BLADE刀锋技术详解
2010-06-02翁得河
翁得河
本文结合模拟和实际例子,讲述BLADE的运动校正方法,图像重建的步骤及其目的。最后讨论与临床密切相关的扫描时间问题,同时介绍BLADE的序列的优缺点。
1 数据采集
BLADE刀锋序列,又称为螺旋桨序列PROPELLER[1]。其采集数据方式与TSE序列相似,不同之处在于每次采集数据时,TSE总是在笛卡尔坐标上进行相位和频率编码,如图1所示,每次激发之后,相隔一定行数采集一行k空间数据,总共采集n行数据(n=Turbo Factor,即快速因子);刀锋序列则每次激发后都采集m行k空间中心数据(m=Turbo Factor),且相邻两次数据采集旋转一定角度θ,如图2,旋转的圆心为k空间中心,该角度的计算公式如(1)


式中M为图像分辨率(Base Resolution),BC为覆盖率(BLADE Coverage),由公式可得出,在一定快速因子情况下,旋转角度和BC成反比,即BC越小,旋转角度越大。从图2同时可看出,BLADE采集的相位编码方向随着旋转角度的变化而变化,因此,其FOV永远为圆形,不像笛卡尔坐标下的FOV,可为长方形或者正方形。

除了用类似于TSE序列采集数据外,还可以用基于TGSE(GRASE)的Turboprop[2]序列或者基于EPI序列采集BLADE数据,这两种方法旨在提高扫描速度,但由于需要更加复杂的相位纠正方法,所以在临床上尚未得到广泛应用。
2 运动纠正
BLADE序列在k空间重复采集数据,这些冗余的数据除了用于重建图像增加信噪比外,还可以用来纠正成像物体在扫描过程中的刚性运动,即旋转和平移。
3 旋转校正
图像旋转一定角度,由傅立叶变换原理知,在k空间上也对应地旋转相同角度,且k空间数据的幅值不受平移运动影响,因为图像的平移在k空间上只表现为一定的相位变化,利用这个性质,可以把平移和旋转运动“分离”。图3A和3B模拟了一个旋转运动的情况,图3A是没有旋转的参考图像,图3B是以图像中心为圆心旋转30°后的图像,图3C为图3A变换到k空间后的图像,图3D为图3B对应的k空间图像。为了显示方便,k空间的数据都取自然对数,从图3C和图3D可以看出,图像上旋转的角度,确实与其对应k空间上旋转的角度一致。
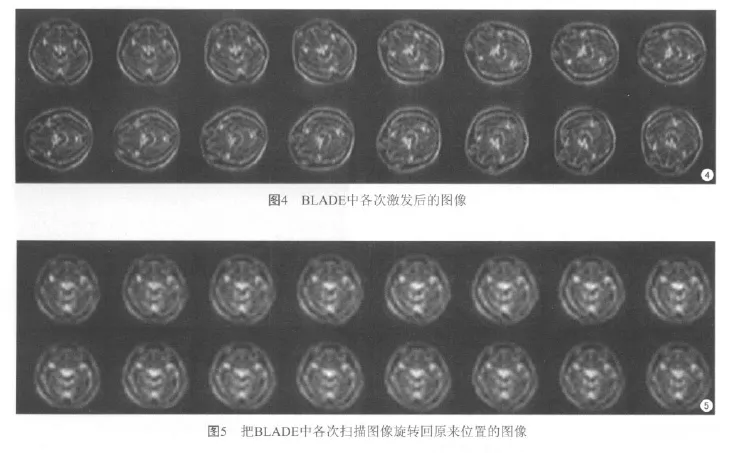
在BLADE序列的运动纠正算法中,首先把各次扫描的数据变换到图像域,得到低分辨率的图像,如图4所示;然后按照序列中规定好的旋转角度,把图像旋转到真实的位置,如图5所示。把旋转后得到的所有图像平均,得到的图像作为参考图像,其他图像与其进行比较后,计算出运动角度。
计算旋转角度的方法大概分为两种:一种为互信息法,即把运动图像旋转一个小角度,求旋转后图像与参考图像的互相关性,在一定角度范围内变换旋转角度求互相关性,最后把相关性最大所对应的旋转角度作为该图像的旋转运动角度。

另外一种为傅立叶-梅林变换法(Fourier-Mellin transform),即对参考图像和运动图像进行傅立叶变换,得到如图3C和图3D类似的k空间图像,然后对k空间图像进行梅林变换。梅林变换实际上是一种坐标变换,把图像从笛卡尔坐标变换到极坐标。k空间在笛卡尔坐标上的旋转,极坐标表现为图像平移。对图像位移的检测,比用互信息法检测旋转更加方便,并可借助傅立叶变换快速求得图像平移量,从而得到旋转角度。
傅立叶变换法求图像位移主要利用傅立叶变换的相位性质,即在图像域上的位移,k空间上表现为沿位移方向均匀变化的相位,相位的大小与位移成正比。
由此,可把梅林变换后的图像再次进行傅立叶变换,用公式(2)求得旋转图像和参考图像k空间相位的互相关函数,如图6所示。检测这个二维函数的最大值所在位置可得两幅图像之间的相对位移,对于刚性旋转而言,只需检测角度方向的位置,并根据位移转换成旋转角度。

式中f()为互相关函数,FFT()为傅立叶变换,angle()为取角度算子,S0、S1分别表示参考图像和旋转图像的傅立叶-梅林变换图像。

4 位移校正
在求得旋转角度之后,可对图像进行旋转校正,校正后的图像只剩下位移。求位移的算法与上述相同,用傅立叶变换求互相关函数。得到旋转和位移参数后,便可对图像进行重建。
5 图像重建
图像的重建主要有三种方法:重排法,直接变换法[3,4]和迭代法,因为直接变换法和迭代法耗时长,尚不能在临床上使用,本文只介绍重排法,首先介绍参考文献[1]的方法。重排法大概步骤如下:
(1)相位纠正:BLADE采集数据时,k空间上旋转的圆心并不总是k空间中心,由此引入了额外误差,假如不做任何纠正,重建后图像有些区域可能出现相位相消而导致信号缺失。对于圆心不在k空间中心的数据片,相当于在k空间上有位移,根据傅立叶变换性质,对应到图像上为增加了沿位移方向线性变化的相位,相位纠正的目的是把这个线性变化的相位剔除。线性变化的相位可近似地由原始数据乘以一个金字塔形滤波器,再变换到图像域获得。把原始数据也变换到图像域,减掉获得的线性变化相位即可完成相位纠正。
(2)密度补偿函数:由于BLADE采集时,k空间填充的密度不一样,中心填充的密度大,越往四周,填充密度越小。所以,重排前,必须对所有数据进行补偿,即根据数据所处k空间位置,计算一个系数乘到数据上。密度补偿函数的计算取决用于重排的窗函数以及数据在k空间的分布,通常的函数为凯瑟贝塞尔窗(Kaiser Bessel window),同时还需考虑数据所对应的旋转运动角度。密度补偿的目的是数据重排后,在笛卡尔坐标上的每个数据点的加权与笛卡尔采集的数据一样都为1。
(3)数据重排:运动纠正后的数据经过相位纠正后,被重新变换到k空间,此时用一定宽度的卷积窗(即一个二维的小矩阵,比如3×3),以每个笛卡尔坐标为中心,求中心周围(在窗宽范围内)数据的加权和,权重为数据对应的密度补偿函数,得到笛卡尔坐标下的重排数据。对数据施加傅立叶变换,得到最终图像。
(4)信号均匀校正:数据重排时对数据进行加窗操作(卷积窗),影响重建后图像亮度的均匀性。由于k空间的卷积操作,相当于图像域上给图像乘上一个加权图。因卷积窗宽有限,所以加权窗并不均匀,而是中间权重大,四周权重小。均匀度校正根据卷积窗,算出相应图像域的加权图,把加权图从重建后的图像除掉,便可得到亮度均匀的图像。
除了以上的重排算法外,还可采用插值法,把k空间数据全部旋转回原来位置后分别进行傅立叶变换,把得到的所有图像相加获得最终图像,称为旋转重建法。该重建法与以上介绍的重排法等效,但因为是图像域相加,固能进一步降低运动伪影。
6 扫描时间及讨论
众所周知,一定分辨率M下,BLADE的扫描时间比TSE的长,TSE和BLADE在快速因子TF一定时所需要的激发次数N可以用公式(3)、(4)表示。

下面通过一个例子,以TSE扫描时间为参考来讨论BLADE扫描时间。假设图像的分辨率为256,Turbo Factor (TF)=29,TR=4秒。对于TSE序列,扫描一幅图像需激发9次,用时36秒。而当Blade Coverage (BC)=100%时,BLADE序列需要激发14次,用时56秒,为TSE时间的1.56倍。由于BLADE对k空间中心重复采集,其信噪比相对TSE高,为了提高成像速度,可减少BC值,如降到64.3%时可达到与TSE一样的扫描时间。利用并行采集也可降低扫描时间。与前面BLADE一样参数,增加加速因子iPAT=2,参考线(Reference line)=8的情况下,等效的TF为52,这时所需激发次数减为8,总扫描时间为32秒。由此可见,在临床扫描时,可以结合BLADE本身的优点,合理设置参数,以获得更好的时间效率。
BLADE除了能纠正刚性运动伪影外,对于非刚性运动,比如腹部成像时的呼吸运动,也有减弱的作用,因为BLADE采集相位编码方向的运动伪影随着编码方向旋转而旋转,不像笛卡尔坐标下的TSE采集,总在一个方向出现,所以重建后得到的图像伪影不如TSE明显,当然图像会或多或少地模糊。旋转重建方法能更好降低非刚性运动对图像的影响,从而得到较好的临床腹部图像(图7)。

BLADE的最大缺点在于扫描层面方向,一般来说,只适合于横断位扫描。矢状面和冠状面扫描只能通过增加相位过采样来避免卷拆伪影(BLADE图像表现为带状伪影),但增加了扫描时间。将来可能的解决方案是采用二维激发方式,只激发层面内特定范围,而不是整个层面。到目前为止,BLADE不能纠正平面间的运动,使其应用受到极大限制,临床扫描时可借助生理信号或者导航信号(PACE功能)等减少运动伪影。
[1]Pipe JG. Motion correction with PROPELLER MRI:application to head motion and free-breathing cardiac imaging. Magn Reson Med, 1999, 42(5):963-969.
[2]Tamhane AA., Arfanakis K. Motion correction in periodically-rotated overlapping parallel lines with enhanced reconstruction (PROPELLER)and turboprop MRI. Magn Reson Med, 2009, 62(1):174-182.
[3]Fessler JA, Sutton BP. Nonuniform fast Fourier transforms using min-max interpolation. IEEE Tran Sign Proc, 2002,51(2):560-574.
[4]Sarty GE., Bennett R, Cox RW. Direct reconstruction of non-Cartesian k-space data using a nonuniform fast Fourier transform. Magn Reson Med, 2001, 45(5):908-915.
