基于虚拟现实技术的安全文明及应急处置能力测试场景构建与实现
2025-02-20耿威吴笛薛栋吉陈鑫马静洁




关键词:安全文明驾驶,应急处置,典型驾驶场景,仿真考核系统
DOI编码:10.3969/j.issn.1002-5944.2025.03.033
0 引言
随着汽车保有量的不断增加,道路交通安全问题日益凸显。新驾驶人安全文明驾驶、应急处置能力存在明显不足,无法达到安全行驶的要求,由此引发的交通安全问题日益凸显。目前驾驶人驾驶技能考试通过实物模拟方考核,成本高、效果单一,科目三安全文明驾驶常识考试,以文字或静态图片形式展示交通场景,难以起到准确评价安全驾驶和应急处置水平的目的。虚拟现实技术因其不受场地限制,能够灵活构建与真实驾驶环境非常接近的虚拟驾驶环境,可对各类道路环境、典型突发情景进行无风险的仿真,很好地解决上述实物模拟高成本、信息展示形式单一等问题,能够在一定程度提升驾驶人安全文明驾驶和应急处置能力,完善目前机动车驾驶人考试的考核评价效果,从源头完善新驾驶人考核方式方法,提升通行安全和通行效率。本文旨在探讨基于虚拟现实技术的安全文明驾驶及应急处置能力测试场景构建和系统研究,以提高驾驶人的应急处置能力和安全驾驶水平。通过我国典型交通事故、交通违法行为分析提取特征要素,集成驾驶人相关法规标准、道路类型、道路环境、交通参与类型等多维数据、多维行为构建典型道路动态交通场景库,形成适用于驾驶人驾驶安全意识和应急处置能力考核仿真考核评价系统。
1 典型场景特征研究
本文基于我国近年来道路交通事故和违法行为数据分析,从人-车-路-环境、违法行为诱因、交通对象参与类型等维度梳理凝练交通事故和违法行为特征要素[1],分析各要素与事故风险程度、违法行为的关系,挖掘各要素间关联规则,梳理适用于安全文明驾驶考核的典型道路驾驶情景。
1.1 交通事故特征
1.1.1 一般道路交通事故特征分析
一般道路交通事故高发时段通常集中在早晚高峰及节假日,特别是恶劣天气条件下,如雨、雪、雾等,道路滑湿、能见度低,易造成刹车失效或偏离车道。其次,事故多发生在交通复杂的路段,如交叉口、急弯和匝道,这些地方视距差、车速较快,容易导致碰撞;特别是在山区道路,由于道路弯道较多、坡度陡峭、视距差,易因操作失误导致翻车、碰撞等严重事故。本文从事故原因、事故形态、事故道路类型、事故地形条件、事故道路时间、天气条件[2]等方面梳理一般道路交通事故典型特征要素,如表1所示。
1.1.2 高速公路道路交通事故特征分析
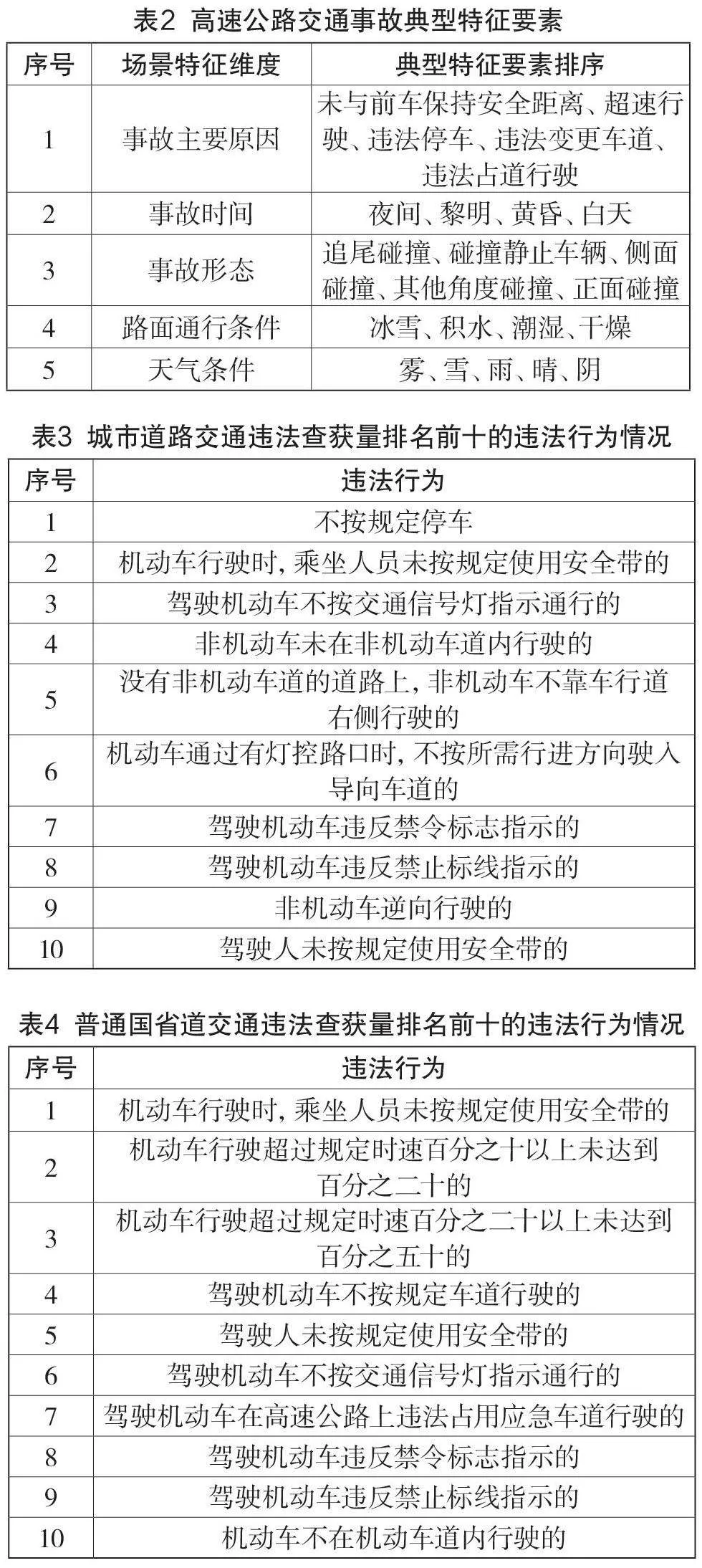
高速公路交通事故发生的时间通常集中在早高峰和晚高峰时段,特别是在节假日或恶劣天气条件下,交通流量大、驾驶人疲劳驾驶的情况较为严重。其次,事故的高发区域多位于车速较快、路况复杂的路段,如匝道、桥梁和隧道附近。此外,车辆碰撞是最常见的事故类型,尤其是rear-end(追尾)和侧撞事故较为频繁,原因往往与驾驶人分心、超速、不遵守交通规则等行为密切相关。天气因素、道路状况(如道路湿滑、视距不清)以及驾驶人的操作失误也是主要的事故诱因。从事故发生原因、事故形态、事故时间、事故道路情况、事故道路天气条件等方面梳理高速公路交通事故典型特征要素,如表2所示。
1.2 交通违法行为特征
道路交通违法行为并不必然引发交通事故,但任何交通事故都是以交通违法行为的存在为前提的。基于交通违法情景所构建的考试场景更具普遍性和广泛性,可以说它是交通事故场景的一个扩展集,涵盖了更多潜在的危害性场景,能够更加完备地对驾驶人安全文明驾驶和应急处置能力进行考试提升[3]。
1.2.1 城市道路交通违法特征分析
城市道路交通违法行为主要表现为驾驶人在复杂的城市环境中不遵守交通规则。常见的违法行为包括:闯红灯,驾驶人为了节省时间忽视红灯信号;不按车道行驶,部分驾驶人随意变道、超车,增加了发生碰撞的风险;在拥堵路段或小巷中逆向行驶;违法停车,占用盲道、消防通道或人行道;在行驶过程中使用手机,分散注意力,增加事故概率;通过人行横道未减速慢行等。城市道路交通行驶常见的违法行为情况如表3所示。
1.2.2 国省道、高速公路道路交通违法特征分析
国省道、高速公路上超速驾驶是最常见的违法行为,许多驾驶人在国省道、高速公路上因车速过快而忽视限速规定,特别是在视距良好、交通流畅的情况下,超速行驶大大增加了事故的发生风险。其次,高速公路中不按车道行驶也较为突出,部分驾驶人在车流密集时频繁变道、超车或占用应急车道,导致交通混乱并增加了碰撞的概率。疲劳驾驶在长途行驶中尤为严重,驾驶人长时间未休息导致注意力不集中,反应迟钝,易引发与其他车辆碰撞。国省道、高速公路道路交通行驶常见的违法行为情况如表4所示。
2 典型道路驾驶仿真场景构建
基于上述分析的道路交通事故与违法行为特征要素,融合我国典型道路环境、道路类型、天气及光照条件和交通流环境等多源模式不同驾驶场景需求,依据我国道路交通法律法规、标准规范等规定的通行规则及安全文明驾驶要求,设计构建了多种可用于驾驶安全文明和应急处置能力考核的道路驾驶仿真场景。
2.1 驾驶安全文明测试场景
2.1.1 主辅路路口行驶
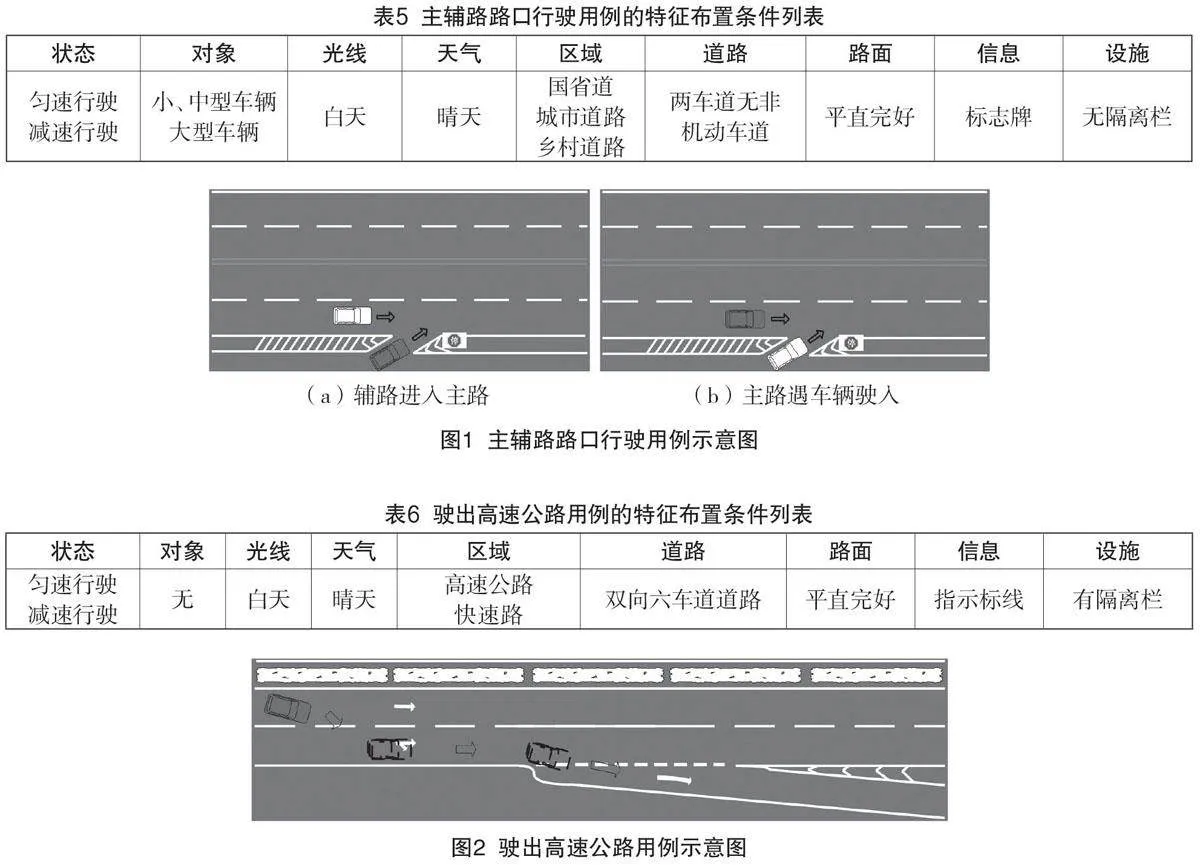
主辅路交叉口行驶时,主路车辆优先通行,辅路车辆需减速并观察交通标志或信号灯。在无交通信号灯的交叉口,辅路车辆应遵守“让行”或“停车”标志的指示,确保安全通过。转弯时,驾驶人需提前打转向灯,并按规定车道行驶。遵守交通规则和信号灯指示,确保通行顺畅并避免交通事故。驾驶人应注意观察其他车辆和行人,保持安全车距,特别是在繁忙或视线不佳的路。用例特征布置如表5所示,用例示意图如图1所示。
2.1.2 驶出高速公路
驶出高速公路时,驾驶人应提前注意出口标志,确保提前变道。进入减速车道时,逐渐降低车速,避免急刹车。离开高速公路前,应确保转向灯开启,避免与其他车辆发生冲突。用例特征布置如表6所示,用例示意图如图2所示。
2.1.3 无信号灯路口通行
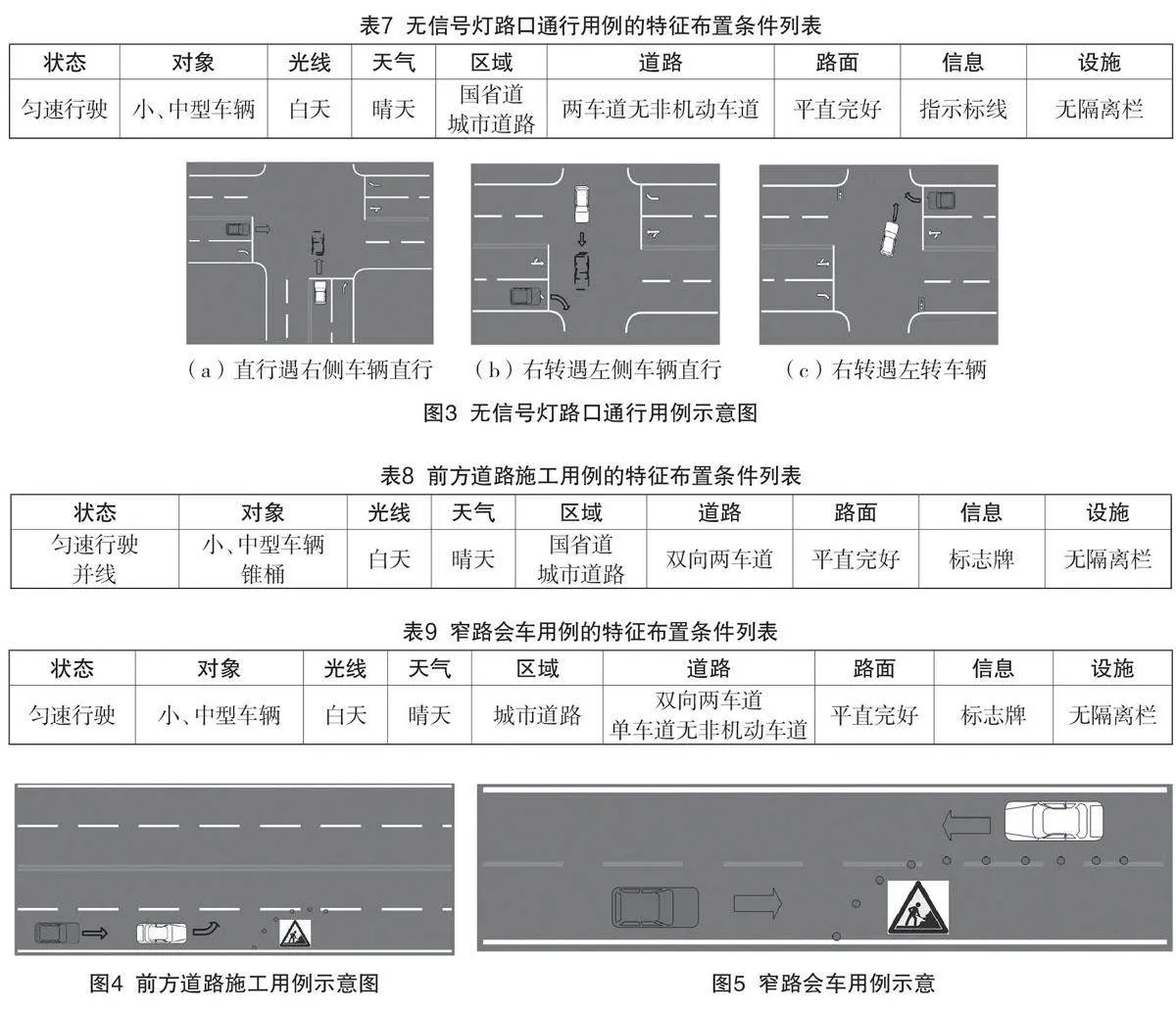
在无信号灯路口通行时,驾驶人应根据交通标志、标线和路况合理判断通行顺序,确保安全。遇到“停止”或“让行”标志时,驾驶人必须提前减速、停车并观察四周,确认无其他车辆或行人时方可通行。对于没有信号灯的交叉口,若主路和辅路交汇,主路车辆享有优先通行权,辅路车辆需遵守让行规定,待主路车辆通过后再行驶。用例特征布置如表7所示,用例示意图如图3所示。
2.1.4 前方道路施工
应及时观察施工区域,采取向左车道并线通过该区域的处理方式;遇有左侧车道存在其他车辆行驶时,车辆应减速避让,待其他车辆通过后,开启左转向灯,向左侧车道并线,通过临时施工路段。用例特征布置如表8所示,用例示意图如图4所示。
2.1.5 窄路会车
正确判断会车地点,会车有危险时,控制车速,提前避让,调整会车地点,会车时与对方车辆保持安全间距。在没有中心隔离设施或者没有中心线但能同时通行的路段上会车时,应提前控制车速减速靠右行驶,并与其他车辆、行人保持必要的安全距离;在无法同时通行或同时通行有危险的路段上时,一是在有障碍的路段,无障碍的一方先行,但有障碍的一方已驶入障碍路段而无障碍的一方未驶入时有障碍的一方先行;二是在狭窄的坡路,上坡的一方先行,但下坡的一方已行至中途而上坡的一方未上坡时下坡的一方先行;三是在狭窄的山路,不靠山体的一方先行。用例特征布置如表9所示,用例示意图如图5所示。
2.2 应急处置能力测试场景
2.2.1 超越前方车辆
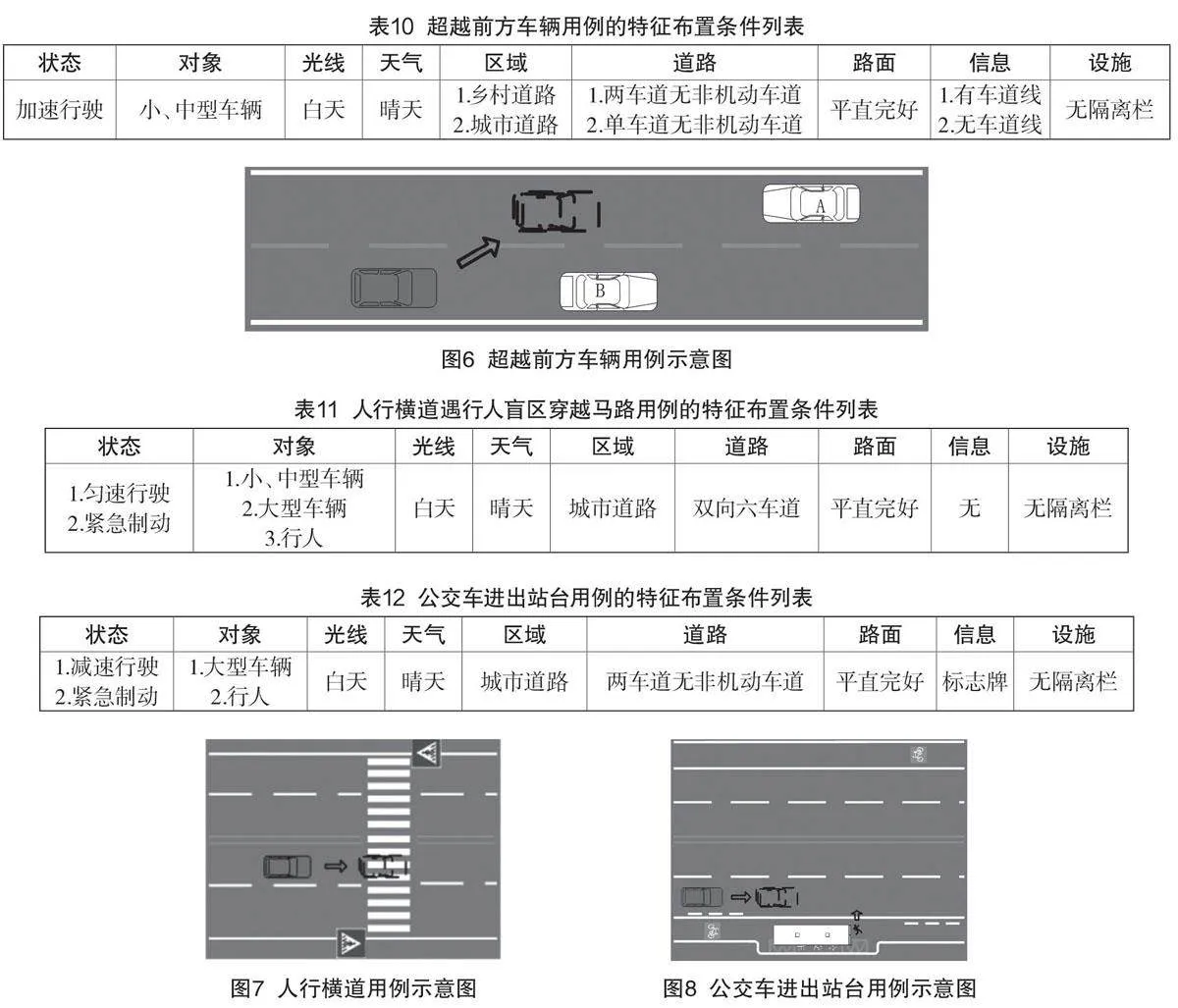
机动车超车时,应当提前开启左转向灯、变换使用远、近光灯或鸣喇叭。在没有道路中心线或者同方向只有1条机动车道的道路上,在确认有充足的安全距离后,从前车的左侧超越,在与被超车辆拉开必要的安全距离后,开启右转向灯,驶回原车道。用例特征布置如表10所示,用例示意图如图6所示。
2.2.2 人行横道遇行人盲区穿越马路
驶抵人行横道线前减速,驾驶人应减速并提前观察,特别注意盲区,确保视线清晰没有行人正在或准备横穿马路。遇行人在人行横道行走时,拥有优先通行权,应停车让行,直至行人安全通过。用例特征布置如表11所示,用例示意图如图7所示。
2.2.3 公交车进出站台
驶抵公共汽车站前减速,观察公共汽车进、出站动态和乘客上下车动态,着重注意同向公共汽车前方或对向公共汽车后方有无行人横穿道路。
有公交车出入站台时,采取减速措施平稳通过公交车站区域。准确观察有公交车辆停靠公交车站,提取降低车辆行驶速度,待行人通过后,车辆直线通行。用例特征布置如表12所示,用例示意图如图8所示。
2.2.4 急弯山区路(临水、临崖、急弯破路)
在急弯山区路(临水、临崖、急弯破路)行驶时,注意观察道路变化,急弯路段要保持低俗或提前减速,避免急刹车或急转弯,确保操控稳定。遇对向有车驶来时,减速向右避让后,让不靠山体的一方车辆先行通过后,再有序通过,用例特征布置如表13所示。
2.2.5 突发团雾驾行驶行驶
时遇突发团雾路段,应降低车速,保持安全车距,避免急刹车或突然加速。开启雾灯和近光灯,避免使用远光灯造成反射。尽量依靠道路标线或车道线行驶,避免频繁变道。用例特征布置如表14所示。
3 驾驶场景仿真测试评价系统实现
3.1 驾驶座舱系统
本文采用真实的汽车驾驶舱设计,包括方向盘、油门、刹车、离合器等控制部件,使得驾驶人在模拟环境中的驾驶体验与真实环境相似[4]。驾驶座舱如图9所示,除基础结构外,驾驶座舱主要集成以下3种模块:①检测模块,用于检测驾驶人的操作动作,如转向盘转动角度、刹车力度等;②反馈模块,提供行车环境实时反馈,如车辆加速、刹车、转向等动作,使驾驶人能够感受到虚拟环境中的车辆运动,反馈模块包括振动反馈器、声音反馈器等,用于模拟真实的车辆运动状态。③传感器模块,包括各种传感器,如加速度传感器、角度传感器等,用于采集驾驶人的操作命令和车辆的运动状态并将数据进行结构化处理后输出至评价模块进行处理和分析。
3.2 驾驶视景系统
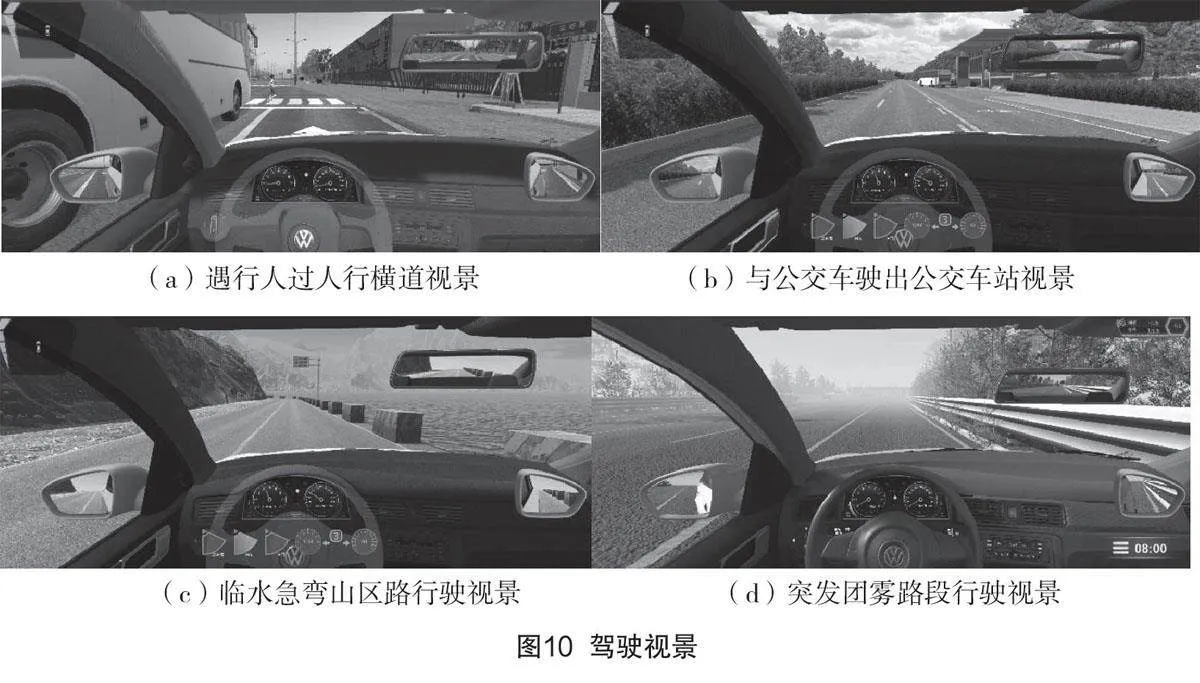
虚拟驾驶环境的构建是测试场景的基础。本文基于Unity3D技术对交通环境进行三维建模,根据真实道路数据,构建包括高速公路、城市道路、乡村小路等不同类型的道路,包含相应的道路标志、信号灯、交通标志线等以模拟真实的驾驶环境。针对道路交通参与者,通过程序的脚本和动画系统,模拟其他车辆和行人的行为,支持手动设置运动轨迹与触发条件,以及基于AI控制的交互模式。针对天气条件模拟,使用引擎的着色器和光照系统,调整虚拟环境中的光照、阴影、反射等效果,模拟晴天、雨天、雪天等不同的天气状况,从而增加驾驶环境的真实感。模拟驾驶时,仿真模拟车辆运行前方道路交通视景,内后视镜显示车辆后方交通视景,两侧外后视镜显示汽车相应侧后方道路交通视景。车辆运行所在的道路交通驾驶场景与驾驶前方视景、内、外后视镜显示观察视景图像关联同步,如图10所示。
3.3 数据交互组件
在虚拟驾驶环境中,驾驶人需要与虚拟环境进行交互。因此,设计合理的交互逻辑和反馈机制至关重要。在车辆控制逻辑方面,系统基于高精度车辆动力学模型,对车辆加速、刹车、转向等动作进行精准控制,模拟真实车辆的物理特性,以确保驾驶人在虚拟环境中的驾驶体验与真实环境相似[5]。在环境反馈方面,系统通过集成视觉、听觉和触觉等多种传感器,尽可能模拟实际场景的多源输入,如:当车辆发生碰撞时,可以通过声音和振动来提醒驾驶人;当车辆偏离车道时,可以通过视觉提示来引导驾驶人。在数据采集与分析方面,通过整合Unity3D的传感器模拟和物理引擎以及实体操作部件状态,提取驾驶人的驾驶行为数据,如车速、加速度、刹车力度等,根据驾驶人在应急处置能力测试场景中的操作表现,评价其安全驾驶和应急反应能力[6]。
3.4 驾驶能力测试评价系统
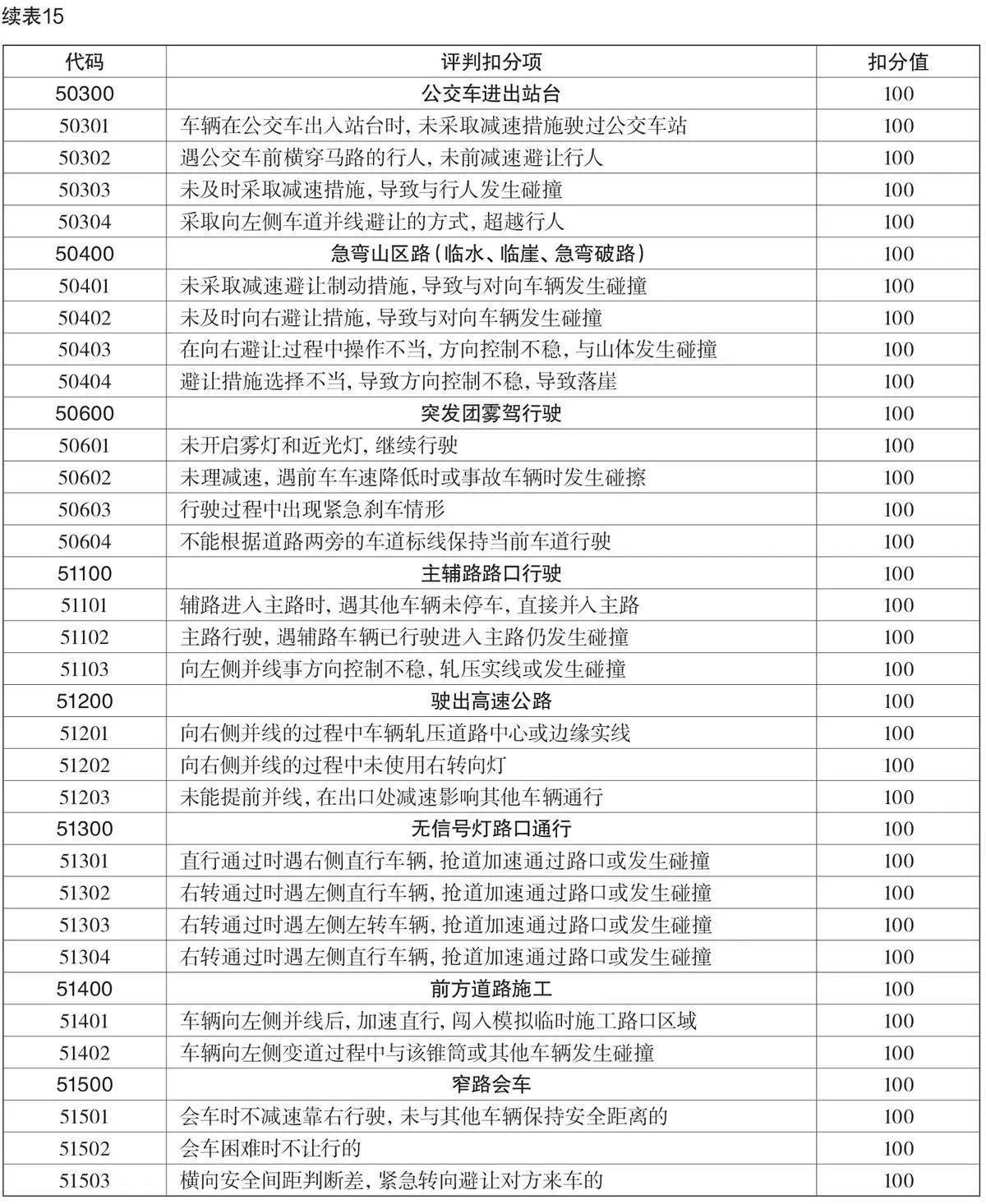
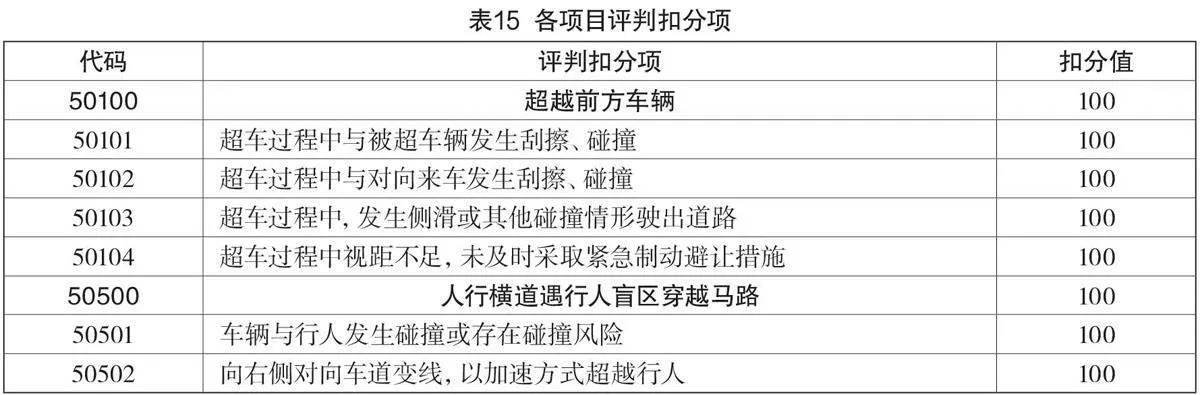
基于道路通行规则及安全文明驾驶要求,借鉴我国机动车驾驶人考试管理制度以及考试项目、方法和评判要求,构建基于虚拟现实技术的安全文明及应急处置能力测试评价系统。系统通过采集驾驶人驾驶过程视景和驾驶行为数据,包括车辆运动特征信息、操作行为特征信息、场景特征信息、错误驾驶操作等信息[7],能对超越前方车辆、通过人行横道、通过公共汽车站、急弯山区路行驶、行驶中遇突发团雾、行驶中遇前车紧急刹车、主辅路路口行驶、驶出高速公路、无信号灯路口通行、道路施工通行、窄路会车等安全文明及应急处置道路驾驶仿真场景中的驾驶行为进行综合评价[8],各项目评判扣分如表15所示。
4 结语
本文基于交通事故、违法行为和法律法规分析等多维数据驱动的典型道路驾驶情景构建技术。通过我国典型交通事故、典型交通违法行为分析提取特征要素,集成驾驶人相关法规标准、道路类型、道路环境、交通参与类型等多维数据,创新性构建适用于驾驶人驾驶安全意识和应急处置能力测试仿真场景。依托我国道路通行规则及全文明驾驶要求,形成驾驶人关于安全文明驾驶及应急处置能力的考核评价方法;通过虚拟现实技术动态直观仿真再现复杂道路环境、危险驾驶交通场景,形成典型驾驶场景仿真考核系统,评价驾驶人安全文明及应急处置驾驶能力。
作者简介
耿威,通信作者,硕士,高级工程师,研究方向为驾驶人考试技术与标准化研究。
(责任编辑:袁文静)
