基于SESAM的游钓船动力响应研究
2010-06-13赵林岗谢永和
赵林岗,徐 升,谢永和
(1.浙江海洋学院水产学院,浙江舟山 316004;2.浙江海洋学院船舶与建筑工程学院,浙江舟山 316004)
游钓船是一种特制的轻便、快速,具有导航、定位、通讯和现代服务设施的专职出租、导钓、载客的钓鱼船。除船钓外,还可以把钓客送上富鱼区的海礁、海岛荒矶上垂钓,再按航程安排,及时地接送钓客返回。游钓船设计的船速一般都在20 kn以上,这就对其要求有较高的稳性。由此可见,对游钓船进行运动和波浪载荷响应计算,有助于保障其安全作业。
SESAM系统就是基于三维线性势流理论设计的用于船舶与海洋工程结构物水动力分析计算的综合性软件。该软件不仅适用于船舶工程领域,也成功地应用于多种海洋结构物的设计和分析[1]。笔者采用SESAM程序系统的PatranPre模块对14.56 m游钓船建立水动力模型,在HydroD模块中进行运动与波浪载荷响应计算,对其水动力特性进行分析。
1 水动力计算的相关理论和程序
船舶在波浪上运动的流体动力问题关键在于求解流场中的速度势,即求解在确定的边界条件下的拉普拉斯方程。
1.1 船舶运动方程[2]
根据速度势的分布可将船舶的流体动力分解为船舶定常移动兴波所产生的定常阻力、波浪扰动力和船体运动遭受的流体反作用力(简称辐射力)组成,则船舶在规则波中的运动方程为:

式中,mij为船体质量;μij附加质量;λij为阻尼系数;Cij为恢复力系数;FkWi为佛汝德·克雷洛夫力;FdWi为波浪绕射力。
1.2 计算程序
使用SESAM程序计算船体运动与波浪载荷响应,其具体步骤如下:
1)通过PatranPre模块建立游钓船的水动力模型;
2)在HydroD中进行环境参数的设定;
3)将建好的水动力模型导入到HydroD模块中进行计算;
4)用WADAM模块确定浪向及间隔、频率及间隔等参数;
5)最后用POSTRESP模块进行后处理,得出其动力响应。
2 水动力模型
2.1 主要参数
游钓船折角线和主尺度分别见图1和表1。
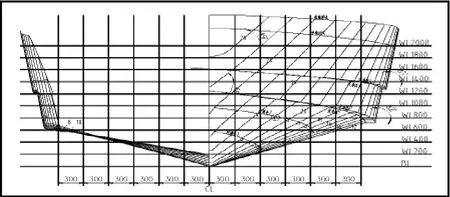
图1 折角线示意图Fig.1 Schematic diagram of knuckle line
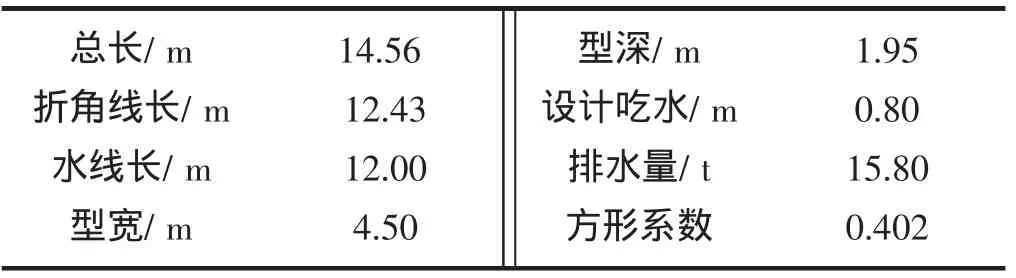
表1 主尺度Tab.1 Ship's principal dimensions
2.2 水动力模型
选用SESAM系统的PatranPre模块对其建立水动力模型即 Panel Model,如图2~4所示。坐标系x方向指向船艏,y方向指向左舷,z方向向上,坐标原点在基线面、中横剖面、中纵剖面的交点。肋位间距500 mm,以一肋位一单元进行建模,最后对模型进行优化得到水动力模型。

图2 水动力模型Fig.2 Hydrodynamic model
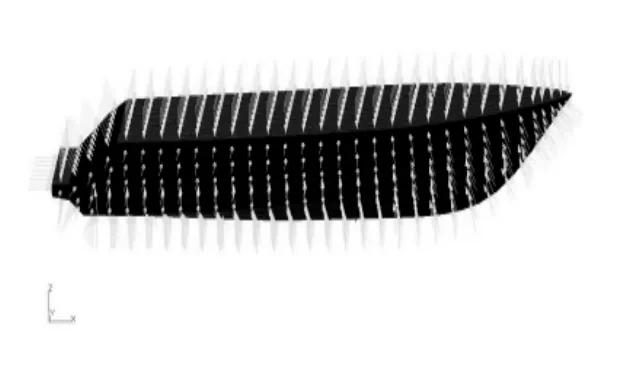
图3 施加HydroD后的模型Fig.3 Hydrodynamic model applied by HydroD
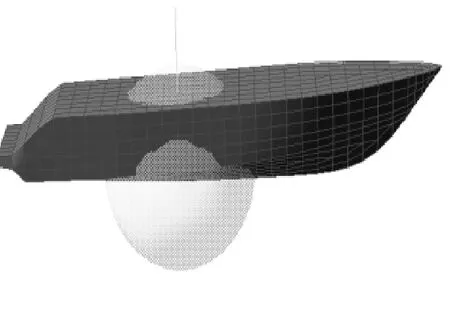
图4 HydroD中的水动力模型Fig.4 Hydrodynamic mode in HydroD
3 游钓船的波浪诱导载荷及运动响应分析
3.1 海浪谱
在一般情况下,常把海浪视为无限多个频率不等、方向不同、振幅变化而相位杂乱的微幅简谐波叠加而成的不规则波系,这些特征可以用海浪谱表示出来。通常用到的海浪谱有3种即Gamma海浪谱、Pierson-Moskowitz海浪谱和JONSWAP海浪谱。本论文中的波浪载荷直接计算采用的波浪谱是Pierson-Moskowitz海浪谱。
浪向角取值区间[0°~180°]步长为 30°,包括了 5 种浪向的波浪(迎浪、首斜浪、横浪、尾斜浪和随浪)。波浪频率为0.5~2.0 rad/s,步长为0.05 rad/s。 波浪载荷设计计算值取为10-8概率水平(代表设计寿命为20年)。
3.2 波浪诱导载荷的计算
根据上面选定的设计波,由伯努利方程计算可得游钓船的表面水压力。本论文主要计算波浪诱导弯矩,计算结果如图5所示。
3.3 运动响应分析
对游钓船通过水动力计算,可知在其运动响应中,由波浪引起的横摇(roll)、首摇(yaw)和纵摇(pitch)运动都比较小,本文中游钓船的运动响应主要考虑纵荡(surge)垂荡(heave)和横荡(sway)的影响。
由图6可以看出,在游钓船纵荡运动时,浪向角β=0°和β=180°时,船舶纵荡的运动幅值最大,并且随着波浪频率的减小而增大;浪向角β=90°时,船舶的纵荡运动幅值最小。
由图7可以看出,在游钓船垂荡运动时,浪向角β=90°时,船舶升沉的运动幅值最大;浪向角为β=0°时,船舶升沉的运动幅值最小,并且随着波浪频率的增大而减小。
由图8可以看出,在游钓船横荡运动时,浪向角β=0°和β=180°时,船舶横荡的运动幅值最小;浪向角 β=90°时,船舶横荡的运动幅值最大,并且随着波浪频率的减小而增大。
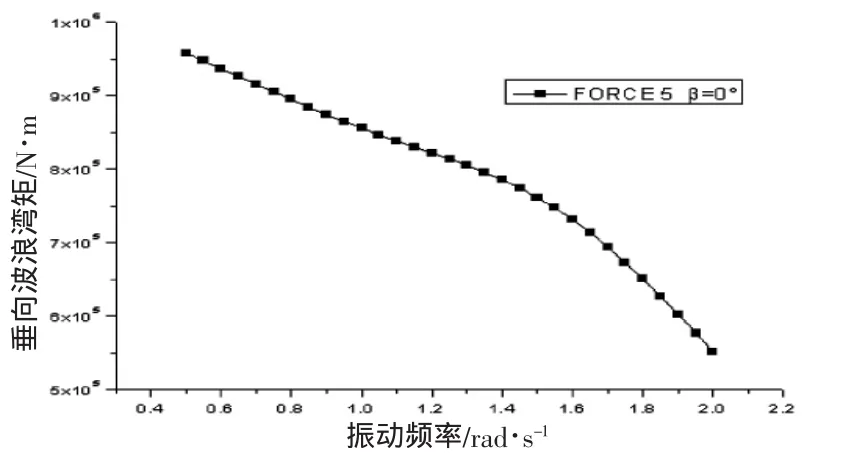
图5 波浪弯矩幅值随频率变化曲线Fig.5 Change curve of wave bending moment with frequency
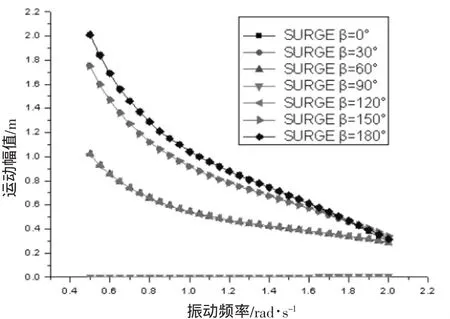
图6 纵荡运动幅值响应随频率变化曲线Fig.6 Change curve of surge amplitude with frequency
4 结束语
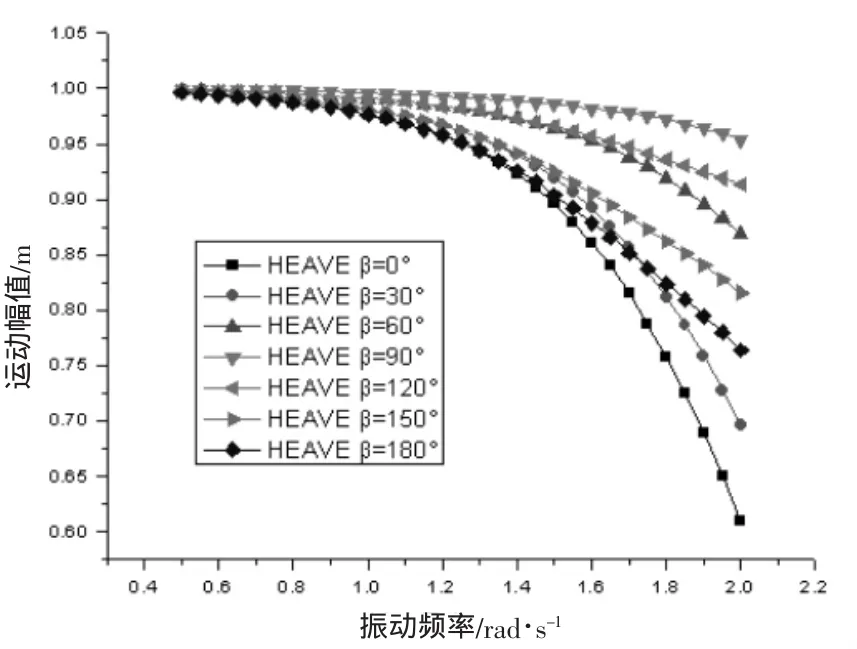
图7 垂荡运动幅值响应随频率变化曲线Fig.7 Change curve of yaw amplitude with frequency
本文依托于三维线性势流理论,运用SESAM软件中的PatranPre模块和HydroD模块对游钓船进行了波浪诱导载荷计算和运动响应分析,比较准确的预报了游钓船的水动力响应特性,可以使其在运营中避开波浪能集中的频率范围,使游钓船具有较小的波浪响应,从而确保其安全运营。
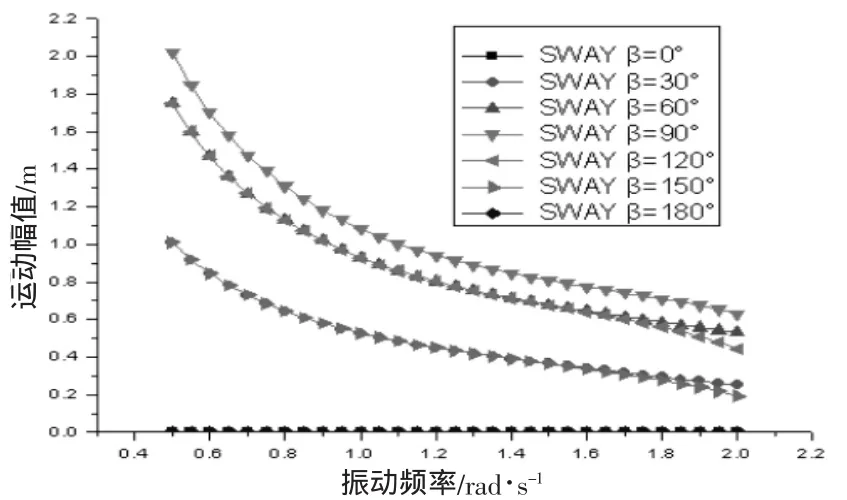
图8 横荡运动幅值响应随频率变化曲线Fig.8 Change curve of sway amplitude with frequency
[1]陈海龙,白雪平,刘成名,等.利用SESAM软件对驳船进行水动力性能分析研究[J].传感器与微系统,2009,28(12):48-50.
[2]李刚强,谢永和.肥大型集装箱船波浪诱导载荷研究[J].浙江海洋学院学报:自然科学版,2009,28(2):125-129.
[3]李润培,王志农.海洋平台强度分析[M].上海:上海交通大学出版社,1992.
[4]XIE Yong-he,LI Run-pei.Wave-Induced Loads on Very Large FPSOs at Restricted Water Depth[J].China Ocean Engineering,2005,19(2):215-224.
[5]刘应中,缪国平.船舶在波浪上的运动理论[M].北京:上海交通大学出版社,1988.
[6]STOKER J J.Water waves[M].New York:Interscience,1957.
