基于无人机库的自动充电系统研究
2025-02-13熊斌沈伶康姚晓君陆杨文

摘要:随着无人机技术的迅猛发展,其应用范围日益广泛。为满足无人机长时间、大规模作业需求,自动充电系统的研发变得至关重要。本文重点研究基于无人机库的自动充电技术,提出了一套完整的自动充电系统设计方案,并探讨了关键技术的优化与应用。通过实验验证,本文设计的自动充电系统具有较高的稳定性和工作效率,为无人机技术的进一步推广和应用提供了有力支持。
关键词:无人机库;自动充电系统;充电管理;充电优化
doi:10.3969/J.ISSN.1672-7274.2025.01.010
中图分类号:TM 910.6;V 279+.2" " " " " " " " "文献标志码:A" " " " " " 文章编码:1672-7274(2025)01-00-04
Research on Automatic Charging Based on Unmanned Aerial Vehicle Hangar
XIONG Bin, SHEN Lingkang, YAO Xiaojun, LU Yangwen
(Suzhou Suneng Group Co., Ltd. Technology Branch, Suzhou 215000, China)
Abstract: With the rapid development of drone technology, its application scope is becoming increasingly widespread. The development of automatic charging systems has become crucial to meet the long-term and large-scale operational needs of drones. This article focuses on the research of automatic charging technology based on unmanned aerial vehicles, proposes a complete design scheme for automatic charging system, and explores the optimization and application of key technologies. Through experimental verification, the automatic charging system designed in this article has high stability and work efficiency, providing strong support for the further promotion and application of drone technology.
Keywords: unmanned aerial vehicle hangar; automatic charging system; charging management; charging optimization
近年来,无人机技术在物流、农业、航拍等领域得到了广泛应用。无人机库作为无人机的重要基础设施,其自动充电系统的研发对于提高无人机作业效率和安全性具有重要意义。本文重点对基于无人机库的自动充电系统进行研究,以期更好地促进无人机技术的发展。
1" "无人机库自动充
电系统设计
1.1 系统整体架构设计
无人机库自动充电系统设计目标在于实现无人机充电的自动化和智能化。该系统主要由无人机检测与定位模块、充电桩模块以及充电控制与管理模块组成,每个模块均有相应的关键功能(如图1所示)。
(1)无人机检测与定位模块。该模块负责无人机的识别和定位。通过高精度的视觉识别、雷达探测等技术,系统能够准确地检测到无人机的位置、姿态等信息,并将其与预先设定的无人机库地图进行比对,以确定无人机的精确位置。
(2)充电桩模块。该模块是自动充电系统的核心。充电桩具有自动升降、旋转等功能,以适应不同位置、不同姿态的无人机充电需求。充电桩上还配备了多个充电接口,能够同时给多台无人机进行充电。此外,充电桩还具备安全防护功能,如过载保护、短路保护等,确保充电过程的安全性。
(3)充电控制与管理模块。该模块负责整个自动充电系统的控制和管理。通过与无人机检测与定位模块、充电桩模块的通信,该模块能够实时获取无人机的位置、姿态、电量等信息,并根据这些信息制定充电计划。同时,该模块还负责监控充电过程,确保充电的顺利进行,并在充电完成后及时通知相关人员[1]。
1.2 无人机检测与定位技术
(1)视觉识别。视觉识别系统利用高清摄像头捕捉无人机图像,并通过图像处理算法识别出无人机的形状、大小等特征。该系统通过与预设的无人机模型进行比对,实现无人机的精确识别。
(2)雷达探测。雷达探测系统通过发射电磁波并接收反射回来的信号,来探测无人机的姿态和位置。雷达探测系统不受光线、天气等外部条件的影响,能够全天候工作。此外,雷达探测系统还能够提供无人机的距离、速度等信息,为无人机的定位和控制提供重要参考。
1.3 充电桩设计与功能实现
(1)充电桩设计。充电桩采用模块化设计,涉及自动升降装置、旋转装置、多个充电接口、视觉识别系统。同时充电接口模块采用标准化设计,兼容多种型号的无人机,确保广泛的适用性。自动升降模块和自动旋转模块则通过电机驱动,实现充电桩的灵活调整,以适应不同高度和方向的无人机[2]。
(2)功能实现。①自动识别:充电桩通过内置的传感器和识别系统,能够自动识别靠近的无人机型号和充电需求。一旦无人机进入充电区域,充电桩即可通过信号传输获取其信息,为后续的自动对接和充电做准备。②自动对接:当无人机进入充电桩的识别范围内时,自动升降模块和自动旋转模块会根据无人机的位置和姿态进行调整,确保充电接口与无人机上的充电接口精准对接。对接过程由控制系统自动完成,无须人工干预,提高了充电的便捷性和效率。③自动充电:对接成功后,充电桩会启动充电程序,通过充电接口向无人机提供稳定的电流和电压。
1.4 充电控制与管理策略
(1)状态检测与识别。系统通过实时获取无人机和充电桩的状态信息,如电量、位置、故障状态等,根据这些信息准确判断无人机的充电需求和充电桩的可用性[3]。
(2)优先级排序。根据无人机的电量、任务紧急程度等因素,系统对无人机进行优先级排序。电量低或任务紧急的无人机将优先获得充电机会。
(3)充电桩调度。根据充电桩的状态和位置信息,系统实时调度空闲的充电桩进行充电服务。如果多个无人机同时需要充电,系统将根据优先级和充电桩的负载情况,合理分配充电资源。
(4)充电过程监控。在充电过程中,系统实时监控无人机的充电状态和充电桩的运行情况。一旦发现异常情况,如过充、过热等,系统将立即停止充电,并采取相应的安全措施。
2" "自动充电系统关键技术研究
2.1 无人机状态识别与定位算法优化
2.1.1 无人机状态识别算法优化
在无人机状态识别方面,采用深度学习中的卷积神经网络(CNN)模型。首先,收集大量无人机图像数据并进行数据预处理和增强,以提高模型的泛化能力。其次,设计了一个深度CNN模型,该模型包括多个卷积层、池化层和全连接层,用于提取图像中的特征并识别无人机的状态[4]。
2.1.2 多传感器融合定位算法优化
在定位算法方面,采用多传感器融合的定位算法。该算法集成了GPS、IMU(惯性测量单元)和视觉传感器等多种传感器数据。对每种传感器数据进行预处理和校准,以确保数据的准确性和一致性。然后,采用卡尔曼滤波算法对多传感器数据进行融合处理。此外,还引入了加权因子来调整不同传感器数据的权重,以适应不同环境下的定位需求。
2.2 充电接口自动化匹配技术研究
2.2.1 机器视觉识别系统
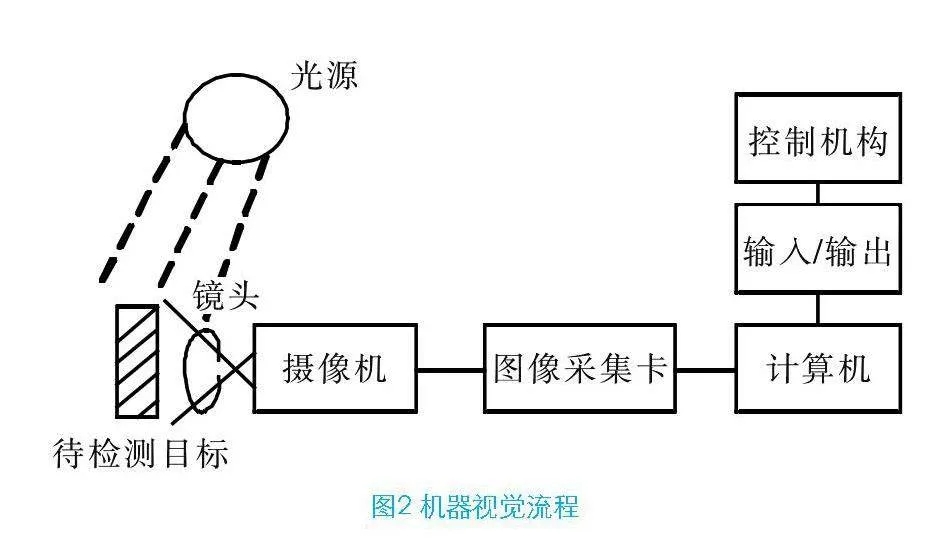
机器视觉技术是一项综合性的技术,涉及图像处理、电光源照明、光学成像、智能判断与决策、传感器技术等多个领域(如图2所示)。通过图像摄取装置(如摄像头)捕捉目标图像,利用光学镜头和感光器件(如CMOS或CCD)将图像转换为电信号,再经过图像处理芯片的处理,形成数字化图像信息。这些信息随后被数字图像处理系统分析,提取目标特征,并据此控制无人机的充电接口位置和姿态[5]。
2.2.2 机械臂系统
机械臂系统由电机、关节和夹爪等组成,通过电机驱动关节运动,夹爪用于抓取和放置无人机。
在机器视觉识别系统和机械臂系统支持下,充电接口自动化匹配流程如下:①图像采集。当无人机接近充电桩时,利用搭载的图像摄取装置捕捉无人机和充电桩的实时图像。②图像预处理。对采集到的图像进行去噪、增强等预处理操作,以提高后续处理的准确性。③匹配判断。根据提取的特征信息,进行无人机与充电桩的匹配判断。如果匹配成功,则进入下一步,否则,调整无人机姿态,重新进行匹配。④机械臂动作。当匹配成功后,控制系统根据匹配结果控制机械臂动作,将无人机准确放置在充电桩上。⑤充电开始。将无人机成功放置在充电桩上后,开始充电过程。
3" "自动充电系统实验验证与性能分析
3.1 实验平台搭建
实验平台主要包括无人机、充电桩、机械臂、视觉识别系统、控制系统等关键部件。
(1)模拟作业场景:通过模拟不同的无人机作业场景,如飞行高度、速度、姿态等,测试自动充电系统在不同环境下的性能表现。
(2)充电接口匹配实验:在无人机接近充电桩时,利用视觉识别系统进行充电接口的自动匹配,记录匹配成功率和匹配时间。
(3)充电效率测试:对成功匹配的无人机进行充电,记录充电过程中的电流、电压、功率等参数,并计算充电效率。
(4)安全性评估:在整个实验过程中,对系统的安全性进行评估,如无人机与充电桩之间的碰撞情况、机械臂操作的稳定性等。
3.2 数据分析与结果解读
3.2.1 充电接口匹配率
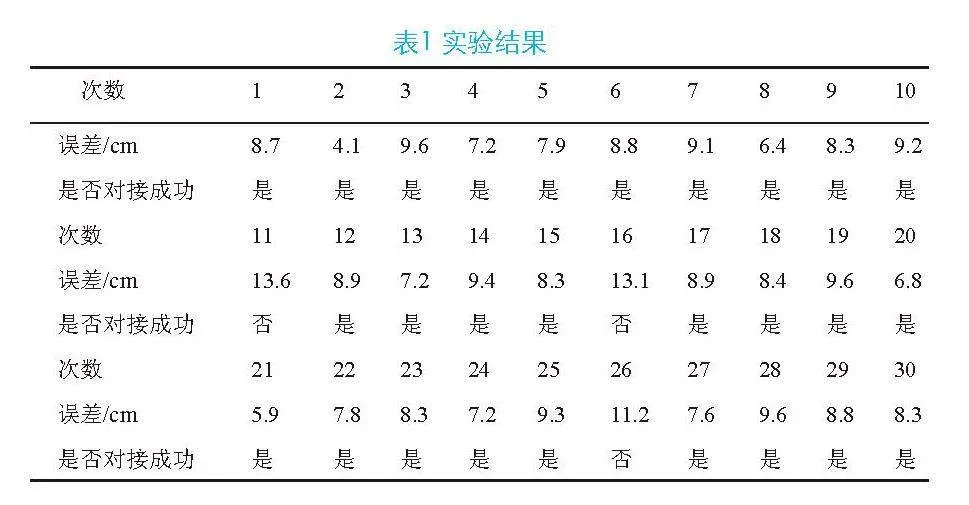
在验证充电接口匹配率时,设定充电桩的对接区域为一个以充电桩中心为圆心、半径为rc的圆。只要无人机的落点与充电桩中心的距离误差小于rc,即视为对接成功。根据实验平台的尺寸和设定,顶部圆半径rt=2 cm,底部半径rb=12 cm,高度h=10 cm,可以计算出合适的rc值以确保足够的容错范围。表1给出了30次实验的结果,记录了每次实验的误差距离以及是否成功对接。
在30次实验中,有27次成功对接,对接成功率为90%。这一结果表明,本此研究设计的自动充电系统具有较高的对接成功率,验证了系统的可行性和可靠性。
3.2.2 充电效率与安全性
在充电效率方面,通过记录无人机在充电过程中的电流、电压、功率等参数,并与标准充电参数进行对比,计算出充电效率。结果显示,自动充电系统的充电效率与传统手动充电方式相当,甚至在某些情况下还比后者略高,这主要得益于自动充电系统能够更精确地控制充电过程。
在安全性方面,密切关注无人机与充电桩之间的碰撞情况以及机械臂操作的稳定性。整个实验过程中未发生任何碰撞事故,机械臂操作稳定可靠,确保了充电过程的安全性。
4" 结束语
本文中研究了基于无人机库的自动充电技术,设计了一套完整的自动充电系统,并探讨了关键技术的优化与应用。通过实验验证,本文中所设计的自动充电系统具有较高的稳定性和效率,为无人机技术的进一步推广和应用提供了有力支持。■
参考文献
[1] 赵千里,干依燃,蔡鼎阳,等.基于视觉的无人机室内自动导航充电模拟[J].科技视界,2023(6):99-102.
[2] 刘杰荣,王伟冠,何其淼,等.蛙跳式充电的无人机自主巡线技术与系统(二):基于机器视觉的自动充电控制[J].电力科学与技术学报,2021,36(6):182-188.
[3] 孙立群.无人机锂电池免插拔的自动充电系统设计[J].单片机与嵌入式系统应用,2021,21(8):87-91.
[4] 杨文琛,周海燕,高翔,等.一种全自动无人机充电系统的实现方案[J].电脑知识与技术,2019,15(6):228-229,241.
[5] 鹿彬,王刚,李建兴.车载智能充电无人机机库系统设计[J].科技创新与品牌,2018(9):68-71.
作者简介:熊" "斌(1979—),男,汉族,江苏南通人,高级工程师,硕士研究生,研究方向为电力工程。
沈伶康(1985—),男,汉族,江苏苏州人,高级工程师,硕士研究生,研究方向为电力工程。
姚晓君(1989—),男,汉族,江苏张家港人,高级工程师,硕士研究生,研究方向为电力工程。
陆杨文(1983—),男,汉族,江苏苏州人,高级工程师,硕士研究生,研究方向为电力工程。
