为定值.


由此,可得到达运动稳定的条件为


同理可得控制律使到达运动稳定的充分条件如下:
由于各种误差的存在,系统会在滑动面附近发生颤振,控制力输出也会正负高频切换,因此通常设定推力器的开关机阀值来避免颤振.具体地,仍然以x轴方向为例,设定推力器开机阀值Δx1和关机阀值Δx2(Δx1>Δx2>0),设计如下控制律:
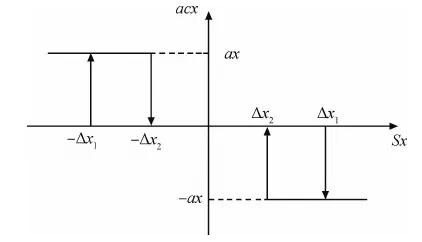
图2 推力器开关机阀值
相应的,也可以设定y轴的开机阀值Δy1和关机阀值Δy2(Δy1>Δy2>0),z轴的开机阀值Δz1和关机阀值Δz2(Δz1>Δz2>0),并给出类似控制律避免颤振.
4 数学仿真
(1)接近路径规划仿真

目标点的相对位置误差盒为[1 1 1]m,相对速度误差盒为[0.1 0.1 0.1]m/s.从工程实际出发,总的脉冲数选为2~4个.仿真结果如图3~图5.

图3 最优机动接近过程
图3给出了相对接近路径仿真图,图4和图5分别给出接近过程中相对位置以及和相对速度的变化情况.仿真结果表明,在轨服务航天器能够对非合作目标很好的实现路径接近.

图4 最优机动下服务航天器相对位置曲线
(2)悬停控制仿真
假设在轨服务航天器相对目标星轨道系初始位置坐标为[x0y0z0]=[-34.9 32.5-242.2]m,期望其悬停点在目标星轨道系中的坐标为[xfyfzf]=[-5 5 0]m;相对相对速度保持不变.由于仿真条件的限制,此处仿真周期选取较小.仿真结果如下图.
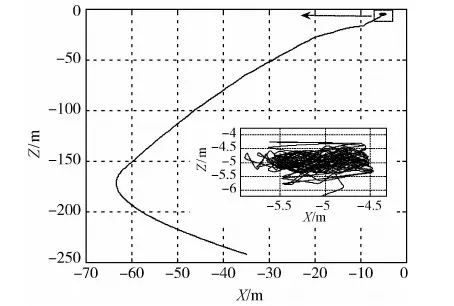
图6 悬停控制下服务航天器斜面内运动
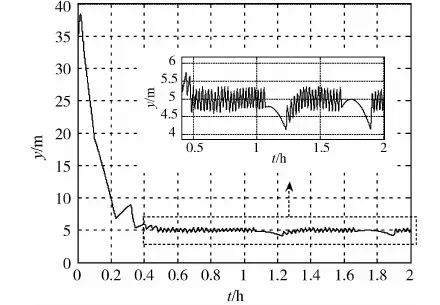
图7 悬停控制下服务航天器轨道斜方向运动
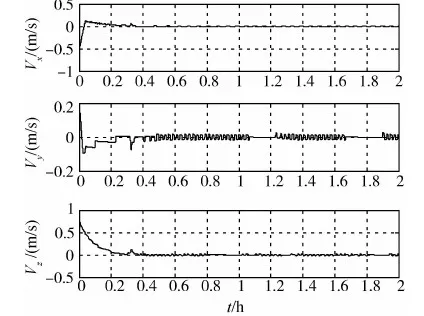
图8 悬停过程中相对速度随时间变化历程
图7和图8给出的仿真结果表明,本文所设计的控制算法可以达到较高的相对位置控制精度.相对位置控制精度优于0.5m,相对速度控制精度优于0.1m/s,整个过程燃料消耗9.2165m/s.
5 结 论
本文将在轨服务系统对非合作目标的最优机动控制问题描述为一个标准线性规划问题,通过线性规划优化方法,对在轨服务系统的接近路径进行优化并能够确定相应的燃耗.对相对运动的一种特例目标悬停进行控制器设计,实现了近距离目标悬停相对轨道的精确控制,为在轨服务系统的工程实现提供了技术支持.
[1] 王石,祝开建,戴金海.用进化算法求解轨道转移的时间-能量优化问题[J].宇航学报,2002,23(1):73-75
[2] 王会利.空间作战拦截轨道设计与优[D].西北工业大学,2007
[3] 林来兴,黎康.卫星对空间目标悬停的轨道动力学与控制方法研究[J].中国空间科学技术,2008,28(1):9-12
[4] 闫野.卫星相对空间目标任意位置悬停的方法研究[J].中国空间科学技术,2009,29(1):1-5
[5] Samuel A,Raymond J. Development and analysis of a high fidelity linearizedJ2model for satellite formation flying[C].AIAA Space 200.-Conference and Expositon, Albuquerque, Aug 2001
[6] Chandeok V G. Solving optimal continuous thrust rendezvous problems with generating function[C]. AAS 03-575 AAS/AIAA Astrodynamics Specialist Meeting, Big Sky, Montana, Aug 2003
[7] Randal W, Fred Y. Fuel optimized rotation for satellite formations in free space[C]. American Control Conference, San Diego, CA, June 1999
[8] Guibout V M, Scheeres D J. Spacecraft formation dynamics and design[C]. AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Providence, Rhode Island, Aug 2004
[9] Albert J. Coplanar two-impulse rendezvous in general elliptic orbit with drag[J].The Journal of Astronautical Sciences, 1997,45(4): 391-409
[10] Nguyen X. Exact analytical solution for three-dimensional interception of a maneuvering target[J]. The Journal of Astronautical Sciences ,1998,46(3):283-305
[11] 林来兴.四十年空间交会对接技术的发展[J]. 航天器工程,2007,16(4):70-77
《空间控制技术与应用》2010年总目次
第1期
论文与报告
冗余飞轮姿控系统控制分配与重构研究
赵 阳,张大伟,田 浩(1)
具有非线性输入的挠性充液航天器自适应模糊控制
王佐伟,郭建新,董海鹰(7)
脉冲星导航的整周模糊度解算方法研究
黄 震,李 明,帅 平(14)
挠性卫星PID受控系统特征频率
李丽琼,苟兴宇(19)
转动惯量未知的非合作目标角速度估计方法研究
刘智勇,何英姿,刘 涛(24)
卫星综合软件的体系结构研究
王 磊,袁 利(31)
动态情况下星敏感器探测灵敏度研究
李 晓,赵 宏,卢 欣(37)
短文
系统噪声对挠性卫星姿态控制稳定性能的影响
谈树萍,雷拥军,汤 亮(42)
一种空间交会绕飞段的小推力滑移制导方法
刘鲁华,郑 伟,汤国建(46)
基于VxWorks的小天体撞击任务的星载GNC软件设计
高 艾,崔平远,崔祜涛(51)
基于混合编程技术的AOCC应用软件快速仿真平台
张 银,索旭华,郭明姝(56)
基于准滑模控制的空间拦截末制导律设计
王国梁,郑建华(59)
第2期
论文与报告
深空光学敏感器“拖尾图像”的处理方法研究
毛晓艳,王大轶,辛优美,等(1)
仅有相对视线角测量时的椭圆轨道交会相对导航分析
刘 涛, 解永春(6)
太阳帆板驱动装置建模及其驱动控制研究
斯祝华,刘一武,黎 康(13)
自旋卫星测试转台精度分析
陶景桥,孙小松,李 明(20)
一类带液体晃动航天器的姿态控制
杜 辉,张洪华(25)
基于单目视觉的空间非合作目标相对运动参数估计
张劲锋,蔡 伟,孙承启(31)
航天计算机网络安全防护技术综述
汤 生(36)
短文
一种基于2DOFH∞控制器的航天器姿态控制方法
梁红义,张锦江(42)
一种用于分析MCS-51目标码堆栈深度的方法
张西超,郭向英(47)
总线容错机制及其验证方法
高 猛(51)
三类自激变换器及其解析结果
孙定浩(55)
大磁矩磁力矩器驱动电路的一种设计方案
范佳堃,王友平,崔赪旻(58)
第3期
论文与报告
面向复杂航天器控制应用的模糊动态特征建模与控制
罗 熊,孙增圻,颜时雨(1)
基于Allan方差法的光纤陀螺建模与仿真
熊 凯,雷拥军,曾海波(7)
带多个充液储箱航天器的耦合动力学建模方法
黄 华,曲广吉(14)
V型轮控系统卫星东西位置保持策略优化方法研究
孙海忠,仇梦跃,赵育善,等(20)
航天器气动力辅助轨道转移轨迹优化问题研究
张万里,王常虹,夏红伟,等(26)
自适应两级UKF算法及其在时变偏差估计中的应用
程会艳,郝云彩,熊 凯(33)
短文
基于FPGA的空间电子部件在轨可修改技术
范松涛 ,徐 阳(38)
星敏感器导航星表建立
田 宏,林 玲,郝永杰,等(43)
软件回归测试用例选取方法研究
王小丽,段永颢(47)
一种双目立体视觉相机标定方法
李春艳,王 立,卢 欣,等(51)
一种板式推进剂管理装置(PMD)性能的数值仿真
胡 齐,李 永,耿永兵,等(55)
基于32位SPARC处理器的JTAG仿真器设计与实现
张晓静,华更新,刘超伟,等(59)
第4期
论文与报告
飞向晕轨道的探测器轨道优化
胡少春,孙承启,刘一武(1)
行星探测器GNC系统自主安全模式设计
杨 巍,黄江川,王晓磊(6)
基于特征模型的再入飞行器制导律设计
张 钊, 胡 军, 王 勇(12)
包含密集模态的空间结构的模糊主动振动控制
刘潇翔,胡 军(18)
基于并联贮箱结构的卫星推进剂剩余量测量方法
魏延明,宋 涛,梁军强(25)
一类卫星推力器布局的多目标优化设计方法
林 波,武云丽(31)
复杂推力器配置控制能力的性能指标及其应用
王 敏,解永春(36)
短文
接口电路中的抗干扰技术
李秀莲,孙定浩(42)
一种高稳定度太阳帆板驱动机构控制方法
张 猛,祝晓丽,陆娇娣,等(46)
“人在回路”的载人航天器控制系统地面验证平台设计
任 焜,李 彬,李志宇(50)
卫星编队飞行相对轨道动力学模型的比较及选用
苏 晏,黎 康(54)
基于神经网络动态逆的动力伞飞行控制方案
钱克昌,陈自力,李 建(59)
第5期
论文与报告
多冲量近圆轨道交会的快速打靶法
王 翔,龚胜平,宝音贺西,等(1)
一类非线性网络化系统的鲁棒故障检测
何 潇,王子栋,吉吟东,等(7)
航天器可测试性设计研究
李 彬,张 强,任 焜,等(13)
航天器编队飞行多目标姿态跟踪终端滑模控制
袁长清,李俊峰,张威泰,等(18)
基于特征模型的高阶线性不稳定系统的参数辨识与控制
王丽娇(25)
跟踪与数据中继卫星星间链路天线驱动机构技术综述
崔赪旻, 王典军(32)
短文
消除转接支架影响的飞轮振动数据处理方法
王全武,武登云(38)
基于RBF神经网络的自适应PID星钟热控制
许 斌,刘志友,孙富春,等(42)
基于参考轨道的Walker星座相对相位保持策略
胡松杰,申敬松,郇 佩(45)
Halo轨道间转移的显式制导方法研究
连一君,孟云鹤,汤国建(50)
基于反熔丝FPGA的有限状态机加固设计
刘 群,冯 丹,周新发(54)
三轴转台误差对加速度计误差模型系数标定精度的影响
程 源,陈希军,任顺清,等(58)
第6期
论文与报告
空间站组合体惯性系内角动量管理控制
张 军,马艳红, 何英姿(1)
慢旋非合作目标接近轨迹规划
刘智勇,何英姿(6)
帆板驱动时的卫星姿态前馈补偿控制
斯祝华,刘一武(11)
未知参数高阶线性系统基于特征模型的卡尔曼滤波
龚宇莲,吴宏鑫(16)
航天器姿态指向跟踪的一种自适应滑模控制方法
王冬霞, 石 恒, 贾英宏,等(22)
基于自适应观测器的飞轮故障诊断物理仿真
田科丰,李明航(27)
空间机器人气浮式物理仿真系统有效性研究
郑永洁,张笃周,谌 颖(33)
短文
一类平流层飞艇质量和惯量特性的计算方法与分析
吴 雷,李 勇,李智斌(39)
精密谐波齿轮径向刚度测试与分析
曾海波,吕 勇,黄铁球,等(43)
超声波流量计在航天器推进系统中的应用分析
丁凤林, 魏延明(47)
非合作目标追踪与相对状态保持控制技术研究
苏 晏,李克行,黎 康(51)
ControlTechnologyforRelativeStatesTrackingandHoldingtoUncooperativeSpacecraft
SU Yan1,2, LI Kehang1,2, LI Kang1,2
(1.BeijingInstituteofControlEngineering,Beijing100190,China;2.ScienceandTechnologyonSpaceIntelligentControlLaboratory,Beijing100190,China)
Based on the improved Hill equation in consideration of theJ2disturbance, the optimal maneuvering problem is converted into a standard linear programming problem a path is programmed for on-orbit servicing system approaching to an uncooperative object. Based on the special relative motion of tracking and hovering, a control method is designed to achieve relative orbit control accurately. Finally, validity and effectiveness are verified by mathematic simulation.
uncooperative object;tracking;hovering;orbit control
2010-07-28
苏晏(1987—),女,河北人,硕士研究生,研究方向为控制理论与控制工程 (e-mail: yamsu11@hotmail.com).
V4
A
1674-1579(2010)06-0051-05
