DVD循轨伺服控制系统设计及参数优化
2010-08-08王晓健
王晓健
(潍坊职业学院 机电工程系,山东 潍坊 261031)
DVD光驱循轨伺服控制机构如图1所示,其等效物理模型可以看成双车结构,小车通过一个弹簧和阻尼器连接到大车,它们之间存在着复杂的耦合关系。其中大车对应着粗调致动器,一般是一台直流无刷电机,主要用来长距离寻轨,它有一个大的移动范围,但是带宽比较小,响应速度较慢。小车对应的微调致动器是一个音圈电机,承载着激光读写器 OPU(Optical Pick-Up),主要作用是短距离寻轨和循轨,径向移动范围较小,但是带宽比较大,响应速度快,比较灵敏。当光驱开始循轨时,外界干扰(如震动、盘片偏心或者盘面划痕等)很容易引起激光读写器的光点不能聚焦于光盘的轨道中心,而产生偏摆(Run-Out)现象,甚至脱轨,给准确高速读取DVD盘片带来困难。
1 问题描述

图1 循轨伺服等效物理模型
随着技术的进步,光盘转速不断提高,虽然光驱系统读取数据的速率得到加快,但是,不可避免的是,其相应的周期干扰信号的频率也会因此提高。为了能够有效地控制高频率的周期干扰信号在要求的范围内,系统闭环回路在相应高频段的增益也要提高。在DVD光驱循轨伺服控制系统的设计中,有两个重要指标是必须考虑的:一个是扰动抑制率(disturbance attenuation),另一个是鲁棒稳定性(robust stability)。但是,这两者之间是相互矛盾的,需要寻找两者的平衡。例如,高闭环回路增益可以有利于扰动的抑制,但是会降低系统的稳定裕度。正因为这个原因,控制器的设计需要大量的实验,并且设计出的控制器因为阶次比较高,很难再应用于实际系统中。
因此,在光驱通知读取盘片时,单一的一个滞后超前控制器很难满足系统的要求。为了增强系统抑制周期扰动信号的能力,系统在原来的基础上加入了重复控制器,如图2所示。其中r是系统输入,y是系统的输出,d是run-out干扰,TE(tracking errors)是系统的循轨误差,控制器C(s)为一滞后超前控制器,对象P(s)是系统双车结构的辨识模型,Cr(s)是S.Hara在牺牲系统高频增益的前提下,提出的一种改进的重复控制器。此时,系统的开环传递函数G=Cr*C*P。
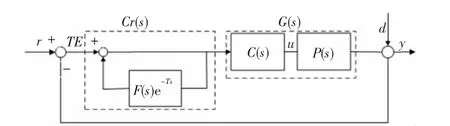
图2 含重复控制器的循轨伺服系统框图
2 重复控制器的设计及参数优化
2.1 重复控制器定义和稳定条件
重复控制器结构如图2中的Cr所示。其中,F(s)为一个低通滤波器,一般取 F(s)=1/(1+τs),e-Ts为一延迟环节,代表把信号延迟T个时间单位,T为外界干扰信号的周期。S.Hara分析并提出了这种重复控制系统稳定条件。
定理:假设P(s)和 C(s)没有不稳定的零极点对消,因而G(s)没有隐含的不稳定极点,并且其输入、输出稳定性与最小实现的内部稳定性是一致的。这时,若:
(1)[1+G(s)]-1·G(s)是稳定的有理函数代数式;
(2)对于 QF=F(s)·[1+G(s)]-1,有‖QF‖<1。
则图2所示的含重复控制器的循轨伺服系统是指数渐近稳定的。可见含有重复控制器的系统稳定性条件就是满足定理中的条件(1)和(2)。
2.2 重复控制器的设计
首先,根据循轨伺服规格ECMA-267设计一个串联滞后控制器 G1(s)=Clead·Clag和比例控制器 K:

可以得到系统的开环传递函数:G(s)=C(s)·P(s);此时,校正后|1+G(jω)|的波特图符合循轨伺服规格ECMA-267,并且满足定理中的条件(1),如图3中的实线所示。

其中 F(jω)≈1,∀ω∈ΩT。


图3 设计中的F(s)解决方案
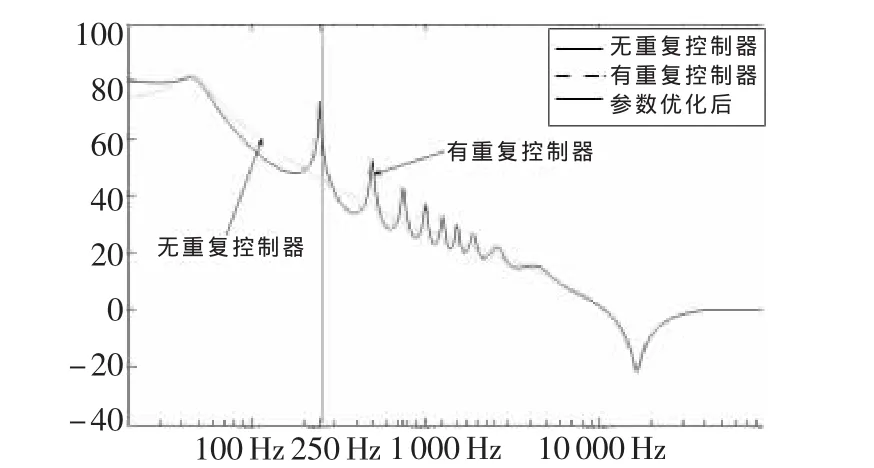
图4 含有重复控制器的系统波特图
2.3 重复控制器的参数优化


其中K1,K2,ω0是与重复控制器有关的常数。
又欧拉方程 e-Ts=e-Tω·j=cos(-Tω)+jsin(-Tω),

此时,系统闭环传递函数的幅值特性为:

易知,将式(3)和式(4)代入式(5),得到以 T和 τ为自变量的二元非线性函数 f(T,τ),此时,问题转化为含约束条件的优化问题:

图5 系统250 Hz处波特图

图6 误差输出对比

由于该问题是带约束条件的二元非线性函数优化问题,不能给出和的解析解,一般通过搜索算法利用计算机完成T和τ的确定。
3 仿真与结论

本文的创新点在于提出了一种设计重复控制器参数的图形化方法,简单直观,易于工程实现,具有一定的实用价值。并且根据多次试验结果,发现该方法设计的参数并不是系统最优,即系统的稳定裕量还不是最大值,作者提出了参数优化的思想,给出了该优化问题的数学表达式,达到了更好的周期干扰抑制效果。
[1]中野道雄,井上惠,山本裕.重复控制[M].吴敏,译.长沙:中南工业大学出版社,1994.
[2]DVD Forum:DVD specification for read-only disc-Part 1.Physical pecifications,Version 1.1.1999.
[3]HARA S, YAMAMOTO Y, OMATA T, et al.Repetitive control system:a new type servo system for periodic exogenous signals[J].IEEE Transactions on Automatic Control,1988,33(7):659-668.
[4]赵海燕,吴忠强.逆变电源的自适应重复控制方案[J].微计算机信息,2006,22(16):50-51.
