基于FPGA实现的ADS-B信号解码处理
2025-02-13李宝仲广玺




摘要:本文提出了一种基于现场可编程门阵列(FPGA)技术的自动相关监视广播(ADS-B)信号解码方法。该方法的主要功能包括框架脉冲检测、应答信息解码、将应答信息整合成飞机的同步应答组以形成应答报告,以及剔除虚假应答。
关键词:ADS-B系统;框架脉冲检测;FPGA
doi:10.3969/J.ISSN.1672-7274.2025.01.024
中图分类号:TN 911.7 文献标志码:A 文章编码:1672-7274(2025)01-00-04
ADS-B Signal Decoding Processing Based on FPGA Implementation
LI Bao, ZHONG Guangxi
(Nanjing Nriet Industrial Co., Ltd., Nanjing 210013, China)
Abstract: This article proposes a decoding method for Automatic Dependent Surveillance Broadcast (ADS-B) signals based on Field Programmable Gate Array (FPGA) technology. The main functions of this method include: frame pulse detection, decoding of response information, integrating response information into a synchronized response group of the aircraft to form a response report, and eliminating 1 responses.
Keywords: ADS-B system; frame pulse detection; FPGA
ADS-B地面站具备实时接收装备有1090ES发射机的航空器或地面移动单元发出的ADS-B广播信号的能力,能够提供目标的识别信息(包括A代码、S模式地址码)及位置(包括经纬度、高度)、速度等关键数据[1]。该地面站适用于空中交通管制系统,能够进行航路监视,并为空中交通管制部门提供连续且准确的航空管制信息[2]。
本文介绍的ADS-B应答解码系统采用了大容量FPGA设计,系统主要由四个核心部分组成:ADS-B回波的应答头检测、反窄处理、框架检测以及虚假目标去除四部分。基于此,系统生成单次应答回波的点迹信息,便于后续航迹处理完成目标应答的凝聚、航迹滤波等相关的处理,展现出良好的处理实时性和对复杂数据处理能力。
1 方案设计
ADS-B信号解码器的核心功能实现如下:数字中频处理、应答预处理、ADS-B解码处理、全机定时/方位与模式信号的生成以及反窄处理。最终,解码器将包含处理信号的BIT信息的应答报告发送至数据处理分系统。
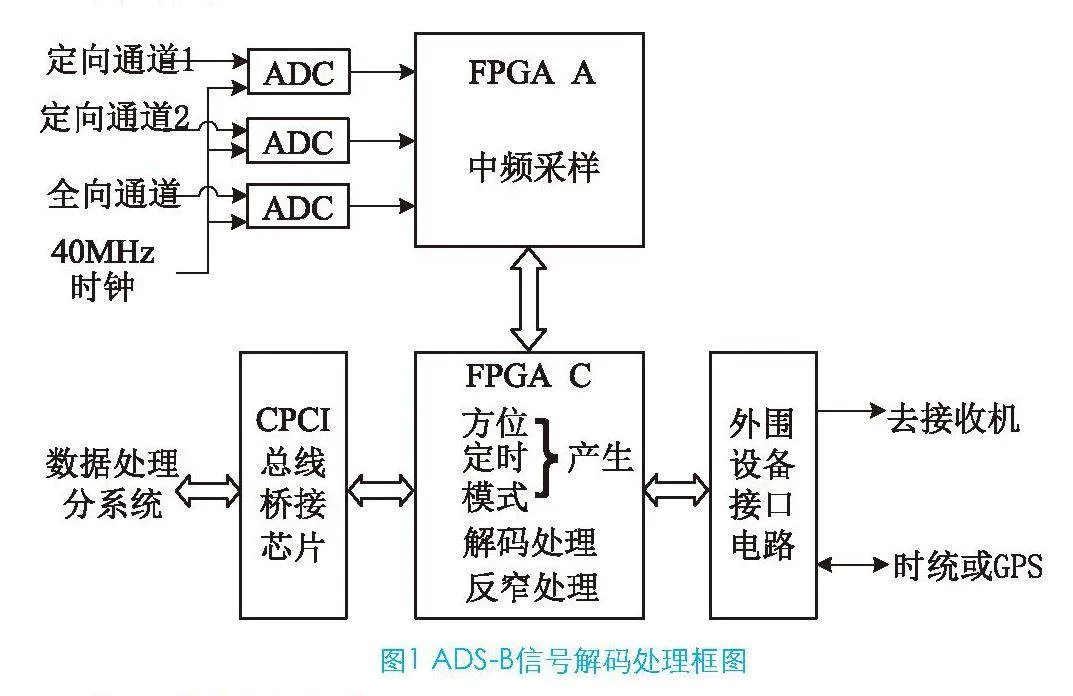
解码模块采用集成化和小型化设计,整个分系统仅由一个基于CPCI总线的6U插件构成,并集成了大规模的FPGA芯片。印制板上安装了三块大规模集成电路FPGA-EP2S60F1020I4,其中FPGA A负责信号的中频采样,而FPGA C则承担方位、定时与模式信号的生成,解码处理以及反窄处理等任务,如图1所示。
2 解码实现
2.1 中频采样
采用80 MHz的时钟频率,对输入的Σ、△、Ω三个通道的60 MHz中频信号进行采样,以生成三个通道的14位I/Q信号。采用AD6645ASQ-80型号的A/D转换器(CADC),其最大采样速率可达105MSPS,能够处理最高200 MHz的中频输入,且中频信号的带宽可达到40 MHz,同时实现75 dB的信噪比(SNR)和89 dB的无杂散动态范围(SFDR),如图2所示。
通-过数字本振(NCO)和乘法器实现混频和正交I/Q解调,再通过数字FIR滤波器进行低通滤波,从而得到基带I/Q信号。接着对Σ、△、Ω三个通道的信号执行求模运算和求对数运算,分别得到三个通道的信号幅度值。
2.2 ADS-B应答头检测
2.2.1 应答信号
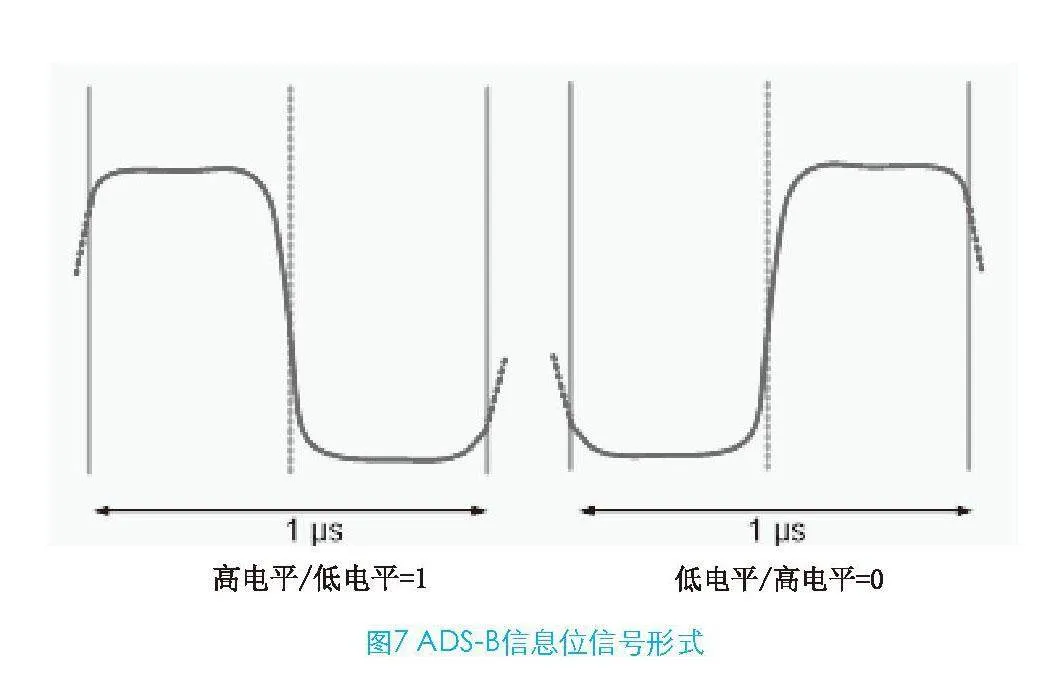
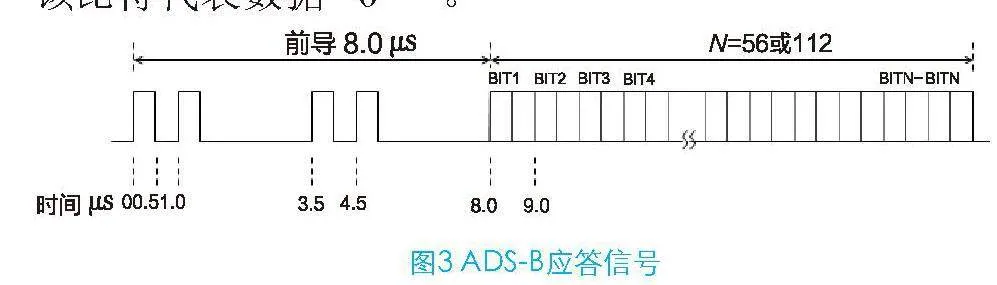
如图3所示,自动相关监视广播(ADS-B)的应答信号的前导部分持续8.0 μs,由四个固定位置的子脉冲构成,每个子脉冲的脉宽为0.5 μs。紧随其后的是时长为112 μs的脉位调制(PPM)数据块,该数据块由112比特组成,每个比特周期为1 μs,每个比特由两个chip组成。在PPM编码中,若前一个chip呈现高电平而后一个chip为低电平,则该比特代表数据“1”;反之,若前一个chip为低电平而后一个chip为高电平,则该比特代表数据“0”[3]。
2.2.2 应答头检测
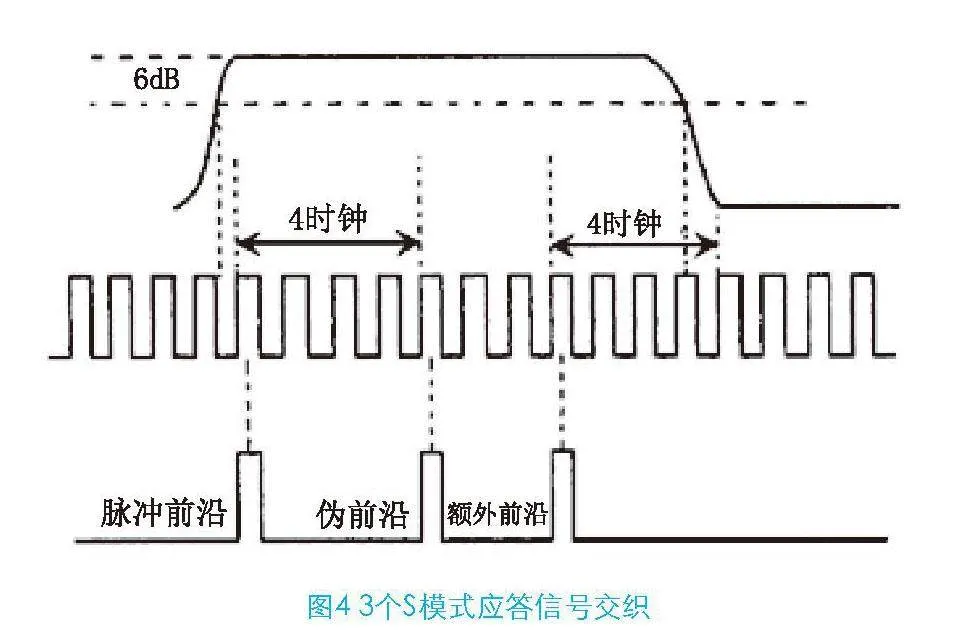
前导脉冲由四个子脉冲构成,因此首要任务是从噪声中识别出有效脉冲。基于噪声基底和脉冲的有效宽度,可以确定:在未达到信号的一段时间窗口内,计算得到的均值为噪声基底;而大于设定门限值且持续时间超过0.3 μs的脉冲则被视为有效脉冲。当信号发生交织时,信号脉冲的宽度会有所增加。通过检测脉冲宽度,可以判断出发生交织的S模式应答信号的数量,并据此生成相应的标志脉冲。假设存在三个S模式的应答信号交织,将会产生三个相应的标志脉冲,如图4所示。
应答处理首先依据通道视频信号执行脉冲检测,以获得PSV(Pulse Start Value)。随后,对PSV信号进行处理,在每个PSV信号的上升沿生成真实的脉冲前沿ALE(Actual Leading Edge)。基于脉冲下降沿的位置,计算第二个脉冲的前沿,即伪前沿PLE(Pseudo Leading Edge)。当脉冲宽度超过两个脉冲宽度时,根据脉冲前沿位置推导出额外的前沿XLE(Xtra Leading Edge)。XLE的位置位于ALE和PLE之间,具体为ALE+i×450 ns,其中i=1,2…。ALE、XLE和PLE共同构成应答的前沿脉冲串LE(Leading Edge)。
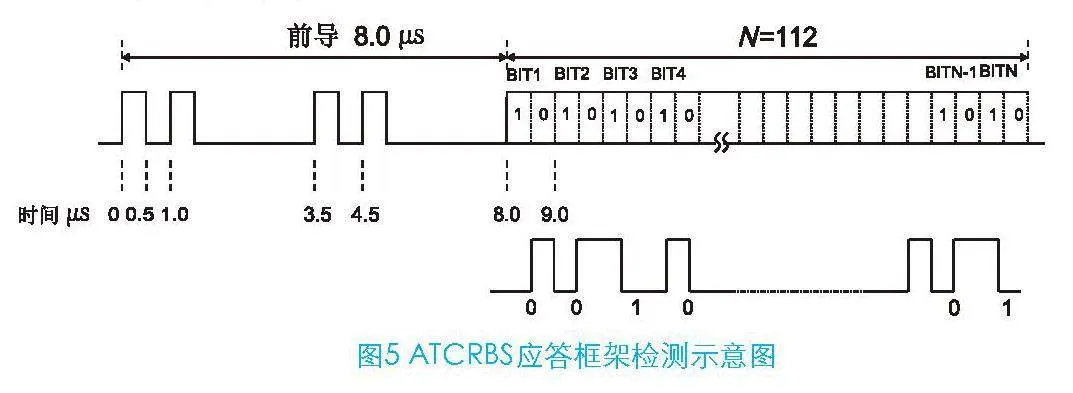
计算前沿脉冲LE的间隔,当四个前沿脉冲的时间间隔分别为1 μs、3.5 μs、4.5 μs时,结合当前的工作模式,可以确定ADS-B应答头的存在。应答头检测过程如图5所示。
S模式应答信号的应答头由四个脉冲构成,其中应答头信号的前沿作为解码应答信息数据的同步信号,而应答头信号的幅度信息则作为应答信息数据的幅度参考值。通过计算这四个前导脉冲的平均幅度,我们得到一个幅度参考基准,后续的112个信息位的幅度将与这个基准值进行比较,从而确定相应位的信息。每个信息位占据1 μs的时间,如果在前0.5 μs内检测到脉冲,则该位信息为“1”;如果在后0.5 μs内检测到脉冲,则该位信息为“0”,具体如图6所示。
最简单的解码方法是对比一个时长为10.5 μs信息位的前0.5 μs与后0.5 μs脉冲的幅度值。若前0.5 μs脉冲的幅度高于后0.5 μs脉冲,则判定该信息位为“1”;反之,则为“0”(见图7)。然而,在存在干扰的情况下,这种解码方式会导致较高的误码率。RTCA DO-260标准推荐了一种改进的解码技术,该技术涉及对每个脉冲进行多次采样,并根据采样值查表确定信息位的逻辑值及其置信度。我们对该方法进行了深入的技术优化,采用RTCA DO-260推荐采样速度的两倍。每次采样后,根据幅度信息赋予特定的权值,将所有权值累加得到一个有符号数的权值和。该有符号数的正值表示逻辑“1”,负值表示逻辑“0”,其绝对值大小则反映了信息位的置信度,如图8所示。
解码过程在六个接收通道中同步进行,同一架飞机的高置信度信息可能会在多个通道中输出。我们对解码过程进行了进一步的改进,特别是在处理交织应答方面。如果一个解码通道在处理应答码时检测到另一个高幅度的应答头,传统处理方式可能会中断当前处理,转而处理高幅度应答头信息的目标。而我们现在的处理方法是,该通道会继续处理当前应答,同时启动第二个解码通道来处理另一个高置信度应答头信息的应答。后检测到的高幅度应答头信息很可能是由多个交织在一起的应答形成的,而不是一个有效的应答。因此,第一个应答继续被处理,通过纠错能力,我们能够得到一个正确的应答信息。
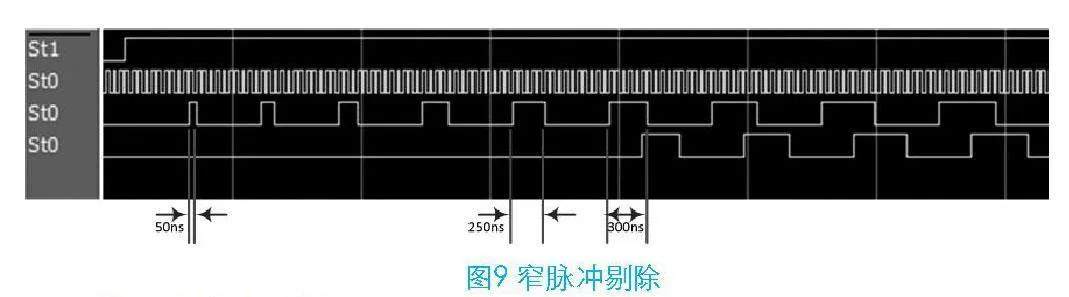
2.3 窄脉冲抑制
窄脉冲抑制在应答信号处理中扮演着关键角色,通过反窄电路滤除0.3 μs以下的脉冲,实现0.3 μs脉冲的反窄,从而抑制各种杂波干扰,降低虚警概率。在实际应用中,询问机在接收应答信号的同时也会接收到外界各种干扰信号,这些干扰信号会影响后端解码的正确性,因此需要对窄脉冲进行剔除。在工程实践中,考虑到低信噪比以及人为或自然干扰带来的脉宽测量误差的影响,信号处理采用滑动窗对应答信号进行分段,并根据窗内信号的幅度设置窗内阈值。通过滑动窗设定的自适应阈值可以得到应答信号对应的应答脉冲。计算脉冲宽度,并对小于0.3 μs的脉冲进行滤除,从而实现对窄脉冲干扰信号的抑制。实际剔除效果如图8所示,图中PSV为询问机接收的应答信号对应的应答脉冲,脉冲宽度分别为0.05 μs、0.1 μs、0.15 μs、0.2 μs、0.25 μs、0.3 μs、0.35 μs、0.4 μs、0.45 μs、
0.5 μs、0.6 μs、0.8 μs。psv_out为窄脉冲剔除后的输出脉冲,前5个宽度小于0.3 μs的窄脉冲已被成功剔除。
3 结束语
在本方案中,接收机负责接收ADS-B下行广播信号,并将其下变频至60 MHz,随后完成中频采样。采样得到的中频数据将被传输至信号处理器,信号处理器执行一系列处理步骤,包括对原始视频脉冲进行反窄带滤波、恒虚警率(CFAR)检测和二值积分等,以生成二分层量化脉冲。接下来,信号处理器进行解码、置信度检测以及码装配等复杂处理,并同步接收来自GPS系统的授时信息。最终,广播信息以数据块的形式被送至情报终端或管制中心进行处理,解码效果如图10所示。■
参考文献
[1] 王强,施红,胡明朗.基于ADS-B飞行安全实时监控及半物理测试平台[J].计算测量与控制,2015(l):27-30.
[2] 杜万营,陈惠萍.ADS-B监视技术在空中交通服务中的应用研究[J].中国民航大学学报,2008(l2):23-26.
[3] 王洪,刘昌忠,汪学刚,等.S模式前导脉冲检测方法[J].电子科技大学学报,2010,39(4):486-489.
作者简介:李 宝(1987—),男,汉族,江苏宝应人,工程师,研究生,研究方向为雷达监视数据发展与政策。
仲广玺(1988—),男,汉族,黑龙江哈尔滨人,高级工程师,本科,研究方向为空管雷达总体技术。
