高精度激光温控系统设计
2010-06-05张晓杰赵宝奇刘春华唐刚锋
张晓杰,于 航,赵宝奇,刘春华,唐刚锋
(1.中航工业洛阳电光设备研究所,河南 洛阳 471009;2.空军驻北京地区军事代表局,北京 100009;3.中国人民解放军驻洛阳电光设备研究所空军代表室,河南 洛阳 471009)
0 引言
激光半导体泵浦固体激光器(DPL)以其高效率、高光束质量、结构紧凑、长寿命等优点引起人们极大的研究兴趣[1]。半导体激光器是利用半导体二极管(LD)PN结正向电流中粒子数反转实现受激辐射产生激光的[2]。对半导体来说,由于电子是在各能带之间进行跃迁,而不是在分立的能级之间跃迁,所以跃迁能量不是个确定值,这使得半导体激光器的输出波长展布在一个很宽的范围上。当温度变化时,LD输出波长会随之变化,进而影响DPL输出功率的变化,本文提出了一种控制LD温度的方法,从而保证激光器输出功率的稳定。
1 LD温度控制需求
在LD中,为实现对激光的谱线耦合,必须调整LD的输出波长,使其与激光晶体的吸收峰值匹配。LD的输出波长易受温度和注入电流的影响,一般LD温度漂移系数约为0.26~0.3 nm/℃。目前固体激光器的吸收谱线带宽很窄(对Nd:YAG的吸收峰宽度只有4~5 nm),因此LD的精确温控已成为阻碍DPL工程应用的关键技术问题。
由图1可知,Nd∶YAG激光器输出功率最大时波长为809 nm;输出功率围绕最大值波动为±10%时,波长从808.2 nm 变化到 810 nm[3];综合以上指标,则:(810-808.2)÷0.3=6℃。所以,不考虑其他因素,仅考虑LD输出波长对输出功率影响,一般为保证Nd∶YAG激光器的输出功率稳定度≤±10%,温度控制精度需要控制在±3℃以内。
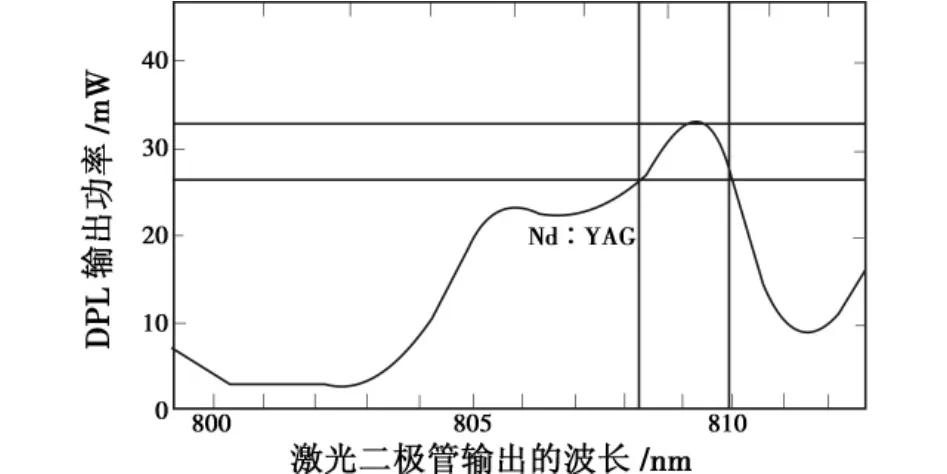
图1 激光器输出功率与LD波长的关系Fig.1 Laser output versus LD wavelength
2 LD高精度温控系统
2.1 组成及工作原理
温控电路主要由温度传感器、单片机、半导体制冷器(TEC)、驱动电路组成,如图2所示。
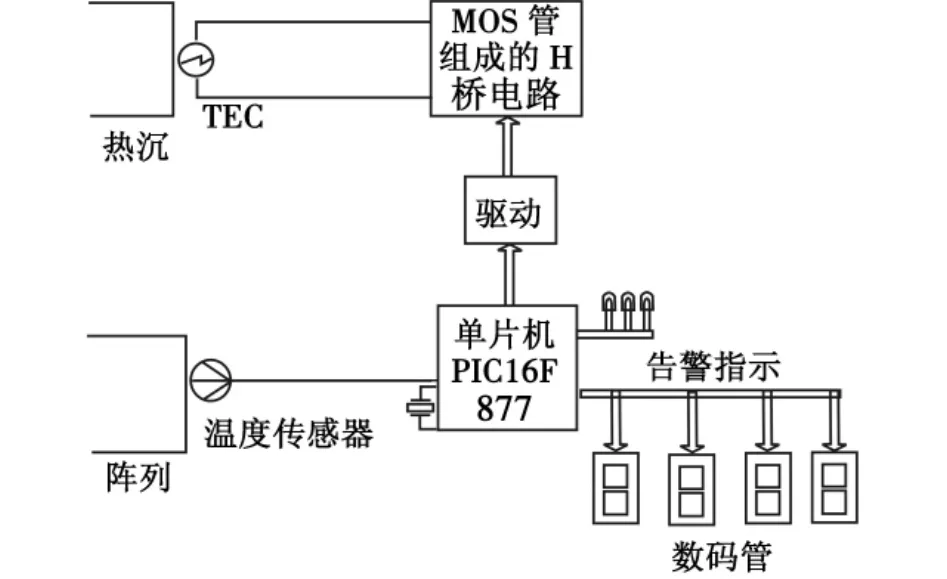
图2 温控系统原理框图Fig.2 Block diagram of temperature control system
在-45~+60℃的环境下,温度传感器实时测量半导体激光器阵列温度,单片机采集后,首先判断是否超过告警温度70℃,如果超过则启动快速控制制冷,同时告警;如果没有超过,则将实测温度与温控点温度(45℃)比较,高于温控点温度,则使TEC制冷;低于温控点温度,则TEC制热,从而使半导体阵列保持在温控点温度工作。
2.2 温度采集调理电路
考虑空间限制和测温范围因素,采用PT100铂热电阻传感器。温度传感器埋在LD阵列里,因为它是热源;为采集准确,一个LD阵列放3个传感器,然后取平均值。
采用单片机片上的8位A/D,考虑需要采集温度范围是-45~+70℃,而单片机采集的电压范围是0~5 V,根据这个精度要求设计采集电路(如图3所示),则温度采集精度高于±0.5℃。
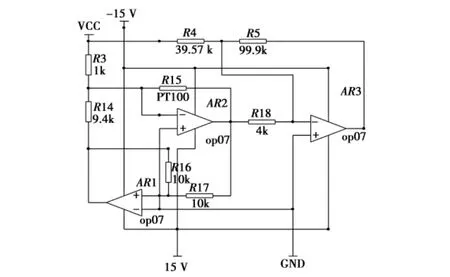
图3 温度采集电路Fig.3 Temperature acquisition circuit
2.3 驱动电路设计
普通大功率三极管和绝缘栅功率器件(包括MOSFET和IGBT等),由于器件结构的不同,具体的驱动要求和技术也大不相同。前者属于电流控制器件,要求合适的电流波形来驱动;后者属于电场控制器件,要求一定的电压来驱动[4]。
当驱动信号与功率器件不需要隔离时,有许多驱动集成电路;当需要驱动器的输入端与输出端电气隔离时,一般采用光电耦合器或利用脉冲变压器来提供电气隔离。
本电路中单片机输出的PWM信号不足以直接驱动功率管组成的H桥电路,所以需要增加驱动能力,接一个成品驱动器。目前,这类成品驱动器种类很多,如TI公司的 UCC37XXX系列、TOSIBA公司的TPS28XX系列、SHARP公司的PC9xx系列等。本设计中采用了国际整流器公司的IR2110。驱动部分电路见图4。
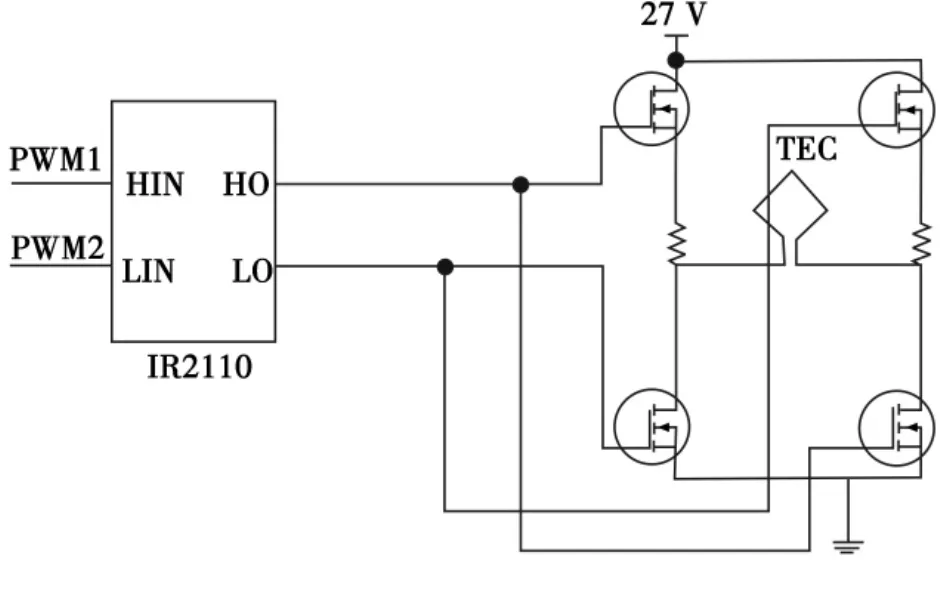
图4 TEC驱动电路示意图Fig.4 The sketch of TEC drive circuit
2.4 温控的执行元件选择及应用
基于帕尔贴(Peltier)效应制成的TEC半导体制冷器是进行制冷或加热的半导体器件[5]。在TEC两端加上直流工作电压会使TEC的一端发热,另一端制冷;把TEC两端的电压反向则会导致相反的热流向。而且尺寸、功率很多选择,并有体积小、重量轻、制冷效率高、环境适应性好、使用方便的特点。当电流一定时,产冷量随热端温度的升高而降低,为保证TEC可以提供足够的制冷量,必须对其热端充分散热,以保证冷热端温差不大于额定的最大温差。
半导体阵列通电工作时所产生的热量逐级传递,最后所有能量将由散热片散掉,所以:

式中:Q为散热功率;ΔQ为半导体制冷器的电功率;Q0为激光阵列热功率。由于激光阵列热功率为115 W,制冷片按温差60℃时最低效率40%计算,则需要制冷片的电功率为100/40%=287 W。所以,Q=ΔQ+Q0=287+115=402 W;低温下加热,要在5 min的时间从-45℃加到45℃,温差90℃,所以要求TEC有足够的功率。
根据尺寸、供电等要求,TEC选用4片Ferrotec的9500/199/100B,其尺寸为40 mm ×40 mm ×3.5 mm,其单片电气指标为 Umax=27.4 V,Imax=10 A,Qmax=148 W。安装方式见图5。
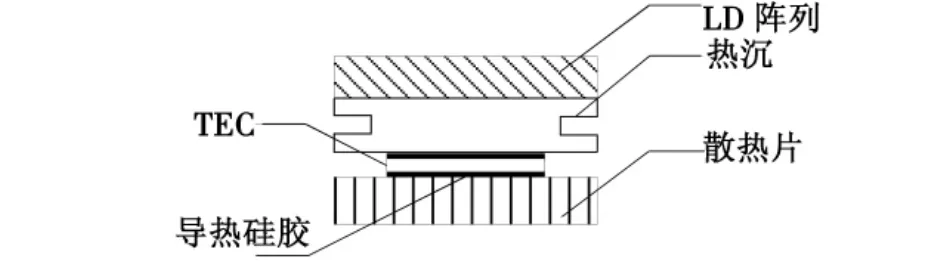
图5 TEC安装结构图Fig.5 Structure of TEC setup
半导体阵列、热沉、TEC和散热片紧紧贴在一起,其中TEC冷端接触热沉,热端接触散热片。在TEC与热沉和散热片之间均匀地涂一层导热硅脂以避免其间空气薄层对导热性的影响。
3 软件的算法以及仿真
用单片机实现控制,体积小、可靠性高、易修改。采用Microchip的PIC单片机是由于其抗干扰能力强,适合工业控制使用。由于电源内有大电流等,对抗干扰要求较高,如果采用DSP或51等单片机,则抗干扰能力差,可能误读数据,造成死机等[6-7]。
3.1 控制算法
PID算法是工业控制系统中,使用最广泛的一种方法,就是比例、积分、微分算法,可以成比例改变控制的参量,可以消除偏差,可以根据偏差的变化速率调整控制参量。该算法的优点有:计算机输出增量,所以误动作小;不需要累加,控制增量的确定仅与最近的3次采样值有关,因而比较容易通过加权处理获得比较好的控制效果,增量PID控制算式[8]为

式中:Uk为最终输出量;U(k-1)为上一次输出;Kp为PID系数;E(k)为偏差;E(k-1)为上一次的偏差;Ki为PID系数。
对PID运算的结果进行归一化,然后通过改变PWM信号的占空比改变供给TEC上的电流大小。
软件系统流程如图6所示。首先对单片机进行初始化,然后将测得的温度与设定温度进行比较。
由于PID算法是精确控制,需要一定的时间才能达到控制点。所以这里采用细分区间,在离温控点远的区域,用固定占空比的PWM信号大功率工作。试验中,TEC供电是27 V,加热时采用的占空比为50%,制冷时采用的占空比为35%;在温控点附近区域,用PID算法不断变换PWM信号的占空比,从而趋近温控点,这个区域越小,则PWM信号的占空比变化范围越小,这个区域越大,PWM信号占空比变化范围越大。本系统在高温环境下采用PID算法的区域为40~60℃,试验中,PWM信号占空比变化范围为0% ~60%。
当温度在设定的安全范围内(T<70℃)就按以上规律控制,随后显示测得的温度。当温度超限,马上调用快速控制,使TEC尽快制冷,并驱动报警电路工作。
对于PID系数的整定,是比较繁琐的。编程时只设定大概数值,然后通过反复在实际控制对象上进行的实验,才能找到理想的参数值。
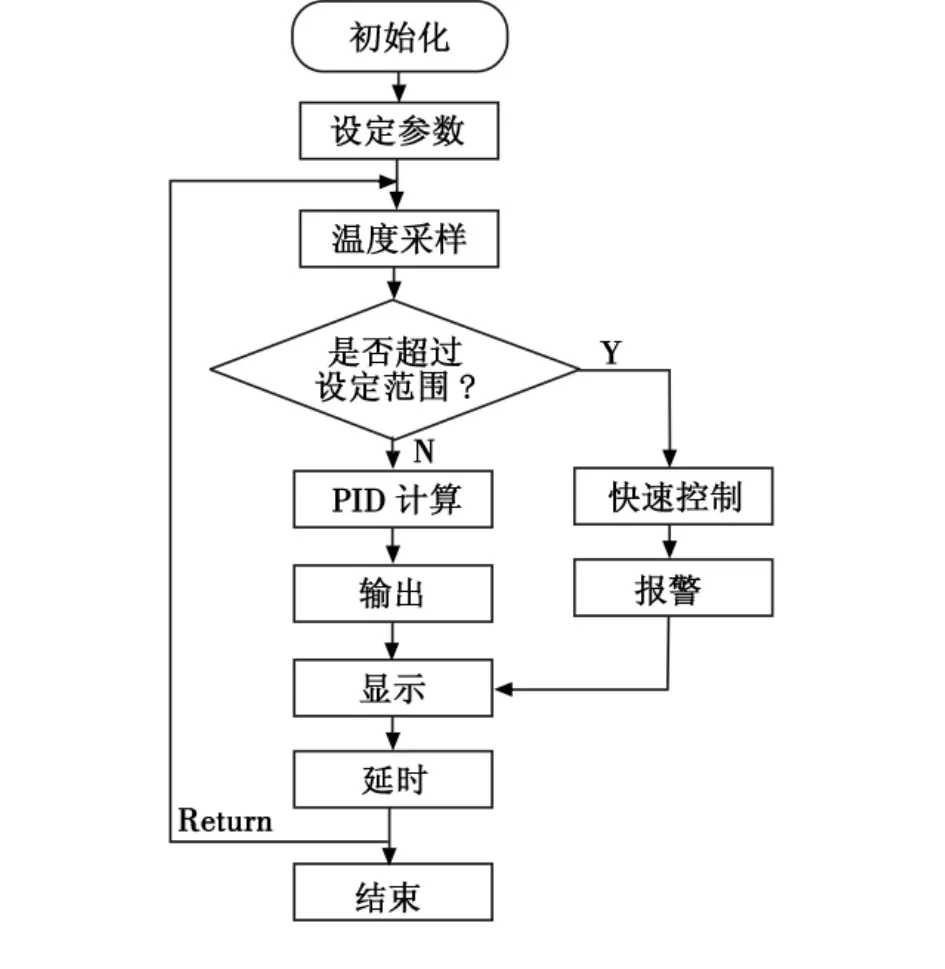
图6 软件流程图Fig.6 Software flow chart
3.2 软件仿真
用单片机配套的仿真平台,只能看每个寄存器的值是否正确,这一步完成之后,有必要看一下系统全速运行时是什么效果。这一步通常在目标板上进行,但是为了排除目标板上可能存在的问题,单纯看软件是否正确,就可以用PROTEUS这个软件。该软件是一个从概念产品到设计完成的完整电子设计工具,组合了高级原理布图、混合模式仿真、PCB设计、自动布线等。
选定单片机后,只要把通过编译的程序导入,就可以在示波器窗口看到波形,可以任意改变输入,看波形的变化是否正确。图7是各种情况单片机输出波形。
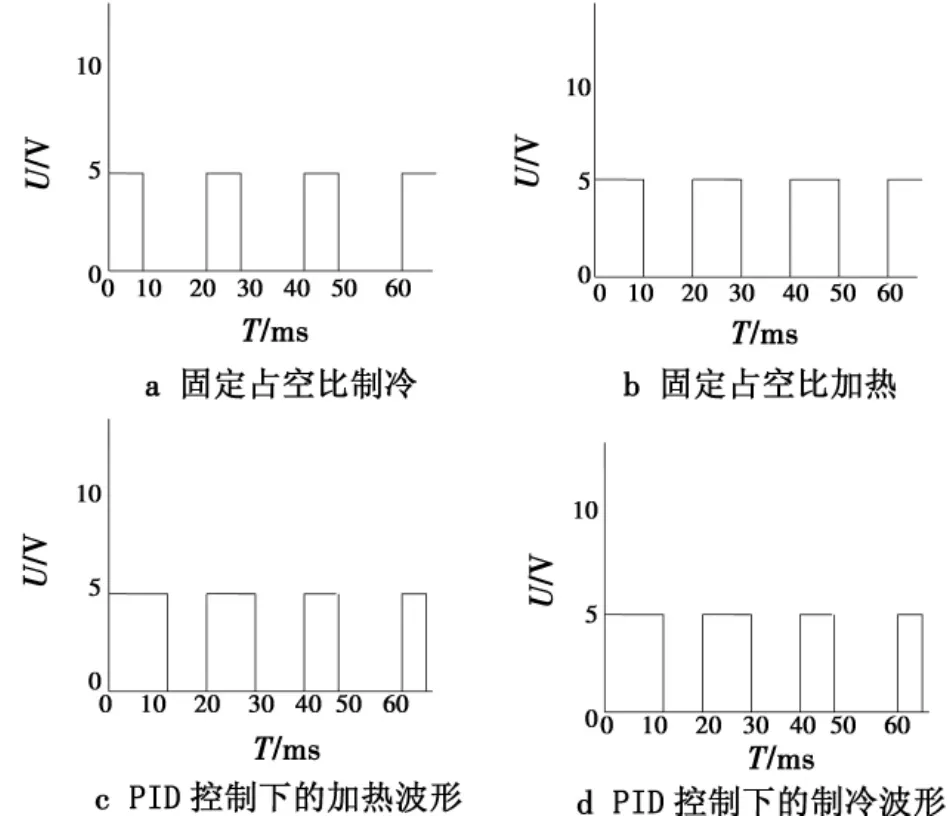
图7 单片机输出波形Fig.7 Waveform of singlechip output
4 实验结果
本设计在某型号激光辐射器中进行高低温试验时,由于散热条件限制以及采用了高温阵列,该阵列在45~60℃基本能输出稳定的波长。所以要求在高低温条件下温控范围60℃ ±3℃。试验证明,在常温25℃的条件下,1 min之内可以使LD加热到45℃;在环境为-45℃的条件下,5 min可以把LD阵列加热到43℃;在环境为60℃的条件下,能够控制LD阵列温度为60±1℃,满足设计要求的精度±3℃。
5 结论
在这个系统中,各个参量可以改变,如散热条件改变、LD阵列发热功率改变、温控点改变、TEC供电改变等,在一定范围内,都可以沿用这个硬件及软件设计,只需对软件或硬件进行少许修改。所以,该设计具有一定的通用性。
该系统体积小、精度高、加热/制冷效率高、通用性好,为大功率半导体激光器的温度控制提供了一种良好的解决方案。
[1]文建国,蔡德芳,王石语,等.大功率DPL中激光二极管热负荷及散热技术[J].西安电子科技大学学报,2000(4):463-466.
[2]林志琦,张洋,郎永辉,等.采用半导体激光器自身pn结特性测温的半导体激光器恒温控制[J].发光学报,2009(2):223-227.
[3]KOECHNER W.Solid-tate laser engineering[M].Springer Science+Business Media.Inc,2006.
[4]董亮,王艳,李彩虹.一种小功率开关磁阻电动机驱动系统设计[J].微电机,2009(3):56-59.
[5]李晓波,方玲,朱志华,等.关于新型半导体制冷方法的研究[J].科技资讯,2008,31:8-9.
[6]王晓明.电动机的单片机控制[M].北京:北京航空航天大学出版社,2002.
[7]何信龙.PIC16F87X快速上手[M].北京:清华大学出版社,2002.
[8]张文源,范松,李冬清.基于PLC与模糊PID的步进式加热炉温度控制系统[J].安徽冶金科技职业学院学报,2009(1):27-29,40.
