非量测数码相机内方位元素及畸变差检校研究
2010-07-17郑波陆珏王卫安
郑波 陆珏 王卫安
1 概述
随着数码相机以及计算机技术的发展和应用,数字摄影测量的发展也愈加迅速[1,2]。量测相机的内方位元素参数是已知的,其影像具有明确的几何位置关系。但量测摄影机价格昂贵,仪器笨重,进行外业拍摄时很不方便。与之相比,非量测数码相机具有价格较低,信息处理效率高,适应性强等优点。然而一般非量测相机是不能提供内方位元素的,且由于相机物镜在加工、安装和调试过程中难免存在一定的残余像差,引起物镜构像畸变。为保证摄影测量成果质量满足任务中精度要求,对其各参数的检校成为一项重要工作。
2 相机检校内容和原理
2.1 镜头畸变
物镜构像畸变有两种:径向畸变差和切向畸变差。径向畸变在以像主点为中心的辅助线上是对称型畸变,而切向畸变差是一种非对称型畸变。综合分析,总像差模型可以表示为:
其中,Δx,Δy分别为镜头畸变在 x,y方向的分量;(x0,y0),(x,y)分别为像主点和像点在像框标坐标系下的坐标;k1,k2,k3均为镜头畸变参数。
2.2 直接线性变换
一般的直接线性变换(DLT)解法只考虑线性成像模型,不考虑像差,采用线性解法得到一组中间参数,然后从中间参数分解得到最终参数。利用DLT方法不需要在影像上有框标,也不需要有摄影机内外方位参数的起始近似值,因此该方法被广泛应用于对非量测相机摄取的影像的归化。DLT方法可表示为:
其中,Δx,Δy为式(1)中表示的镜头畸变参数;L1~ L11为DLT方法的11个参数。由这11个参数可以解算出内方位元素。
然而DLT方法是单模型解算,且对控制点的数量和分布要求较高,否则在解算过程中容易出现病态。
2.3 多片空间后方交会进行相机检校
本文采用空间后方交会检校方法,借助于同济大学测量馆的三维检校场,对测量车上的一个相机进行检校。并且对多片空间后方交会的成果、精度及多片空间前方交会的可靠性进行了分析。
2.3.1 检校流程
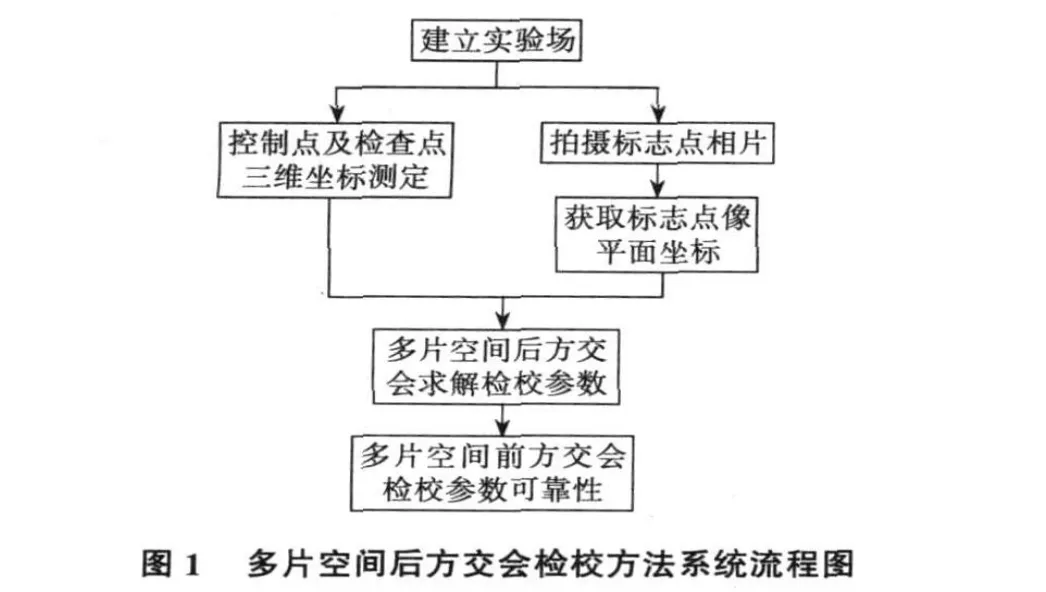
多片空间后方交会检校的大致流程见图1。
2.3.2 检校原理
空间后方交会的基本原理是共线条件方程式[3]。在建立误差方程时,以像点坐标为观测值(V),内方位元素(X内)、外方位元素(X外)和畸变参数(X畸)为未知数,进行相机检校:
其中,A,B,C均为系数矩阵。对于实验用的数码相机,一般采用一个畸变系数k1较为合适。计算过程中运用最小二乘原理VTV=min,即可求出未知参数 X外,X内和X畸。
3 实例分析
本文检校对象为同济大学移动测量车上方的一个相机,像素分辨率为1 624×1 234,在调焦于无穷远条件下进行检校。控制场选用同济大学测量馆实验场地的两面墙以及三级台阶上分布合理的58个标志点,分别采用了单张和多张像片计算。控制点用测角精度1″,测距精度0.6 mm+2 ppm的索佳 NET1200全站仪测定。由于测量距离在100 m以内,每个点测量4次,因此控制点的精度均在毫米级。本文分别利用单张以及多张像片后方交会进行检校,最终对两种方法的检校结果进行对比和分析,表1为检校结果。
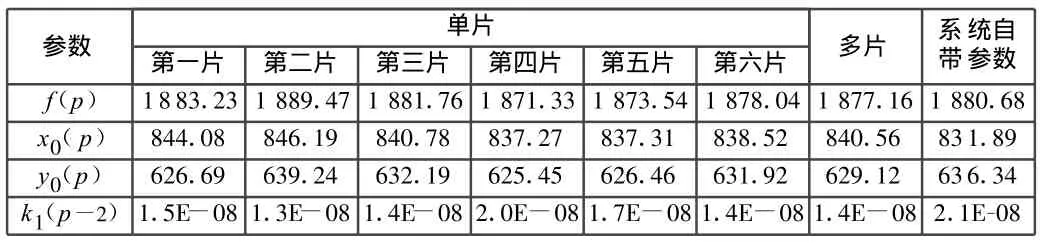
表1 相机各参数检校结果
分析表1数据可得出如下结论:1)利用单张像片所检校出的内方位元素(x0,y0),f以及畸变参数k1值都比较接近,表明在同一检校条件下的检校结果正确、稳定。2)利用多张像片后方交会计算得到的检校结果接近于各单片检校值的平均数,表明像片片数的增加可以提高检校值的可靠性。3)与移动测量系统自带的参数进行比较,发现多片后方交会的结果与自带参数接近,可以认为检校结果满足要求,两者可互为检核。
为进一步验证多张像片后方交会检校结果的可靠性,这里利用检校出的内方位元素,镜头畸变参数,6张像片的外方位元素进行多片前方交会,解算出若干个标志点的三维坐标,并与标准值进行比较,结果为:1)各标志点X方向与Y方向精度优于8 mm,Z方向的精度优于13 mm,说明多片前交的内精度较高;2)摄影平均距离为30 m,各标志点X方向差值的平均值为1.13 mm左右,Y方向差值的平均值为-1.35 mm左右,Z方向平均差值为2.27 mm左右。因此各前交点X方向与Y方向的相对精度均可达到1/20 000,Z方向的相对精度均高于1/10 000,说明多片前交的外精度较高。
4 结语
本文运用空间后方交会方法对测量车相机实施检校,通过对检校的成果分析表明:应用多片空间后方交会检校出的各参数结果正确,且经由多片空间前方交会方法进一步验证检校结果的可靠性,证明多片空间后方交会是一种较为可靠的相机检校方法。
[1] 王之卓.摄影测量原理[M].武汉:测绘出版社,1984:14-122.
[2] 冯文灏.近景摄影测量——物体外形与运动状态的摄影法测定[M].武汉:武汉大学出版社,2002:1-14.
[3] Edward M,Mikhail,James S,et al.Chris McGlone.Introduction to Modern Photogrammetry[M].Wiley,Har/Cdr edition,2001:66-103.
[4] 崔红霞,孙 杰,林宗坚,等.非量测数码相机的畸变差检测研究[J].测绘科学,2005,30(1):105-107.
[5] 王 冬,冯文灏,卢秀山.多片空间后交法实现Hasselblad相机检校[J].辽宁工程技术大学学报,2007,3(26):341-344.
[6] 苗红杰,赵文吉,刘先林.数码相机检校和摄像测量的部分问题探讨[J].首都师范大学学报(自然科学版),2005,26(1):117-120.
