冗余飞轮姿控系统控制分配与重构研究*
2010-11-07张大伟
赵 阳,张大伟,田 浩
(1.哈尔滨工业大学航天工程系, 哈尔滨 150001;2.北京空间飞行器总体设计部, 北京 100094)
早期航天器姿态控制系统执行环节仅具有较小的冗余,因而较少研究冗余管理方法.在建设大型空间结构的目标下,航天器需要实现组合控制;在刚性组合条件下,控制执行机构增加而控制维数不变,使得控制系统具有更多冗余.控制系统变得复杂的同时也对可靠性提出了更高要求,因此控制实现趋向于综合利用这些冗余,提高系统综合性能.
开车时间长了,就难免会遇到各种突发事件和紧急情况,如高速爆胎、方向盘失控、刹车失灵等等。一旦出现这些状况,很多车主都会慌乱,一时不知道该如何处理,今日,小编就来教你几招遇突发状况时的避险技巧。
对于具有多冗余执行机构的控制系统,充分利用系统资源、提高可靠性的有效方法是使用控制分配与控制重构技术.配合系统辨识的间接自适应控制系统及分配环节如图1所示,其中控制率设计和控制分配器设计交互完成.包含控制分配环节的控制系统在设计时具有以下优势:1) 便于使用先进的控制方法;2) 通过使用系统冗余,提高可靠性;3) 结合故障诊断与隔离系统,快速实现系统重构;4) 充分利用系统资源,有效提高系统性能,通过选择分配目标函数,实现燃料最省、机动时间最短、姿态调整精度最高等多种优化目标.控制分配问题,涉及两个层面问题:一是分配方法的设计;二是求解算法的选取.
已有控制分配研究主要针对线性系统,使用的分配方法包括群组法[1]、伪逆法[2]、串接链方法[3]、直接分配法[4-5]和数学规划(线性及非线性[6])方法等.其中数学规划方法属于优化方法.
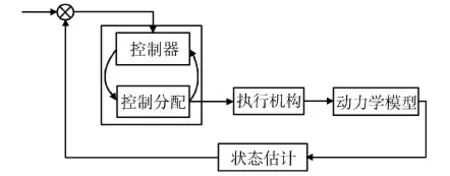
图1 包含分配环节的控制系统
基于数学规划方法的控制分配算法,优点是易于处理约束条件,缺点是运算量大.数学规划方法的本质是从满足非线性映射的可达集中求取满足约束条件的控制分量并实现优化目标,根据目标函数的不同,该方法主要处理3类问题,包括:
2) 若CB列满秩,系统控制不足;
2)QP:目标二次,约束线性;
式中u为每个执行机构控制分量,对于冗余系统,方程数目少于未知数数目,在有解的条件下,结果不唯一.
y=Cx
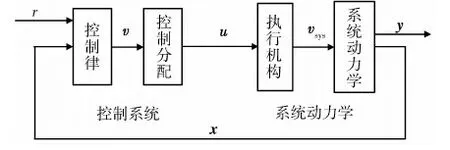
图2 控制分配环节
本文给出了基于控制分配和控制重构的执行环节大冗余管理办法,并给出了最小控制量目标下的分配求解算法.首先建立了分配问题数学模型,然后对各种求解算法进行了比较,接着考虑了基于动量交换设备的姿态控制回路中执行环节故障时系统的重构方法,最后对全文进行了总结.
1 控制分配问题描述
动力学系统可以描述为

理想控制分配过程中经过分配环节后的系统输出与给定伪指令输入完全一致,反映在图2的控制回路中,即通过优化算法求取系统控制输入u,使得vsys=v.分配过程通常考虑两个约束条件:一是执行机构的速度和幅值约束条件;二是时间约束条件,分配环节作为控制回路一部分,分配解算时间必须小于控制周期.
患病羊在发病过程中会表现出较为严重的腹泻症状,这时可利用磺胺类药物或者抗菌素对其实施具体治疗。具体而言,就成年羊来讲,可利用百分之十的黄安嘧啶注射液20到30毫升左右对其实施肌肉注射操作;就羔羊而言,也可以利用此类药物10到15毫升进行注射,并应以天为单位,2次/d。倘若患病羊表现出腹痛症状,则可利用百分之十的安乃近4到6毫升,对其实施肌肉注射操作,同时,利用鞣酸蛋白2到5克对其实施灌服操作。
(1)
系统的冗余条件可以通过CB体现:
2.5.5 稳定性试验 取“2.2.3”项下供试品溶液(编号:G-5)适量,分别于室温下放置0、2、4、6、8、10、12 h时按“2.1”项下色谱条件进样测定,记录峰面积。结果,淫羊藿属苷A、朝藿定A1、朝藿定A、朝藿定B、朝藿定C、淫羊藿苷、鼠李糖基淫羊藿次苷Ⅱ、宝藿苷Ⅰ峰面积的RSD分别为1.31%、1.25%、0.15%、0.12%、0.08%、0.09%、0.31%、1.31%(n=7),表明供试品溶液于室温下放置12 h内基本稳定。

1)LP:目标线性,约束线性;
在当前时代的发展背景下,人们的生活水平不断提高,土木工程建设行业也取得了有目共睹的成就,在此情况下,人们对土木工程施工质量有了更高的要求。因此,为了进一步提升土木工程的施工质量,施工单位应加强土木工程施工管理,从各施工环节入手,如施工流程、管理制度、施工人员安全等方面进行有效进行管理。但在实际的施工管理中,施工内容较多,施工管理难度较大,需要从业人员从多因素,多角度出发,提高管理水平。
3) 若CB行满秩,系统控制有冗余.
设v为系统目标控制量,且有
在已知控制目标力矩的条件下,姿态控制回路分配问题为根据飞轮的控制效力矩阵求解每个飞轮的独立控制分量.
CBu=v
(2)
3)NP:目标和约束同时存在非线性.
1) 若CB非奇异,模型的输入输出关系唯一;
umin(t)≤u(t)≤umax(t)
(3)
尽管系统有冗余,但仍然未必有同时满足式(2)和式(3) 的u存在.至此,控制分配基本问题可以描述为:在CB和偏好控制量ur已知的条件下,求取u满足控制目标
(4)
式中:ε为标量形式权重系数,用来控制跟踪误差;Wu、Wv为非奇异的权重系数矩阵.式(4)中若p=1,则为一维混合目标分配;若p=2,则为二维混合目标分配;若参考控制输入为0,则相当于控制量最小.

T=Abwτ
(5)
长三角一直是我国重大改革创新先行先试的地区。近年来,国家多项重大改革举措密集在长三角地区率先部署(见图1)。2010年,江苏省沿海开发上升为国家战略。2011年,国务院同意上海张江建设第三个国家自主创新示范区,并将合芜蚌自主创新综合试验区建设上升到国家层面[4]。2013年,上海自贸区成立,从五大方面开展改革试点;同年,国务院批准在江苏苏南建设“苏南现代化建设示范区”。江苏省和安徽省成为全国仅有的两个创新型省份建设试点省。2014年,苏南国家自主创新示范区获国务院批复。“十二五”期间,国家战略在长三角的密集部署,就是希望长三角能够为新一轮创新驱动发展探路,为全国发展提供示范。
2 二次最优控制分配求解算法
二次最优控制分配本质上是约束条件下的二次规划问题,当前已有的二次最优控制分配求解算法包括SLS (sequential least-squares)[7]、 WLS(weighted least squares)、 IP(interior point solver)[6]、FPM (fixed point method)[8]和CGI (cascading generalized inverses)[9]等,其中WLS和SLS算法求解效果基本一致.Härkegård针对SLS算法提出了有效集方法,该方法可对式(6)~(7)进行逐级求解[7]
(6)
(7)
Burken等提出FPM算法,该算法主要步骤为递归计算
式中:M=(1-ε)(CB)T(CB)+εI;sat(·)为饱和函数,可将u的每个分量都限制在饱和范围内.每种算法的具体实现过程可以参考文献[6-9].本文综合飞轮机构的特性,使用已有算法进行了姿态控制回路控制分配仿真分析,对求解算法进行了比较.
3 执行机构控制重构与容错
早期容错控制基本是基于硬件冗余技术,通过将功能相同的多个部件并联使用,完成任务.这种设计方式会增加系统成本,某些情况下技术使用受限.随着解析冗余概念的提出和发展,控制系统逐步实现了利用不同部件间的联系和功能上的冗余性在个别部件失效时维持系统的控制能力.解析冗余容错技术包括鲁棒容错控制和重构容错控制.鲁棒容错属于被动容错.利用系统中的冗余,鲁棒容错使控制器对传感器、执行机构或其他部件失效不敏感,但由于系统故障的多样性,鲁棒容错控制使用范围较窄.主动容错控制采用在线故障诊断与隔离机构,根据系统故障信息,实时更新控制器,以对故障进行补偿,保持系统性能.控制重构可以在控制系统的不同环节上实现,如图3所示,控制重构技术能够覆盖从方案到指令执行的所有环节,而在执行环节的控制重构本质上是控制重分配.
汪洪表示,肥料使用管理有“四个目标”,即农学效益-作物产量和品质;经济学效益-经济利润;生态环境效益-农业生产持续;社会效益-人体健康与农产品安全。因此,安全、高效、经济是现行的《肥料登记管理办法》的关键词,登记管理目的是保护生态环境、保障人畜安全、促进农业生产。同时,汪洪建议,应对肥料登记中的备案信息进行有效合理的利用,保障肥料使用者的知情权,推动构建起肥料产品的质量追溯及信用管理体系。
策略五:引导家长学习一些与幼儿拉近关系的技巧,如身体接触、语言鼓励、送礼物等,融洽教学氛围,增强助教效果。

图3 控制重构环节
控制重构技术配合系统辨识、故障诊断与隔离功能完成.此处间接控制重构方法还要以系统可达集再计算为基础.对于大冗余控制系统,综合数据融合、控制分配、故障诊断与隔离及控制重构技术的控制系统结构如图4所示.当判断所有执行机构正常工作时,采用正常分配模式;当判断执行机构故障后,则修改控制效力矩阵,使与故障执行机构对应的控制效力矩阵元素为0,更新B后实现控制重分配.当在轨组合新的航天器时,也需要采用重构技术,实现对新增执行机构的融合.与执行环节故障下的控制重构近似,系统的增加也通过修改控制效力矩阵,实现新增冗余的管理.
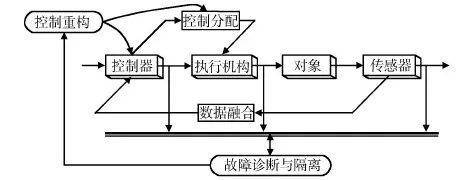
图4 控制系统结构
4 仿真与分析

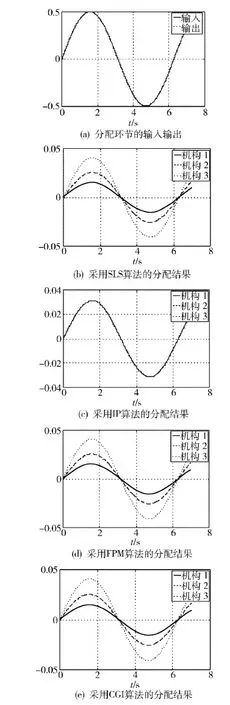
图5 分配环节的输入输出
在执行机构未饱和的条件下,各种分配求解方法都能够充分利用全部执行机构,经过有限次迭代实现精确控制分配,且使控制消耗最小,体现了控制分配环节的有效性.
4.1 幅值饱和条件下的仿真
对以上系统,当输入信号幅值增加时,各执行机构将陆续饱和,当幅值为2.4时仿真结果如图6~7所示,其中采用SLS、IP、FPM算法的输出仍能精确跟踪输入(图略),但采用CGI算法会出现较大的跟踪误差,如图6所示.各种算法仍在有限次迭代内收敛,保证计算实时性,但不保证收敛于最优解.在系统输入信号回到零点时,尽管分配后的系统输出都是0,但对于IP算法和FPM算法每个独立执行机构分量并不为0,系统产生了无效内耗.
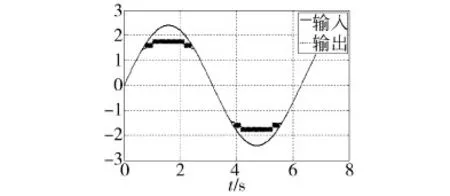
图6 部分机构饱和下的CGI算法输出
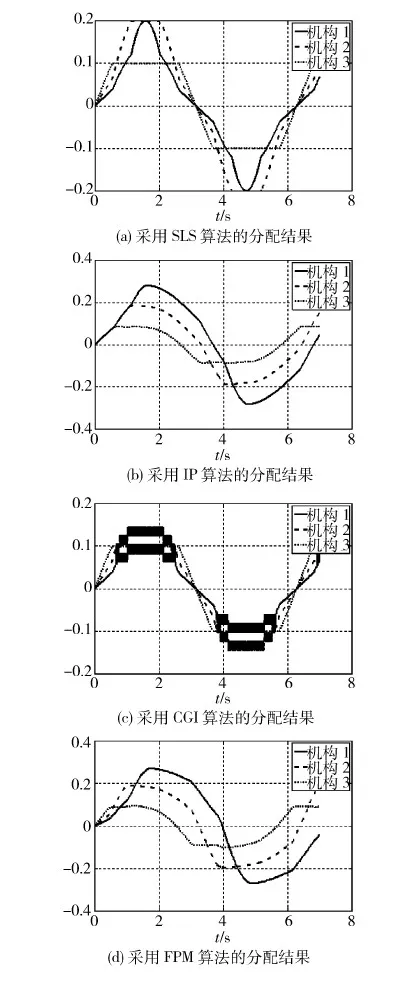
图7 部分机构幅值饱和分配结果
4.2 速度饱和条件下的仿真
同样对单输入单输出系统,设执行机构为4个,控制效力矩阵B=[6 4 5 7],速度约束条件为[-0.1 0.1]、[-0.2 0.2]、[-0.3 0.3]、[-0.40.4],极值约束条件为[-1 1]、[-2 2]、[-1.51.5]、[-2.5 2.5],控制偏好ur=[0 0 0 0]T,权重系数ε=1×10-6.设参考输入信号为方波,其周期为6 s,延时0.5 s,宽度为50%,幅值为1,进行控制分配仿真后结果如图8~11所示.
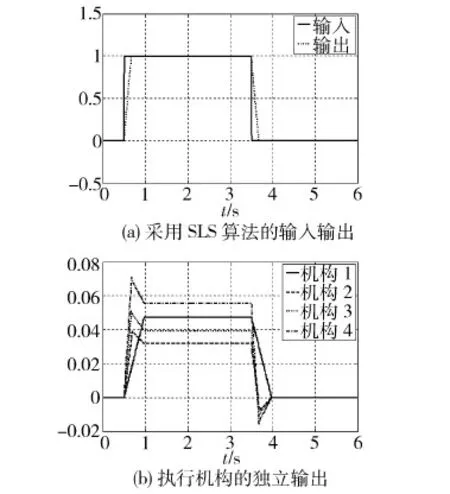
图8 速度饱和下的SLS算法分配结果

图9 速度饱和下的IP算法分配结果
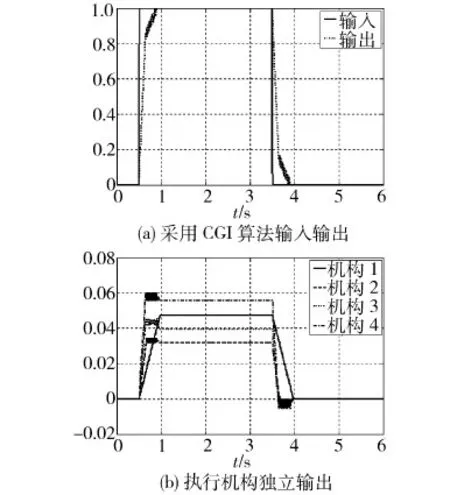
图10 速度饱和下的CGI算法分配结果

图11 速度饱和下的FPM算法分配结果
图6~11中仅给出了单个周期内的信号变化,更多时间范围内输出信号呈周期性变化.比较图中分配结果可知,SLS与FPM算法能够更好地针对速度饱和条件进行分配,而IP和CGI算法都存在明显的跟踪误差.
综合比较速度、幅值饱和及非饱和条件下的控制分配结果,结合更多输入输出条件下的控制分配仿真,可以得出关于控制分配环节的以下结论:
习近平在他的七年知青岁月中,目睹了村民们的贫困生活。那时他暗暗下定决心,有朝一日,若能有所作为,一定要改变百姓们的贫穷状况。
1)使用基于分配的冗余管理能够充分利用系统的全部执行环节,有效协调调度各机构并提高系统的输出幅值和响应速度;
2)在执行环节未达到饱和的条件下,各种分配算法都有很高的求解精度,计算效率能够满足实时分配要求;
3)当部分执行机构达到饱和后,信号的分配精度降低,分配环节的有效性降低;
4)综合比较各种算法,SLS算法在满足速度和幅值约束要求时具有最好的求解精度和分配效率,且对系统变化和参数变化具有鲁棒性.
一是管理目标更加严格。最严格的水资源管理制度,尤其是用水总量控制的目标是到2030年不超过7 000亿m3。这实际上是我们在这一段时间之内可利用的一个最大量。为了实现这个“红线”目标,还提出了2015年和2020年阶段性的控制目标。
三角代换法的基本思想,在于把函数的值域问题转化为三角函数的值域问题,在代换时,必须使三角函数的值域与被代换变量的取值范围相一致〔1〕142。消去根式是数学常用的一种划归方法,在解无理方程、无理不等式时,都要用到这种化“无理”为“有理”的方法。下面用三角函数的平方关系消去根式,得到一个三角式而不是有理式,但它产生了把一个问题得以解决的“有理行为”,这属于更广泛意义的有理化。
4.3 姿态控制力矩的跟踪仿真
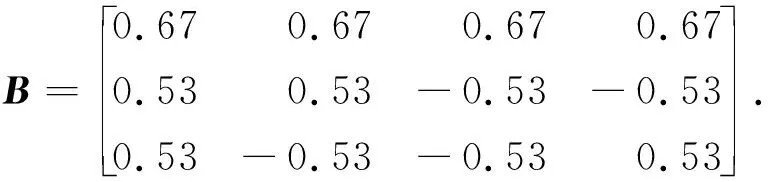
设具有4个斜装飞轮的卫星姿态跟踪控制系统的飞轮的速度约束条件均为[-0.7 0.7]N·m/s,幅值约束条件均为[-1 1]N·m.根据斜装方案,在本体坐标系下,其控制效力矩阵可以表示为
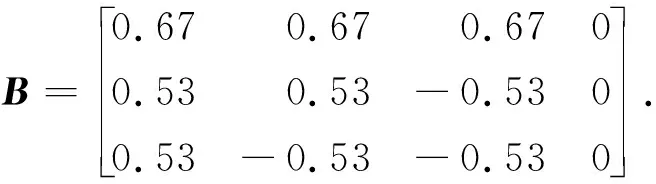
采用滑模变结构控制器,根据预先设定的姿态角误差,其3个通道的目标力矩伪指令如图12(a)所示.图12(b)为经过分配环节后的跟踪输出力矩,图12(c)为每个执行机构上的独立控制力矩.比较图12(a)和图12(b)可知,在经过几个计算步长后,执行机构的输出能够精确跟踪控制输入力矩,分配环节能够满足动态分配要求.
采用4个飞轮斜装的配置方案,可以实现单个飞轮故障下的容错控制,设其中某1个飞轮堵转,经过故障诊断与隔离后,修改控制效力矩阵为
钢丝绳加固可将预应力分散锚固,提高了外加力的可控性。此外,钢丝绳质地相对柔软,可通过张拉较短长度而获得较大的补强力,减少了预应力的损失,可对既有PC桥梁进行有效地加固。Yang等[12-14]使用预应力钢丝绳对钢筋混凝土梁和砌体墙结构进行了加固。吴刚等[15-17]系统地比较了预应力钢丝网与粘贴钢板、粘贴碳纤维片及体外预应力等三种常用加固方式的优缺点,提出采用钢丝绳加固受损桥梁的可行性,研究了该加固法的抗弯加固性能。
动态控制重构将直接根据修改后的控制效力矩阵完成伪指令的分配,分配后的控制力矩输出如图13(a)所示,每个独立执行机构输出如图13(b)所示.
其次,坚持持续培训,循环施行。员工专业技能培训不仅仅是一次活动,更重要的是长期效应。谁都不是天才,员工的专业技能不可能培训一次就突飞猛进,他们需要不断巩固、学习和锻炼,才能逐步提高。而且持续培训还能更好地解决人才储备,顺利完成员工新老接替的过程,使培训公寓的员工管理形成一个良性循环,服务工作更加规范化、专业化。
两种分配方式下,姿态角的跟踪误差如图14所示.
仿真结果表明,在更多执行机构同时作用的条件下,动态分配环节可以实现伪指令在具有冗余的执行机构间的动态分配,控制分配环节耗时能够满足时间约束条件,在执行机构出现故障的条件下,控制的重分配能够通过调整分配方式直接实现控制重构,保证对控制伪指令的跟踪.
5 结 论
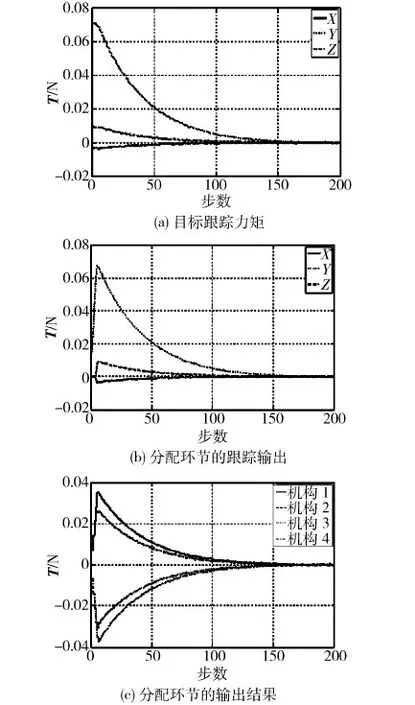
图12 正常工作模式下的分配结果
图13 单个执行机构故障模式下的分配结果
使用控制分配和控制重构技术能有效提高冗余系统资源的利用率和系统可靠性.文中提出了基于动态控制分配的执行机构冗余管理与控制重构方法,建立了最小目标下的控制分配模型,比较了速度及约束条件下不同求解算法的计算精度,经过仿真验证了在执行机构未饱和前,各种求解算法都具有很高的求解精度,在执行机构饱和后,各种算法求解精度都有降低,而SLS算法产生的控制内耗最小,同时跟踪精度最高.通过具有冗余飞轮的卫星姿态角跟踪控制仿真,验证了在故障条件下控制系统重构的有效性.文中提出的动态控制分配方法与执行环节重构具有较强的实践性,能够满足工程应用需要.
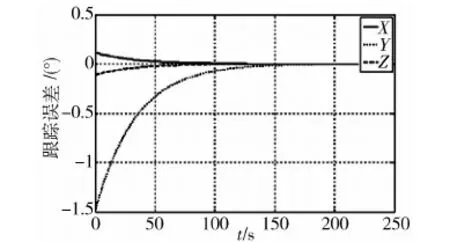
图14 姿态角的跟踪误差
