改进恒Lyapunov指数谱混沌系统的同步方法与特性研究*
2010-09-19李春彪文1江苏经贸职业技术学院工程技术学院南京210007江苏省食品安全工程技术研究开发中心电源与系统部南京210007南京航空航天大学信息科学与技术学院南京210016
李春彪 胡 文1)(江苏经贸职业技术学院工程技术学院,南京 210007)2)(江苏省食品安全工程技术研究开发中心电源与系统部,南京 210007)(南京航空航天大学信息科学与技术学院,南京210016)
Li Chun-Biao1)2)† Hu Wen3)
1)(Department of Engineering Technology,Jiangsu Institute of Econom ic and Trade Technology,Nanjing 210007,China)
2)(Department of Electric Source and System,Research and Development Center of Food Safety Engineering Technology of Jiangsu Province,Nanjing 210007,China)
3)(School of Infor mation Science and Technology,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
改进恒Lyapunov指数谱混沌系统的同步方法与特性研究*
李春彪1)2)†胡 文3)
1)(江苏经贸职业技术学院工程技术学院,南京 210007)
2)(江苏省食品安全工程技术研究开发中心电源与系统部,南京 210007)
3)(南京航空航天大学信息科学与技术学院,南京210016)
(2009年5月6日收到;2009年6月9日收到修改稿)
改进恒Lyapunov指数谱混沌系统的特殊的分段线性结构及其全局线性调幅参数与倒相参数的存在性,赋予了其同步体系新的可实现性与可调节性.依据广义同步的原理,构造合适的驱动系统与响应系统,可以实现恒Lyapunov指数谱混沌系统的广义同步;改变响应系统的参数,可实现完全同步与广义投影同步;改进恒Lyapunov指数谱混沌系统的全局线性调幅参数能对驱动与响应系统的状态变量幅值实施同步升降控制,倒相参数能对某一特定状态变量实施同步倒相控制.这种同步体系无需专门的控制器,结构简单,易于实现.文章最后设计了同步体系的实现电路,实验仿真结果证明了混沌同步方法的可行性,也验证了恒指数谱混沌系统特殊参数对同步体系状态变量幅值与相位的调控作用.
改进恒Lyapunov指数谱混沌系统,同步,幅值控制,倒相控制
PACC:0545
1.引言
混沌信号应用于雷达与通信系统已经成为极为活跃的研究领域[1—4].要将混沌系统应用于雷达与通信等实际工程中,往往需要给出正确可行的电路实现方案与同步方案[5—15].正是基于这一原因,多年来,人们对混沌同步的研究不断深入,提出了许多有效而可行的混沌控制与同步方法[5—12],如驱动-响应同步法[5,6]、线性反馈法[7—11]、非线性反馈法[11]、自适应控制同步法[12,16]、非线性状态观测器方法[17]等.1999年,Mainieri和Rehacek[18]在部分线性混沌系统中观察到一种称为投影同步的新的同步现象,该同步使得在一定条件下耦合的主从系统的状态变量相位锁定,振幅恒比例且可调.此后,投影同步便引起了人们的广泛关注[13,14,19—28].而最近出现的广义投影同步方法及其应用研究[13,14,23—28],将投影同步与广义同步联系了起来,通过比例因子的调节作用实现任意比例于驱动混沌系统输出的混沌信号.实现广义投影同步通常采用单向线性耦合方法[22]、驱动响应方法[23—25]、主动控制方法[13,26,27]和自适应投影同步方法[28]等.
最近,Li等[15]提出一种新的具有恒Lyapunov指数谱的类Colpitts混沌吸引子,通过参数剥离,继而得到一种具有双参数恒Lyapunov指数谱特性的改进系统[29],添加线性项与常数项又推广得到一族恒指数谱混沌系统[30].文献[31]对改进系统的广义投影同步进行了研究,得到了该系统的同结构与异结构广义投影同步控制器,设计了同步体系的实现电路,指出了其广义投影同步体系中存在的内外两个幅值调节因子[31].实际上,恒Lyapunov指数谱混沌系统特殊的分段线性结构及其特殊参数也赋予了系统同步新的可实现性与可调节性.本文以改进恒Lyapunov指数谱系统[29]为研究对象,依据广义同步原理,构建新的同步体系;在此基础上,进一步实现完全同步与广义投影同步;同时揭示恒指数谱混沌系统的同步特性,指出其同步体系中所存在的特殊的幅值与相位可控性.由于混沌电路实验是研究混沌系统动力学特性和验证混沌控制与同步方法有效性的重要手段,同时混沌电路及其同步体系的实现电路也是混沌在电子信息领域应用的一个重要基础与前提,因此,本文在继数值仿真之后,设计了同步体系中驱动与响应系统的实验电路;通过参数的设置与调整,可以实现不同的同步方法;借助于电路仿真PSpice软件平台,验证了同步方法的正确性,也验证了恒指数谱混沌系统之同步体系幅值与相位的特殊可调节性.恒Lyapunov指数谱混沌系统自身的优势与特征转移到相应的同步体系中,增加了其同步体系的幅度与相位控制自由度,提升了恒指数谱混沌系统的工程应用价值.
2.广义同步方法设计
2.1.广义同步的基本原理
设有单向耦合(驱动的混沌动力学参数不依赖于响应系统的参数)的混沌系统,驱动系统和响应系统的行为可以表示为

其中,x∈Rn,y∈Rm,h:Rn→Rm,˙x=f(x)为驱动系统,˙y=g(y,h(x))为响应系统.
定义[32]设存在变换H:Rn→Rm,一个函数流形M以及一个子集B=Bx× By⊂Rn×Rm,且满足M⊂B,当且仅当所有初始条件(x0,y0)⊂B的响应系统轨道都随时间趋于无穷而趋于M,即当t→∞时,响应系统的轨道满足y= H(x),则称(1)式的两个系统广义同步.当n=m时,则广义同步回到一般意义上的完全同步,即y= H(x)=x.
在广义同步的两个子系统中,如果驱动系统能分解为线性部分与非线性部分x˙=Ax+Φ(x),其中A是n×n系数矩阵,Ax是f(x)的线性部分, Φ(x):Rn→Rn是非线性部分.可以让函数Φ(x)作为驱动信号去作用于响应系统.考虑单向传输的两个系统同步,构造相应的驱动与响应系统

这里,上式代表驱动系统,下式代表响应系统.
引理[33]如果Ω是A的对易矩阵,即满足AΩ =ΩA,则当t→∞,且A的特征值实部全部为负数时,响应系统的轨道与驱动系统的轨道将实现广义同步,即y=H(x)=Ωx.
证明[33]令系统误差为Δ=y-Ωx,对误差求导并代入上述系统函数,有

当误差系统(3)中矩阵A的所有特征值实部全为负数时,则Δ→0,误差系统渐近稳定.因此,只要构造出满足上述条件的矩阵A和Ω,则可以使驱动系统和响应系统满足t→∞时,y→Ωx=H(x),从而实现广义同步.
2.2.广义同步方法设计
改进恒Lyapunov指数谱混沌系统的数学模型为[29]

这里,a,b,c,d为实常数,当参数取a=d=3,b= 0.4,c=1.62时,系统状态变量的演变呈现混沌特性.文献[29]指出,d为全局线性调幅参数,d发生变化,系统输出信号x,y,z的幅值也都随着作线性变化;倒相参数a的极性的改变能够对系统输出的z信号实施倒相控制;系统(4)相对于上述两个参数皆呈现恒定的Lyapunov指数谱.下面就基于广义同步思想着手研究该系统的同步方法,在此基础上,再对恒Lyapunov指数谱混沌系统的同步特性进行进一步的分析.
2.2.1.驱动系统的构造
针对改进恒Lyapunov指数谱混沌系统(4),构造驱动系统为
根据Routh-Hurwitz判据,当b>0时,要使得矩阵A的特征值实部全部为负,必须满足以下关系:

此时,以系统(5)作为驱动系统,与响应系统相耦合,响应系统与驱动系统之间就能够实现广义同步.实际上,驱动系统就是原来的改进恒Lyapunov指数谱混沌系统(4),这一点是不变的,改变的只是形式而已.
2.2.2.响应系统的构造
根据引理,系统(5)相应的响应系统具有以下形式:

由(3)式可知,Δ˙=AΔ,在b>0,且0<β<2b时,Δ→0,误差系统渐近稳定.当满足Ω是A的对易矩阵时,构造的响应系统与驱动系统之间能够实现广义同步.
选择不同的A的对易矩阵Ω可以构造多种不同的广义同步系统,当选择0)时,也有ΩA=AΩ成立,由方程(8),得到相应的响应系统为
根据广义同步引理,响应系统(9)的输出状态为

由(10)式可见,在Ω作如上选择时,当响应系统与驱动系统之间实现广义同步,响应系统的状态变量是驱动系统的对应状态变量的λ倍,响应系统不但跟踪了驱动系统的状态变量,选择与调节λ还能够实现对驱动系统的输出信号进行衰减、放大甚至倒相衰减或者倒相放大.也就是说,基于广义同步方法可以进一步实现完全同步与广义投影同步.与广义投影同步中的比例因子相比较,这里的λ反映的是响应系统与驱动系统之间的状态变量的比例关系,而不是驱动系统与响应系统之间的比例关系,故也可称为比例因子,但其实际含义与广义投影同步中的比例因子不同[31],两者存在倒数关系.与之相对应,后面误差信号的定义也相应地改为响应系统输出的状态变量与驱动系统状态变量之差.
3.完全同步与广义投影同步及其同步特性分析
3.1.完全同步:λ=1
取β=0.5,当λ=1时,初始值不同的响应系统与驱动系统(不妨设初始值分别为(0,1,0)与(1,0,1))之间实现了完全同步.设响应系统与驱动系统之间状态变量的误差为e1=x2-x1,e2=y2-y1,e3=z2-z1,同步时的状态变量相图与同步误差曲线如图1所示.

图1 完全同步时的状态变量相图与同步误差曲线 (a)x1-x2相图;(b)y1-y2相图;(c)z1-z2相图;(d)e(t)-t同步误差曲线
改进恒Lyapunov指数谱混沌系统的特性必然带给其同步体系新的性能,系统(4)中存在的两个特殊参数,即全局线性调幅参数d与倒相参数a对同步体系的状态变量波形演变也具有特殊的调节与控制作用.对于单个混沌系统而言,全局线性调幅参数d能线性调整混沌系统的状态变量演变幅值,使之上升或下降.采用文献[29,30]的推理方法可知,同步体系中响应与驱动两个子系统输出的六个状态变量演变幅值的线性调整,也同样对应于常数项控制器d的尺度变化.如图2所示,当同步体系中的d由3调整至6,在响应系统与驱动系统之间建立同步关系以后,响应系统输出的混沌吸引子相比于d=3的情况得到了放大(见图2(a),(d)),这种放大反映到混沌波形及其幅度上来也是一致的,由于d提高了1倍,状态变量的演变幅度也相应地提高了1倍(见图2(b),(e)与(c),(f)).可见,原来作用于独立混沌系统的常数项控制器d,其功能也相应转移到由响应与驱动两个子系统复合而成的同步体系中来.在改进恒指数谱混沌系统的同步体系中,常数项d依然能对同步体系输出的状态变量演变幅值进行同步升降控制,常数项控制器d是同步体系的全局幅度调节器.
继续考察倒相参数a在同步体系中的作用.文献[30]指出,由于混沌系统具有初始值敏感性,而系统的初始值又是人为强制设定的,初始值是系统振荡的起点,因此为了观测到a的严格倒相作用,需要将系统初始值设定为(x0,y0,z0)(其中z0=0),或者在改变a的极性的同时,将系统初始值中z0的坐标也设定为原来的相反数-z0,否则倒相作用将由于初始值z0坐标的强扭作用而被遮蔽.同样采用文献[29,30]的推理方法,可以推断,倒相参数a对于同步体系中驱动与响应两个子系统的特定状态变量也具有倒相控制作用.不妨将驱动系统的初始值坐标设定为(1,-1,0),响应系统的初始值坐标设定为(-1,1,0),改变倒相参数极性,使a=-3,响应与驱动两个子系统之间同样很快建立起了同步关系(见图3(a)),而同步体系中响应系统输出的混沌信号z2(t),相比于a=3的情况得到了严格的倒相控制(见图3(b)).当然,驱动系统的相应混沌信号z1(t)也一样被严格倒相,因为响应系统与驱动系统之间是完全同步的.保持驱动系统的初始值不变,将响应系统的初始值坐标设定为(-1,1,2)时,改变倒相参数使a=-3以后,响应系统输出的z2(t)信号被倒相,但是由于初始值的强制作用,使得这个倒相作用受到遮蔽(见图3(c)).当响应系统的初始值设定为(-1,1,2)时,在a改变极性以后,相应地将此初始值的z0坐标也作相反数设置,即设定为(-1,1,-2),这样,同步体系中响应系统输出的z2(t)信号的倒相作用将清晰地显现出来(见图3(d)).值得强调的是,同步体系的工作状态受到驱动系统的初始值的影响很大,如果驱动系统设置不合适的初始值,有可能会导致驱动系统根本不振荡,此时也就无所谓同步问题,而响应系统的初始值设定则相对比较自由,只是在观测倒相参数的倒相控制作用时,需要初始值中的z0坐标随倒相参数a的极性改变的同时设置为其相反数.

图2 参数d实现幅度调节 (a)混沌吸引子在x-z的平面投影(d=3),(b)信号x2(t)(d=3), (c)信号幅值(d=3),(d)混沌吸引子在x-z的平面投影(d=6),(e)信号x2(t)(d=6),(f)信号幅值(d=6)
可见,改进恒Lyapunov指数谱混沌系统中存在的两个特殊参数,赋予了其同步体系新的可控制性,全局线性调幅参数d对响应与驱动两个子系统状态变量的演变幅值实现线性增减控制,而伴以响应系统初始值的相应调整,倒相参数a可以对同步体系中两个子系统的状态变量z(t)实施同步倒相控制.这种由混沌系统的特殊性所带来的幅度与相位可控性是其他混沌系统的同步体系所没有的,同步体系的新的幅度与相位可控性,为恒指数谱混沌系统的工程应用提供了更大的应用空间.
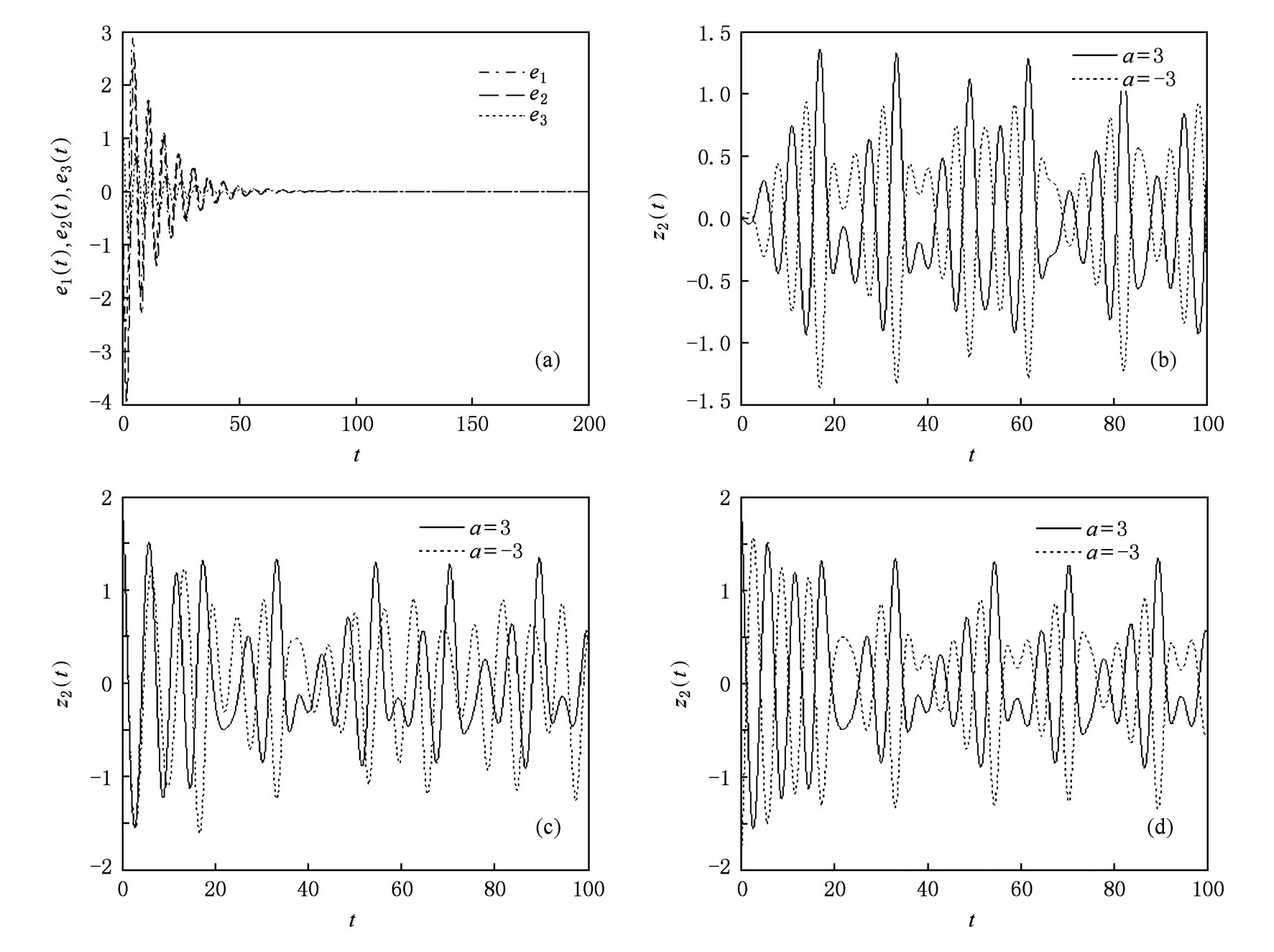
图3 参数a的倒相控制作用 (a)a=-3时的同步误差曲线,(b)信号z2(t)(初始值(-1,1,0)),(c)信号z2(t)(初始值中z0坐标不随a变极性),(d)信号z2(t)(初始值中z0坐标随a变极性)
3.2.广义投影同步:λ=k≠1
(10)式指出,当选择不同的λ时,响应系统的状态变量将是驱动系统的对应状态变量的λ倍,也就是响应系统与驱动系统之间实现了广义投影同步.不妨将响应系统与驱动系统之间状态变量的误差定义为e1=x2-λx1,e2=y2-λy1,e3=z2-λz1.设置参数a=d=3,b=0.4,c=1.62,β=0.5, λ=-2,驱动系统与响应系统的初值分别为(1,-1,0)和(-1,1,0)时,采用ODE45算法,得到响应系统与驱动系统的同步效果,如图4所示.讨论λ取不同值的情况,分析同步体系的输出信号波形,验证响应系统与驱动系统之间实现广义投影同步,有:当λ>1时,响应系统实现对驱动系统输出信号的同相放大,如图5(a)所示;当λ<-1时,响应系统实现对驱动系统输出信号的倒相放大,如图5(b)所示;当0<λ<1时,响应系统实现对驱动系统输出信号的同相缩小,如图5(c)所示;当-1<λ<0时,响应系统实现对驱动系统输出信号的倒相缩小,如图5(d)所示.
注意到,当选择λ=-2时,响应系统(9)的输出状态在变成驱动系统(5)的2倍的同时,响应系统的状态变量也将与驱动系统的状态变量保持反相关系,如图4(c),(d)和图5(b)所示,这正是广义投影同步中比例因子的作用.可见,这里的λ起到调整同步体系内部响应、驱动系统状态变量之间的比例关系(包括幅度关系与相位关系)的作用,也是一种比例因子,但要注意这种同步比例因子是响应系统与驱动系统之间的比例,而不是驱动系统与响应系统之间的比例[31],在数值上两者有倒数的关系.
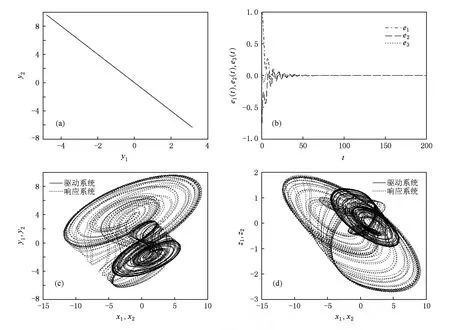
图4 响应系统与驱动系统实现广义投影同步 (a)状态变量相图y1-y2,(b)同步误差曲线e(t),(c)同步体系的混沌吸引子在x-y的平面投影,(d)同步体系的混沌吸引子在x-z的平面投影

图5 同步体系的状态变量x(t)波形 (a)λ=2,(b)λ=-2,(c)λ=0.5,(d)λ=-0.5

图6 d=1.5时的同步情况 (a)状态变量波形x(t),(b)混沌吸引子在x-z平面的投影
根据前面分析,恒指数谱混沌系统中存在的全局线性调幅参数d,同样可以对广义投影同步体系中两个子系统状态变量的幅度实施同步升降控制.如图6所示,当同步体系中的d=3更改为d=1.5时,接着前面的λ=-2时的广义投影同步进行讨论,在响应与驱动两个子系统建立同步关系以后,同步体系输出的混沌信号相比于d=3的情况得到了缩小(图6(a)与图5(b)相比较),同步体系中响应与驱动系统输出的混沌吸引子相比于d=3的情况也有了等比例的压缩(图6(b)与图4(d)相比较).倒相参数也同样可以对同步体系中响应与驱动两个子系统中状态变量z(t)信号的相位实施同步倒相控制(同样要注意初始值中的z0坐标的设定,因为初始状态是外界设置的,不是系统的自然状态),如图7所示.当同步体系中的a由a=3更改为a=-3时,接着上面的λ=-2时的广义投影同步进行讨论,在响应与驱动两个子系统之间建立起同步关系以后,同步体系输出的混沌信号z(t)相比于a=3的情况受到了倒相控制,如图7(a)和(b)所示,由于a的倒相作用,原来的波峰变成了波谷,波谷变成了波峰;当然,同步体系输出的混沌吸引子也在z方向有了颠倒(比较图7(d)与图4(d)),而在x与y向保持不变(比较图7(c)与图4(c)).
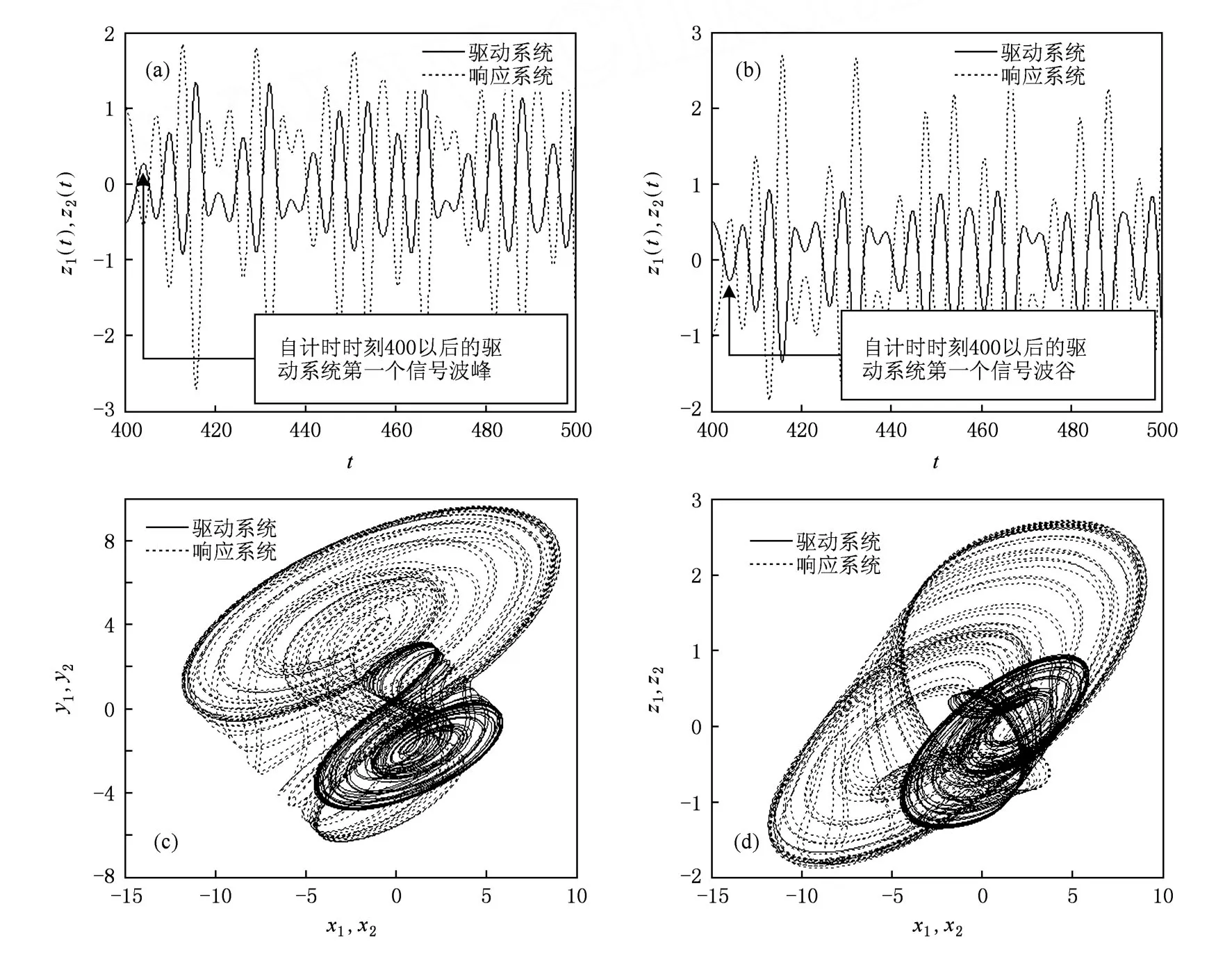
图7 同步体系的倒相控制 (a)a=3时的状态变量波形z(t),(b)a=-3时的状态变量波形z(t),(c)a=-3时的混沌吸引子在x-y的平面投影,(d)a=-3时的混沌吸引子在x-z的平面投影
综上所述,恒指数谱混沌系统的两个独特参数全局线性调幅参数d与倒相参数a增加了同步体系新的可控性,全局线性调幅参数d起到外部同步调整状态变量幅值的作用,倒相参数a对同步体系两个子系统的状态变量z(t)进行同步倒相控制.对于广义投影同步而言,由于存在调节响应系统与驱动系统状态变量之间比例关系的比例因子λ,因此,不妨将这两个具有特殊控制作用的参数定义为同步体系的外部控制因子,全局线性调幅参数d是状态变量幅度外控因子,而倒相参数a是其中状态变量z(t)的倒相外控因子.通过同步体系中比例因子λ、幅度外控制因子d以及相位外控因子a等三个参数的协同作用,可以容易地实现同步体系状态变量的幅度与相位的灵活控制.
4.电路实验仿真
上述基于广义同步理论构建的恒指数谱同步体系只包含驱动系统与响应系统两个部分,系统结构简单,电路容易实现.同步体系中驱动系统固定,通过选择不同的与系数矩阵对易的矩阵,构造不同的响应系统,从而实现完全同步、广义投影同步以及一般的广义同步.驱动系统的电路设计直接采用文献[29]所提供的电路模型,这里不再重复.响应系统的电路设计也基于同样的结构,根据(9)式,只要添加合适的线性反馈项与非线性反馈项即可实现,具体电路如图8所示.

图8 同步体系中响应系统的电路结构
根据电路理论以及各元件的特性,可以得到图8电路的状态方程为
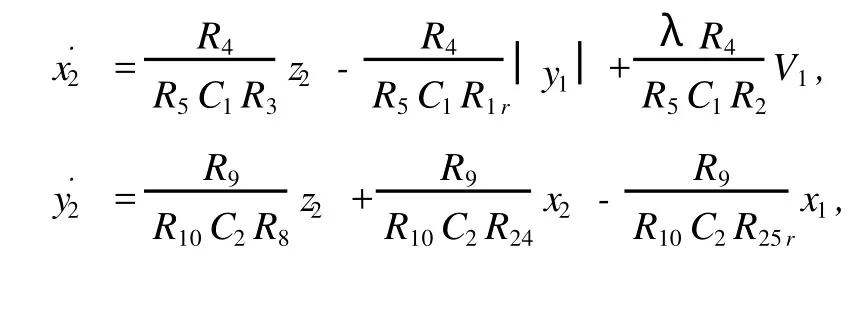

与响应系统的电路方程一致.当同步系统参数取a =3,b=0.4,c=1.62,d=3时,对应地设置电路元器件参数为:C1=C2=C3=1μF,R1= 27.778 kΩ,R2=45 kΩ,R3=15 kΩ,R4=900Ω, R5=20 kΩ,V1=3 V,R8=15 kΩ,R9=900 kΩ, R10=20 kΩ,R13=R14=120 kΩ,R15=50 kΩ,R16=400Ω,R17=20 kΩ,其他反相器的电阻都统一设置为1 kΩ.为表示方便,图中响应系统与驱动系统的相同部分采用同名电阻、运放或者信号,不同部分(包括新增部分)采用不同的标识.响应系统的特殊参数要根据同步要求与不同的同步方法来设置.当β=0.5时,设置R24=90 kΩ;对应不同的λ值,选择R1r=(27.778/|λ|)kΩ,R25r=(90/|λ|) kΩ来实现(当λ为负数时,要同时将反馈信号的极性作对应的调整);响应系统的直流电源大小也根据λ来设定,当λ为负数时,也要同时将电源极性颠倒.
由于广义投影同步中,当λ=1时,就是完全同步.因此,限于篇幅,这里只讨论一般的广义投影同步的电路实验.令λ=-2,也就是将响应系统参数设置为R1r=13.889 kΩ,并将相应支路的反馈信号-|y1|改为|y1|;R25r=45 kΩ,并将相应支路的反馈信号-x1改为x1;响应系统中的直流输入电压相应调整为-6 V,这样构建的响应系统与驱动系统实现广义投影同步,同步效果如图9所示;同步体系中响应系统与驱动系统的混沌波形如图10所示(明线为驱动系统的状态波形,暗线为响应系统的状态波形),由图10可见,当λ=-2时,同步实现以后,响应系统的状态变量是驱动系统对应状态变量的倒相放大;响应系统的混沌吸引子如图11所示.当同步体系中的d由3调整至1.5时,在建立起同步以后,响应系统的混沌吸引子如图12所示,与图11比较可见,d缩小一倍,相应的混沌吸引子之跌宕区间在横、纵坐标方向都缩小了一倍.调整同步电路中的参数a,使之极性改变(这通过对电路中的反馈信号进行调整来实现),从而得到相应的混沌吸引子如图13所示.比较图13与图11可见,由于a的极性改变,使得混沌吸引子在z方向上颠倒了一下,图14给出的混沌波形(同样明线代表驱动系统,暗线代表响应系统),进一步验证了a的极性改变对z(t)信号的倒相作用.观察图14(c)与图10(c)发现,在z(t)波峰的地方变成了波谷,波谷的地方也变成了波峰,而图14(a),(b)与图10(a),(b)相比,没有波峰与波谷的转换,也说明a的极性改变对x(t)与y(t)信号没有倒相作用.以上结果验证了全局线性调幅参数d与倒相参数a对于同步体系的幅度与相位的控制作用,与前面的数值仿真结果一致.
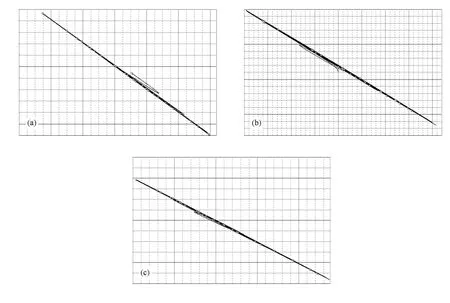
图9 电路同步实验状态变量相图 (a)x1-x2(横坐标0.5 V/div,纵坐标2 V/div),(b)y1-y2(横坐标0.2 V/div,纵坐标1 V/div),(c)z1-z2(横坐标0.1 V/div,纵坐标0.5 V/div)
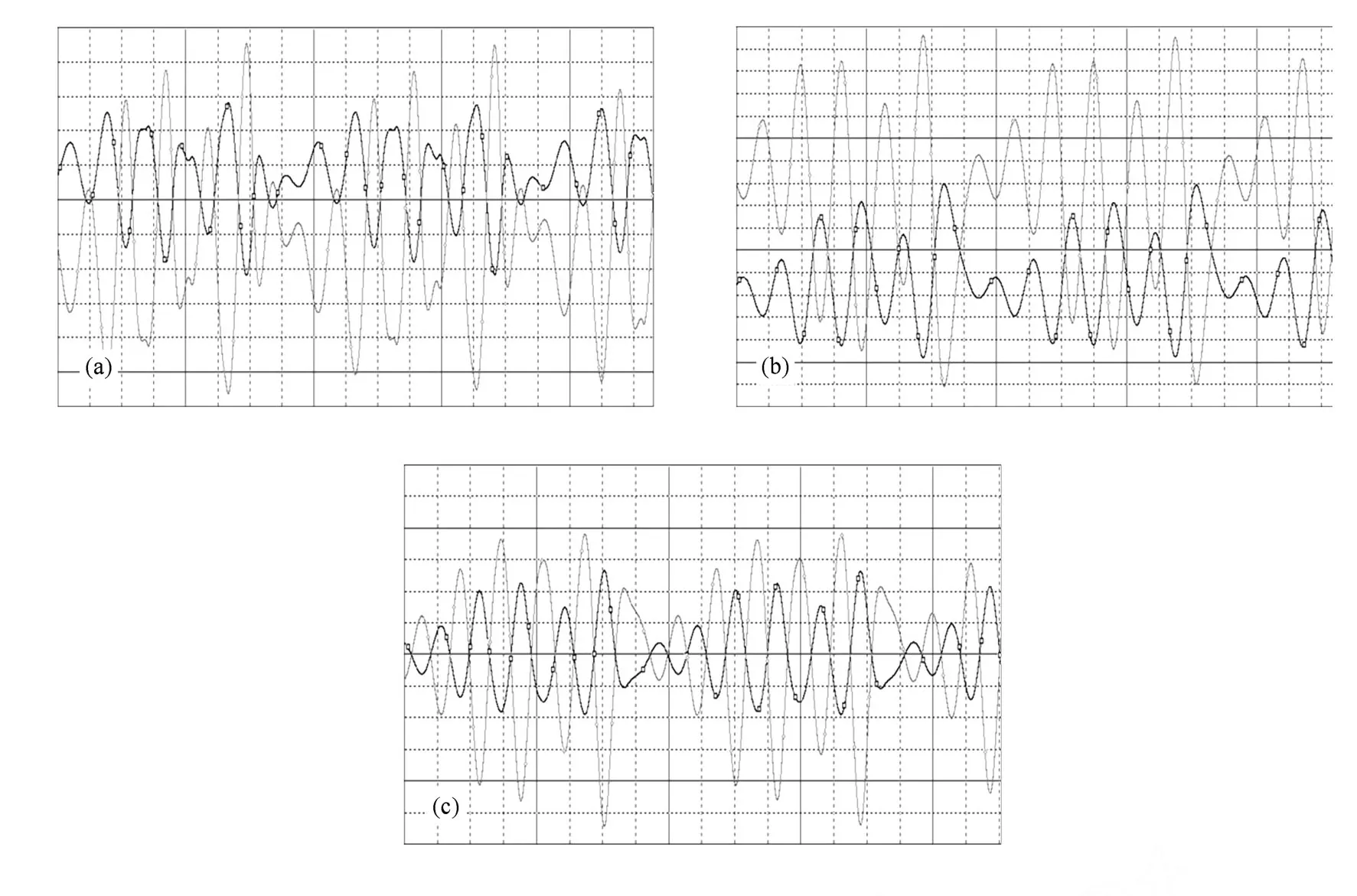
图10 电路同步实验观察到的状态变量波形图 (a)x(t)(横坐标5 s/div,纵坐标2 V/div),(b)y(t)(横坐标5 s/div,纵坐标1 V/div),(c)z(t)(横坐标5 s/div,纵坐标0.5 V/div)
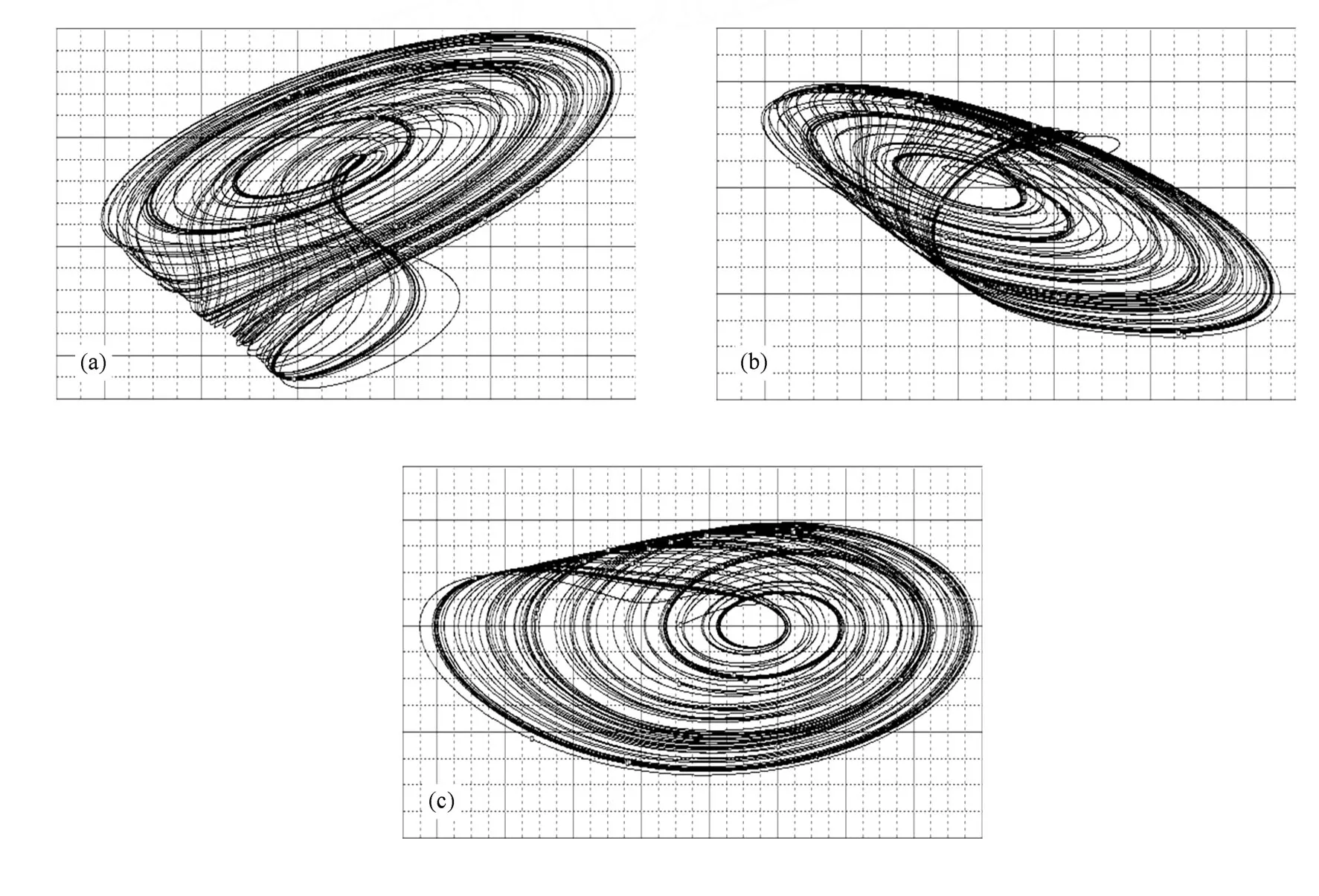
图11 响应系统混沌吸引子(d=3) (a)x2-y2的平面投影(横纵坐标1 V/div),(b)x2-z2的平面投影(横坐标1 V/div,纵坐标0.5 V/div),(c)y2-z2的平面投影(横纵坐标0.5 V/div)

图12 响应系统混沌吸引子(d=1.5) (a)x2-y2的平面投影(横纵坐标1 V/div),(b)x2-z2的平面投影(横坐标1 V/ div,纵坐标0.5 V/div),(c)y2-z2的平面投影(横纵坐标0.5 V/div)
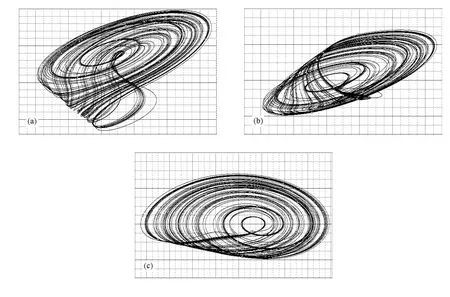
图13 响应系统混沌吸引子(a=-3) (a)x2-y2的平面投影(横纵坐标1 V/div),(b)x2-z2的平面投影(横坐标1V/ div,纵坐标0.5 V/div),(c)y2-z2的平面投影(横纵坐标0.5 V/div)

图14 电路同步实验状态变量波形图(a=-3) (a)x(t)(横坐标5 s/div,纵坐标2 V/div),(b)y(t)(横坐标5 s/div,纵坐标1 V/div),(c)z(t)(横坐标5 s/div,纵坐标0.5 V/div)
5.结 论
根据恒Lyapunov指数谱混沌系统的特殊结构,可以得到该系统新的同步方法;从该系统的特殊参数出发又可得到其同步体系的新调节因子.本文基于广义同步的基本原理,构造合适的驱动系统与响应系统,研究了恒Lyapunov指数谱混沌系统的同步方法;从广义同步引申开去,通过改变响应系统的一些参数,实现了恒指数谱混沌系统的完全同步与广义投影同步.改进恒Lyapunov指数谱混沌系统的同步体系具有三个重要的调节因子,全局线性调幅参数d能对驱动与响应系统的状态变量幅值实施同步升降控制,倒相参数a能对某一特定状态变量z(t)实施同步倒相控制,而比例因子λ则对响应系统与驱动系统状态变量之间的幅度与相位关系进行内部锁定与控制.全局线性调幅参数d(幅度调节器)与倒相参数a(相位调节器)是外调节因子,比例因子(幅相锁定器)是内调节因子,内外调节因子的协同作用,使得改进恒Lyapunov指数谱混沌系统的同步体系更加灵活、可控.数值仿真与实验仿真验证了上述同步方案的正确性与可实施性,也验证了内外三个调节因子各自的控制与调节作用.
[1]HuW,Liu Z,Li C B 2008IEEE Trans.Aero.Electr.Sys.44 367
[2]Liu Z,Zhu X H,HuW 2007Int.J.B ifurcat.Chaos17 1735
[3]Kolumbán G,KennedyM P,Chua L O 2002IEEE Trans.Circ. Syst.I45 1129.
[4]Pecora L M 1990Phys.Rev.Lett.64 821
[5]Maggio GM,diBernardoM 2000IEEE Trans.Circ.Syst.I47 1160
[6]Carroll TL,Pecora L M 1991IEEE Trans.Circ.Sys.38 453
[7]Par mananda P 1998Phys.Lett.A 240 55
[8]Wang F Q,Liu C X 2006Acta Phys.Sin.55 5055(in Chinese)[王发强、刘崇新2006物理学报55 5055]
[9]Zhu Z Y 2006Acta Phys.Sin.55 6248(in Chinese)[朱志宇2006物理学报55 6248]
[10]Wang F Z,Qi G Y,Chen Z Q,Zhang Y H,Yuan Z Z 2006 Acta Phys.Sin.55 4005(in Chinese)[王繁珍、齐国元、陈增强、张宇辉、袁著祉2006物理学报55 4005]
[11]WangX Y,Meng J 2008Acta Phys.Sin.57 0726(in Chinese) [王兴元、孟 娟2008物理学报57 0726]
[12]Guan X P,Fan Z P,Peng H P,Wang Y Q 2001Acta Phys. Sin.50 2108(in Chinese) [关新平、范正平、彭海朋、王益群2001物理学报50 2108]
[13]Li G H,Zhou S P 2007Chaos Soliton.Fract.32 516
[14]Jia Z,Lu J A,Deng G M,Zhang Q J 2007Chin.Phys.16 1246
[15]Li C B,WangD C 2009Acta Phys.Sin.58 764(in Chinese) [李春彪、王德纯2009物理学报58 764]
[16]Hu J,ZhangQ J 2008Chin.Phys.B 17 503
[17]Wu X J,Lu H T,Shen SL 2009Phys.Lett.A 373 2329
[18]Mainieri R,Rehacek J 1999Phys.Rev.Lett.82 3042
[19]Li Z G,Xu D L 2001Phys.Lett.A 282 175
[20]Xu D L 2001Phys.Rev.E 63 27201
[21]Wang X Y,Wang Y 2007Acta Phys.Sin.56 2498(in Chinese)[王兴元、王 勇2007物理学报56 2498]
[22]Yan J P,Li C P 2005Chaos Soliton.Fract.26 1119
[23]Li G H 2006Chaos Soliton.Fract.30 77
[24]Feng C F,Zhang Y,Sun J T,QiW,Wang Y H 2008Chaos Soliton.Fract.38 743
[25]Peng G J,Jiang YL,Chen F 2008Phys.A 387 3738
[26]Li C P,Yan J P 2006Chaos Soliton.Fract.30 140
[27]Min F H,Wang Z Q 2007Acta Phys.Sin.56 6238(in Chinese)[闵富红、王执铨2007物理学报56 6238]
[28]Guo L X,Xu Z Y,HuM F 2008Chin.Phys.B 17 4067
[29]Li C B,Chen S,Zhu H Q 2009Acta Phys.Sin.58 2255(in Chinese)[李春彪、陈 谡、朱焕强2009物理学报58 2255]
[30]Li C B,Wang H K 2009Acta Phys.Sin.58 7514(in Chinese) [李春彪、王翰康2009物理学报58 7514]
[31]Li C B,Shan L,WangD C 2009Acta Phys.Sin.58 6016(in Chinese)[李春彪、单 梁、王德纯2009物理学报58 6016]
[32]KocarevL,ParlitzU 1996Phys.Rev.Lett.76 1816
[33]Gao Y,Weng J Q,Luo X S,Fang J Q 2002J.Electr.Infor m. Tech.24 855(in Chinese)[高 远、翁甲强、罗晓曙、方锦清2002电子与信息学报24 855]
Li Chun-Biao1)2)†Hu Wen3)
1)(Department of Engineering Technology,Jiangsu Institute of Econom ic and Trade Technology,Nanjing 210007,China)
2)(Department of Electric Source and System,Research and Development Center of Food Safety Engineering Technology of Jiangsu Province,Nanjing 210007,China)
3)(School of Infor mation Science and Technology,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
PACC:0545
Synchronization methods and properties of the improved chaotic system with constantLyapunov exponent spectrum*
6 May 2009;revised manuscript
9 June 2009)
The existence of special piecewise-linear structure,global linear amplitude adjuster and phase-reverse controller in improved chaotic system with constant Lyapunov exponent spectrum contributed much to finding new synchronization methods and new adjusting parameters.According to the principle of generalized synchronization,by constructing appropriate driving system and response system,generalized synchronization of the improved chaotic system with constant Lyapunov exponent spectrum then can be achieved.By changing the parameter of response system,the complete synchronization and generalized projective synchronization can be further realized.The amplitude of the state variable of the driving system and the response system can be controlled to increase and decrease synchronously by the global linear amplitude adjuster,while the phase of certain variables can be controlled to reverse synchronously by the phase-reverser. This synchronization system dispenseswith other special controllers,possesses simple structure and so can be implemented easily.Finally,the implement circuit of synchronization system is designed.It is validated by experiment simulation that the synchronization methods are feasible,the amplitude and the phase of the state variable in the synchronization system can be controlled by special parameters of the improved chaotic system.
improved chaotic system with constant Lyapunov exponent spectrum,synchronization,amplitude control, phase-reverse control
*江苏省“青蓝工程”(批准号:苏教师[2008]30号)和航空基金(批准号:2009ZC52038)资助的课题.
†E-mail:goontry@126.com
*Project supported by the QingLan Project of Jiangsu Province,China(Grant No.[2008]30)and the Aeronautical Science Foundation of China (GrantNo.2009ZC52038).
†E-mail:goontry@126.com
