合作目标的飞行器姿态测量方法及其误差补偿模型的建立
2010-02-10赵玉华袁峰丁振良
赵玉华, 袁峰, 丁振良
(1.哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨 150001;
2.哈尔滨理工大学应用科学学院,黑龙江哈尔滨 150080)
0 引言
飞行器三维姿态参数是地面靶场测试实验中反映目标飞行状态的重要运动参数,它对飞行器本身的试验鉴定、工业设计等都有着非常重要的指导意义。光学摄影测量是飞行器外部姿态测量常用的方法。测量原理都是基于相机的透视投影原理,但从其工作方式来看可分为两类:一类是合作目标相对状态测量;另一类是非合作目标相对状态测量[1]。合作目标相对状态测量方式是在目标航天器中设置目标靶,根据目标靶中的特征点的已知位置信息获得相对状态测量值。非合作目标测量不需要目标靶,其测量方法采用立体视觉测量技术、运动图像分析方法等。相比之下,合作目标方法的测量精度高、测量速度快,应用的范围更加广泛[2-4]。
根据测量方法和计算原理的不同,合作目标的结构也各不相同[5];但是以往的合作目标都存在特征点的距离较近,飞行器高速运转时,特征点的位置识别误差将会对最终的测量结果造成很大影响。另外,由于特征点亮度和大小的限制,特征点法的计算精度和可靠性会随着作用距离的增加而急速下降[6-10]。当测量的精度要求进一步提高时,就必须对以上的方法进行改进。为此,本课题组设计一种由4个大功率激光器组成的X形合作目标,并提出一种基于序列图像和视觉测量的屏幕光斑成像法的数学模型。通过在飞行器表面安装带有激光发射装置的合作目标向屏幕上投射激光光斑的方法,将目标的运动姿态变化进行放大,利用实验场内的多方位高速摄像机同时拍摄记录下激光在固定屏幕上产生的光斑位置变化,并对保存下来的光斑序列图像进行分析以确定飞行器的在不同时刻的滚动角、俯仰角、偏航角和位移参数等空间三维姿态参数。该方法避开了飞行器运动过程中因喷火等特性对拍摄图像的影响,同时将飞行器的姿态变化进行有效放大,从而使整体测量精度得到提高。
1 基于合作目标的姿态测量方法
1.1 激光器合作目标
合作目标由4个大功率激光器组成。激光器之间的位置相对固定,每2个激光器分别在空间中共线,发出呈X形的激光指示光束,每条激光束在屏幕上形成一个圆形光斑。激光器的稳压供电芯片和电池组均经过实验测试,可以保证试验中光斑亮度在整个试验过程中基本稳定不变,以减小由于亮度对光斑位置分析的影响。
这种合作目标的形式将特征点从飞行器表面转移到试验场地两侧的投影屏幕上,扩大了特征点的运动范围,提高了对于特征点的识别精度。
1.2 测量系统结构
图1示出飞行器三维姿态测量系统由2个幕墙,4个高速摄像机和安装在飞行器后端的合作目标组成。将飞行器放在2个幕墙之间,合作目标生成的2根双向准直激光束在2个幕墙的表面生成4个指示光斑。在每个幕墙的左右两边各架设1部高速、高分辨率的摄像机。4个摄像机由GPS连续控制,同步拍摄对面幕墙上的指示光斑,并将图像存储在磁盘阵列中,用于后期的分析和处理。通过测量4个指示光斑在空间中的3D坐标来确定飞行器在空间的姿态。
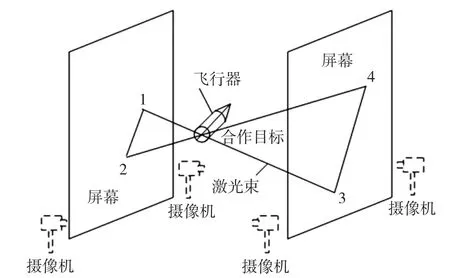
图1 测量系统结构Fig.1 Measuring system structure
2 姿态测量的数学模型
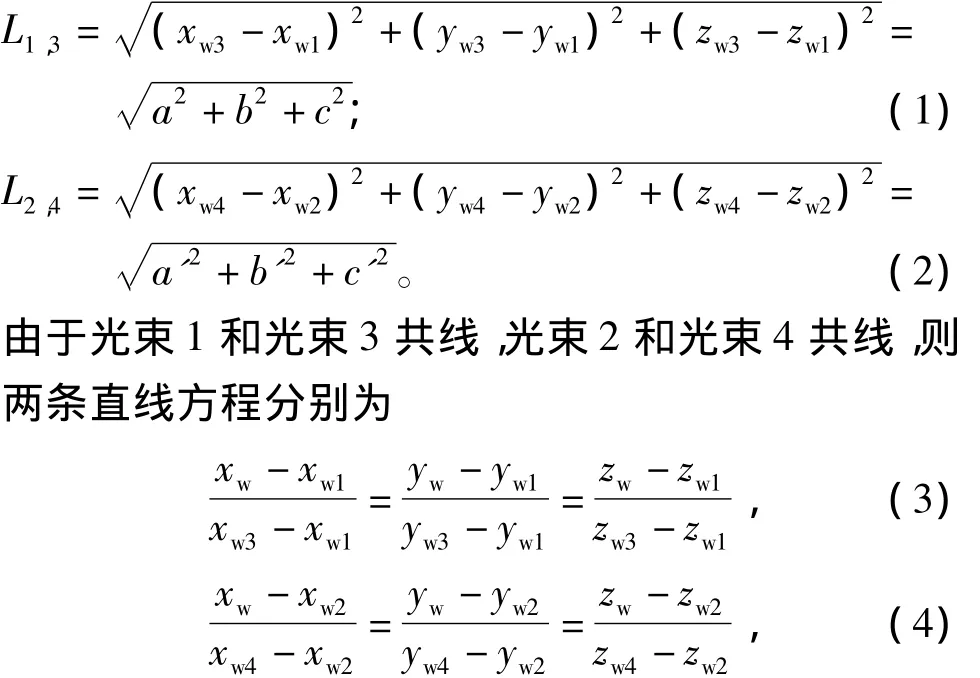
飞行器在屏幕上的4个光斑在世界坐标系中的坐标分别为

其中光束1和光束3共线,光束2和光束4共线。X形的激光之间夹角φ大约25°,可以保证对姿态测量有一定的放大率和测试范围。
定义


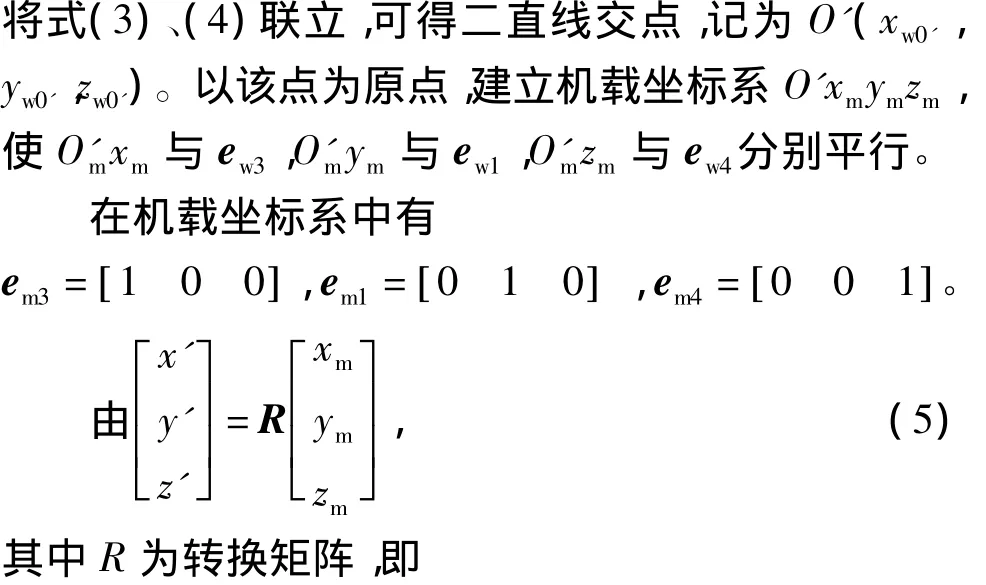
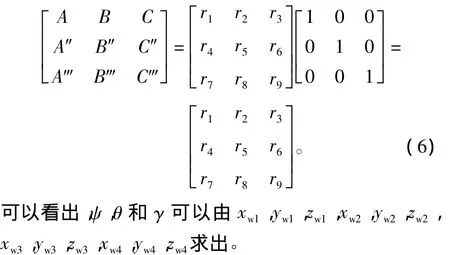
其中3个欧拉角ψ,θ和γ是飞行器的3个姿态角。
由式(5)知
3 系统误差分析和误差补偿模型建立
3.1 系统误差分析
1)来源于激光束的直线度的误差
在建立姿态测量数学模型时,认为合作目标所发出的4条激光束是两两形成一条直线,而在实际制作中,由于加工工艺的影响,其本应在同一直线上的两激光束之间势必会产生一定的夹角(由于激光束较长,两直线间的异面距离可以忽略,即近似的认为两直线在同一平面内),这个夹角对于飞行器的姿态测量结果会造成一定影响。该项误差属于原理误差,可以建立相应的模型进行补偿。
2)来源于激光器光斑形状与亮度误差
该项误差源于光斑的大小因素,形状因素,亮度因素。作为供电电源的锂电池可以保证合作目标形成的像元亮度中心稳定在210灰度值,并持续工作30 min以上,基本满足实验的具体要求。这样,可以将光斑近似的看作亮度恒定,忽略因光斑亮度变化所造成的误差影响。
3)试验用投影屏幕制作误差
由于试验屏幕本身的误差属于系统误差,其分布具有一定的随机性,很难进行合理的补偿,这样,在实际试验时,采用的理想平面是通过激光跟踪仪对屏幕进行扫描后拟合而成,是一个虚拟的平面。
4)屏幕拟合误差
激光跟踪仪所使用的软件是一款功能强大的采用可跟踪计量学的3D绘图软件。本试验中,激光跟踪仪用来测量和标定实验场地内的投影屏幕。用激光跟踪仪对投影屏幕进行扫描,然后用工程应用测量软件SA(Spatial analyzer)最小二乘法拟合出一个理想屏幕。拟合时引入了拟合误差。相应的不确定度可以通过A类方法评定。
5)光学成像系统标定误差
该项误差包括标定点的位置误差和计算误差,摄像机的标定算法误差。在实际的标定过程中,需要严格控制周围杂散光对标定点的影响,以保证图像的高信噪比。相应的不确定度可以通过A类方法评定。
3.2 误差补偿模型建立
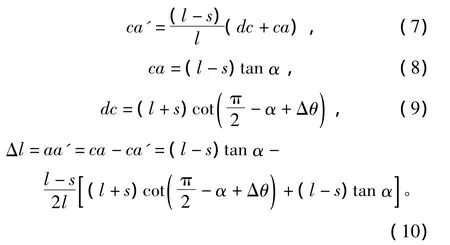
如前所述,合作目标所发出的4条激光束其在同一直线上的两激光束之间会产生一定的夹角,对飞行器的姿态测量结果会造成一定影响。下面就对两光束的重合度误差所造成的影响进行分析。
图2中l为两屏幕间距离,s为飞行器的回转中心距左屏幕的距离(即飞行器在屏幕之间的位置),Δθ为两激光束之间的夹角,a和b是两激光束在屏上所呈现的光斑,a'和b'是光斑的理想位置。由图2可以看出aa'和bb'是由于两激光束不共线在Oxz平面内x方向产生的位置误差,且aa'和bb'相等,因此只需求其中一个。
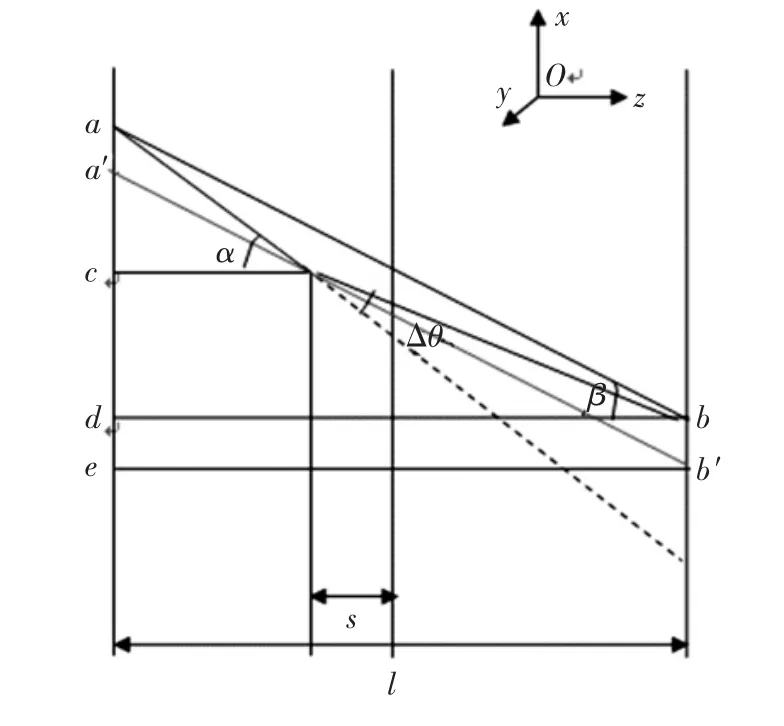
图2 激光束的重合度误差对像点位置的影响Fig.2 Effect of coincidence error of laser beams on light-spot position
由图2中可以看出
建立误差补偿模型后,将试验测得的光斑位置坐标进行补偿,再代入姿态测量数学模型中进行计算,可以有效地减小测量误差。
4 模拟试验
4.1 系统设计指标和要求
试验所用屏幕面积8 m×6 m,两屏幕间距离为13.5 m;两平行屏幕飞行器合作目标直线度误差为4.6',摄像机的像素为1280 ×1024。
将三轴电控测试转台摆放在两个平行幕墙的中间,然后把合作目标安装在转台的工作台上,由合作目标生成的两根双向准直激光束在两个幕墙上生成4个指示光斑。
4.2 试验步骤
1)使三轴电控测试转台3个转轴归零位,此时测试转台的3个轴互相垂直,使用Laser Tracker Xi激光跟踪仪和CAM2 Measure X测量软件建立一个与转台基座相固连,坐标轴分别平行于测试转台的3个转轴的台体坐标系(机载坐标系)。
2)用转台控制器测试转台的各转轴相对于台体坐标系转动指定的角度,以该角度作为姿态角变化量的基准值,验证姿态角测量的精度。
3)三轴电控测试转台带动合作目标产生偏转、俯仰、滚转运动。
4)将试验测得的光斑位置坐标进行补偿。光斑位置误差与飞行器距离场点中心的距离关系,光斑位置误差与入射角之间的关系如图3所示。再代入姿态测量数学模型中进行计算,并与基准值作比较,确定姿态角的测量误差(见表1)。
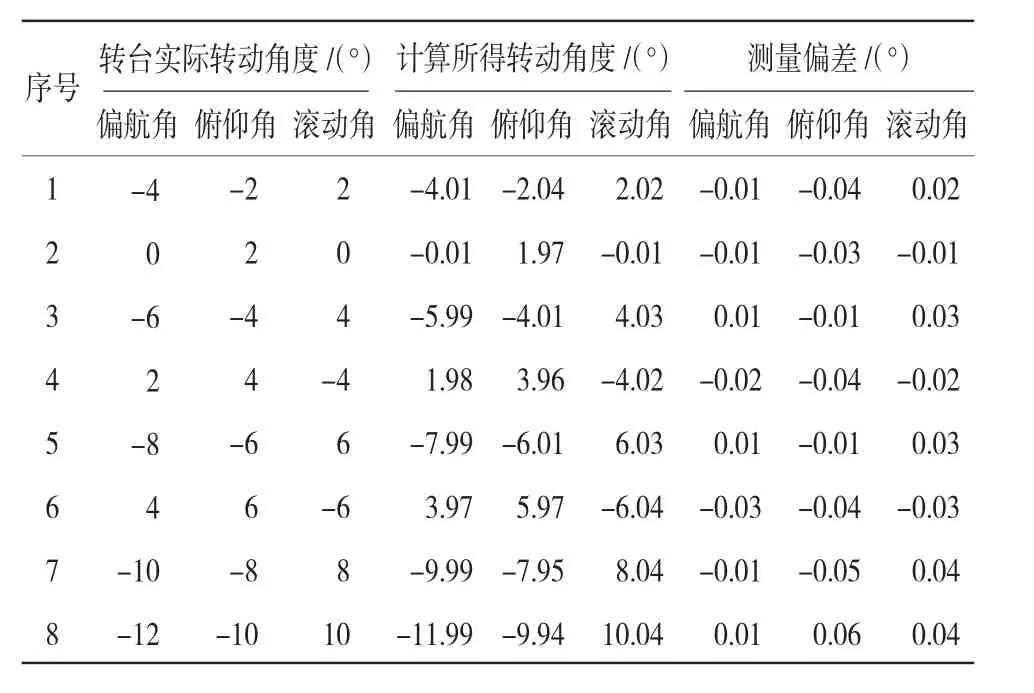
表1 测量值与基准值比较表Table 1 Comparison between measured values and reference values
5 结论
1)X形的合作目标扩大了特征点的运动范围,提高了对特征点的识别精度。姿态测量的数学模型形式简洁,3个姿态角由4个光斑的坐标决定。
2)各姿态角中,俯仰角的测量误差最大,这是由于受激光器合作目标的安装设计的影响,俯仰角运动的相对放大最小。
3)量化由激光束的直线度带来的误差,并对其进行合理的补偿,提高了算法的精度。试验表明,在一定转动范围内(±10°),测量系统最大误差为3.6',达到了设计要求。
4)转台仿真方法虽然可以较好的完成飞行器姿态的模拟,但由于其本身无法形成气体流场,对于气体射流所造成的误差和误差补偿都无法估计,这方面误差还需其他方式进行测量。
[1]杜小平.航天器间相对状态光学测量理论方法研究[D].北京:北京理工大学,2004.
[2]ABIDI M A.CHANDRA T.A new efficient and direct solution for pose estimation using quadrangular targets:algorithm and evaluation[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1995(5):534-539.
[3]吕日好,赵长寿,杨中文.空间目标姿态角测量计算方法研
究[J].仪器仪表学报,2006,27(6):1211-1212.LÜ Rihao,ZHAO Changshou,YANG Zhongwen.Research on computational method for extended target posture angle[J].Chinese Journal of Scientific Instrument,2006,27(6):1211-1212.
[4]LIU M L,WON G K H.Pose estimation using four corresponding points[J].Pattern Recognition Letters,1999,20(1):69-74.
[5]李沛,罗武胜,李冠章.一种基于双目视觉原理的飞机尾旋运动姿态测量方法[J].国防科技大学学报,2008,30(2):107-112.
LI Pei,LUO Wusheng,LI Guanzhang.Spin attitude measure based on stereo vision[J].Journal of National University of Defense Technology,2008,30(2):107-112.
[6]杜小平,曾德贤.基于目标特征的航天器相对状态测量方法误差分析[J].装备指挥技术学院学报,2006,17(5):69-73.
DU Xiaoping,ZENG Dexian.Error analysis of the method for the spacecraft relative state measure based on target feature[J].Journal of the Academy of Equipment Command&Technology,2006,17(5):69-73.
[7]仲小清,霍炬,杨明,等.基于特征光点单坐标系坐标的运动目标相对位置姿态光学测量方法[J].宇航学报,2008,29(6):2001-2008.
ZHONG Xiaoqing,HUO Ju,YANG Ming,et al.Method for relative attitude and position measurement of moving target based on coordinates of reference points in single coordinate system[J].Journal of Astronautics,2008,29(6):2001-2008.
[8]尚洋,于起峰.基于视觉抗扰动测量空间目标位置姿态[J].宇航学报,2008,29(3):938-944.
SHANG Yang,YU Qifeng. Vision-based disturbance-rejecting methods for space targets pose measurements[J].Journal of Astronautics,2008,29(3):938-944.
[9]徐刚峰,李腌,沈振康.自主交会对接中运动参数的测量[J].系统工程与电子技术,2004,26(10):1500-1502.
XU Gangfeng,LI Yan,SHEN Zhenkang.Measurement of motion parameters in RVD[J].Systems Engineering and Electronics,2004,26(10):1500-1502.
[10]张世杰,曹喜滨,陈雪芹.航天器相对位姿参数光学测量解析算法[J].航空学报,2005,26(2):214-215.
ZHANG Shijie,CAO Xibin,CHEN Xueqin.Closed-form method for relative pose parameters of spacecraft based on optical measurement[J].Acta Aeronautica et Astronautica Sinica,2005,26(2):214-215.
(编辑:张静)
