基于双光谱融合的输煤栈桥过温预警系统
2024-12-22陈剑华王美战张飞桂端程昆









摘要:燃煤电厂的输煤栈桥因空间狭小、位置高、设备集中、廊道窜风效应大,导致着火初期不易发现,产生过温后发展迅速、扑救困难等特点。本文研究了基于可见光目标检测和热成像温度场融合分析技术,实时获取输煤栈桥各个部件和场地环境的温度,不仅可以将红外热图得到的过温点在可见光图像中定位,而且可以利用可见光图像来判断视频图片中的阳光直射、反射对红外热图的干扰,提高了系统的整体识别准确度,现场测试结果达到95%的识别率。
关键词:输煤栈桥;双光融合;过温预警;多元化告警
Abstract:Thecoaltransportwharfofcoalfiredpowerplantsisdifficulttodetectintheearlystageoffireduetoitssmallspace,highlocation,concentratedequipment,andlargecorridorwindeffect.Afteroverheatingoccurs,itdevelopsrapidlyandisdifficulttoextinguish.Thisarticlestudiesthefusionanalysistechnologyofvisiblelighttargetdetectionandthermalimagingtemperaturefield,whichcanrealtimeobtainthetemperatureofvariouscomponentsandsiteenvironmentofcoaltransportationwharf.Itcannotonlylocatetheoverheatingpointsobtainedfrominfraredthermalimagesinvisiblelightimages,butalsousevisiblelightimagestojudgetheinterferenceofdirectsunlightandreflectiononinfraredthermalimagesinvideoimages,improvingtheoverallrecognitionaccuracyofthesystem.Theonsitetestresultsachievearecognition rateof95%.
Keywords:coaltransportationwharf;Duallightfusion;Overtemperaturewarning;Diversifiedalarms
输煤栈桥输送线路长,运行设备种类多,栈桥内环境质量差,巡检点多,在运行前、运行中都要定时、定点巡检,这些都会导致人工巡检作业劳动强度高、积极性差、安全性低。栈桥内现有工业电视监控范围局限,栈桥内现场状态监测要素少,难以实现输煤栈桥全线路的状态实时、量化监测与管理,存在环境起火难预测、设备运行故障难监测、恶劣环境下的人员安全难保障的问题。同时,输煤栈桥采用全封闭钢结构栈桥,栈桥内相对密封,无供暖、降温设施,通风方式为机械通风;温湿度受气候、季节影响较大,受栈桥内设备运行时的升温散热影响。输煤栈桥内部温度约为空气环境温度的1.3倍,夏季,栈桥内环境温度最高约44℃。该温度已经超出DL50002000规定的室内高温作业温度。
一个典型的案例分析如下:皮带拉紧装置的导向滚筒轴承在受力方向严重磨损,有部分金属熔化,外壳破碎,轴承损坏。滚筒轴端头被磨成锥形,面呈蓝黑色(估计温度达1000℃以上),由于轴承的破碎,导向滚筒掉落时将两端的轴承座拉碎,滚筒脱出轴承座掉在栈桥地板上,高达1000℃以上的滚筒轴头埋在栈桥积存的煤粉中,将着火点为410℃的煤粉引燃。导向滚筒掉落后,运转中的皮带与拉紧皮带进口的槽钢接触,与皮带直接摩擦使其过热(表面已烤成蓝色),温度高达600℃以上的钢板又将煤粉引燃。引燃的煤粉和过热的钢板与皮带接触,将阻燃皮带(430℃~480℃)引燃。因此,如何采用有效的监测技术提供输煤栈桥相关区域、部件的过温预警,对于起火前皮带、轧辊等部件以及重点区域进行温度实时监控,实现火灾的早期预警,对保障工作人员、现场设备的生命财产安全具有重要意义[1]。
采用传统的传感器来探测火灾,较难满足火灾早期阶段的检测需求,也就是发现过温源[1]。随着计算机技术、新一代信息技术的发展,巡检机器人技术、图像识别技术和红外测温技术在业界获得了广泛的应用。与传统的传感器过温检测设备相比,基于机器人视觉的过温检测技术具备准确度高、识别时间短、使用范围广等优势。基于火焰的温度特性,工程项目中经常使用热像仪的红外测温功能,当温度超过设定阈值时,则判定为发生火灾。但该方式对现场的阳光直射、高温物体容易引起误报。针对上述两种检测方法的局限性,本文研究了基于可见光目标检测和热成像温度场融合分析技术,实时获取输煤栈桥各个部件和场地环境的可见光图像和红外热图,并利用可见光的特征识别,初步确定环境太阳光直射、发热等区域,同时判断红外热图的过温度阈值的热图区域,不仅仅可以将红外热图得到的过温点在可见光图像中定位,而且可以利用可见光图像来判断视频图片中的阳光直射、反射对红外热图的干扰,提高了系统的整体识别准确度。
1技术方案
本文提出了一种可见光和红外热图的双通道实时过温预警系统,通过双通道同时采集可见光和红外热图的实时视频,采用神经网络算法对可见光视频中的特征进行分析,识别出阳光直射、反射等干扰区域。再将可见光中干扰区域的位置映射到同一时刻的热成像视频中,通过温度矩阵分析出过温位置区域内的温度信息,并滤除可见光判断的干扰区域后,判定剩余红外热图的过温阈值区域并触发报警,如图1所示。
1.1可见光目标检测
目前,随着图像检测技术的不断发展,主要有两大类目标检测算法:基于RegionProposal的RCNN系列和YOLO、SSD系列。前者属于两阶段目标检测算法[34],如RCNN、FastRCNN、FasterRCNN,它需要先使用SelectiveSearch或者CNN网络来产生候选区域,然后对候选区域上做目标分类和回归。后者属于单个网络结构算法[56],它能够在产生候选区域的同时直接预测出不同目标的类别和位置。虽然RCNN系列精确度比较高,但速度较慢;与之相对,YOLO系列的精确度相对较低,但速度更快。实际上,YOLOv3的检测速度非常快,比RCNN快1000倍,比FastRCNN快100倍[7]。考虑到火灾事故发生迅速,为了满足快速检出的需求,最终本文选用了单网络结构中的YOLOv3作为实现算法。
为了提高目标场景下的识别率,本文在真实输煤场景下模拟了太阳光直射、发热等场景,也包括过温点,用于采集对应的可见光视频作为原始样本。结合实际过温点的多样性,本文采集样本时遵循了太阳光线、过温类型、采集地点、采集角度等相关元素的组合分布原则,并通过图2开发实现步骤,最终实现了基于热辐射的红外图谱的干扰源的分离。
1.2热像仪温度分析
红外热成像技术是利用红外辐射的“大气窗口”的波段进行成像,目前研究较多的是采用中波红外(3~5μm)和长波红外(8~14μm)两个波段进行探测,将这些波段的辐射转换为人眼可观测并可供测量分析的图像数据。红外热像仪可以在不接触被测量物体的情况下准确测量出目标物体的温度,并将其温度分布情况进行可视化显示,如相对温度分析、温度直方图分析、历史温度曲线图、线上温度曲线图等辅助温度分析,因此可对测量到的温度进行精确化分析。
本文通过调用热像仪厂商的SDK,获取了热成像的实时温度矩阵。温度矩阵的数据类型为float类型,每个float占用4个字节。通过温度矩阵文件,获得了矩阵宽度(INT)和矩阵高度(INT),最终通过从左往右、从上往下扫描的方式获取了具体像素点上的温度数据,如图3所示。为了更好地分析输煤场景的温度特征,本文在输煤的真实场景下模拟了大量的热成像视频,用于评估部件的温度特性。
1.3双光谱融合过温检测
图4(a)给出了太阳光的全光伏图,图4(b)是大气的光谱透过率曲线[2],很明显,由于8~14μm之间存在一个高透过率的窗口,因此,热像仪的像敏单元的光谱响应也利用这个窗口来探测,并能给出热像视场中的数字化热图及其相对应的各种现场设备、背景的温度图谱。与此同时,也存在由于太阳光直射、反射带来的干扰。利用上方两种方式的互补性,可在快速识别的基础上提高识别准确度。
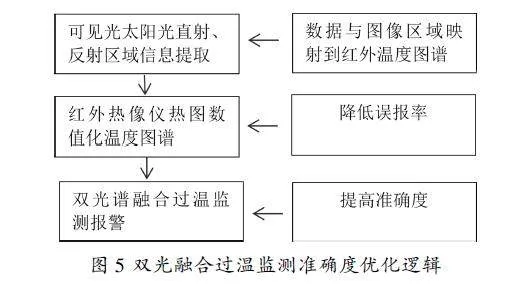
本文选用巨哥MAG24AI智能热像仪,红外分辨率320×240,红外像素尺寸22μm,可见光分辨率1920×1080,测温精度1.5℃,测温范围-20℃~150℃,测温环境温度-10℃~50℃。选用大视场角镜头,镜头焦距6.5mm,视场角61°×46°,提高过温检测的范围。该相机内置了2T算力的NPU,支持TensorFlow、Pytorch、Caffe、ONNX等框架,用于YOLOv3过温检测的神经网络加速。同时该双光谱相机搭载的可见光和热成像视场同轴,可见光和热像仪的双视场可精确同步,基于可见光中的准过温位置精准换算出该准过温在热像仪中的位置。因此,可通过热像仪的温度矩阵分析出过温位置的温度值信息,当超过设定的阈值后,可确认为潜在的发生火灾风险并触发报警。通过调参,降低可见光过温检测的漏报率,再通过热成像温度校验,降低过温的误报率,最终提高整体的识别准确度,如图5所示。
2系统功能
2.1系统组成
本系统的机器人本体配置了高性能工控机(NVIDIAJetson系列芯片),将机器人从底层驱动到前端展示程序全套软件部署在机器人内部的工控机上,实现单机部署单机运行。整体上由三大部分组成,如图6所示:
(1)设备层:配备行走电机、升降电机、云台电机用于驱动机器人运动,搭载可见光和热像仪视觉传感器用于实时监控项目现场;
(2)控制层:由运动控制和云台控制两个嵌入式程序组成,用于机器人的轨道行走控制和云台转动控制;
(3)应用层:核心业务系统根据设定的任务调度机器人执行巡检任务,在巡检过程中智能识别系统对视野范围内的画面进行实时检测,并最终在机器人控制系统的Web端和APP端进行巡检结果和告警信息的查看。
2.2基本功能
本系统的机器人可用于输煤栈桥过温自动报警,主要具备以下功能:
(1)机器人具备低电回冲功能,保障机器人持续不断电巡检;
(2)机器人具备自主巡检功能,根据设定的任务自动执行即时任务、定期任务和周期任务;
(3)机器人具备过温检测功能,机器人开机后将实时检测视野范围内是否存在过温;
(4)机器人具备异常告警功能,当检测到过温时机器人将告警信息立即告知相关人员。
2.3告警功能
2.3.1多元告警设计
与单一方式告警相比,多种告警方式将会更加可靠、适用范围更广。本文设计了三大类告警方式,如下:
(1)机器人本体声光报警:通过机器人本体扬声器和灯带,告知在生产现场的工作人员。
(2)Web端弹窗和语音播报:通过PC电脑,告知监控室内的工作人员。
(3)手机APP消息推送:通过手机APP,告知不受地理位置限制的工作人员。
以上每种方式都有各自的适用场景和优缺点,机器人本体声光告警适用于机器人附近有人的场景;Web端弹窗和语音播报适用于监控室内值班人员;而APP消息推送则不受人员工作位置限制,可远程实时知晓告警信息。因此,本文选择采用多元化的告警方式,而不是单一的告警,提高告警信息的知晓率。
2.3.2人机交互设计
2.3.2.1机器人本体声光告警
机器人本体搭载的语音模块和状态指示灯如图7所示,一方面可自定义过温告警是否开启本体语音联动、播报次数、播报间隔、播报内容、音量大小;另一方面可自定义过温告警是否开启本体指示灯联动、指示灯颜色、闪烁顺序、闪烁频率,用于满足不同客户的不同诉求。
2.3.2.2电脑Web端弹窗和语音告警
机器人Web端全局弹窗设置和语音播报,不论当前Web停留在何页面,不论值班人员是否坐在电脑前,只要检测到过温,Web端将第一时间弹出弹窗并语音播报,使得监控室内的工作人员知晓异常,并可查看可见光和热像仪照片,确认是否真实发生过温,如图8中的(a)(b)(c)所示。
2.3.2.3手机APP端告警通知
手机APP端告警通知,可以随时随地不论APP在线、离线,都能通知到责任人,并可查看可见光和热像仪照片,确认是否真实发生过温,如图9、图10所示。
结语
本文基于双光融合方案,采用可见光YOLOv3目标检测算法和热像仪温度分析,开发出了过温实时视频检测系统。本系统在大量的输煤栈桥场景项目中进行了部署和运行,项目应用表明本系统能在第一时间发现过温并通知到人。本系统机器人本体声光告警、电脑Web端弹窗和语音告警、手机APP端告警通知,大大提高了人员知晓率,使得相关人员在第一时间知晓过温告警,很大程度上解决了输煤栈桥场景下第一时间发现过温的痛点需求。
参考文献:
[1]万传宝.输煤皮带燃点煤超温检测及喷淋灭火装置[J].华电技术,2015,37(08):52+55+78.
[2]赵义文,郭瀚文.线型感温火灾探测器现场定量检测技术研究[J].消防科学与技术,2018,37(11):15541556.
[3]黄明珠,黄文清.基于改进FasterRCNN的Logo目标检测方法[J].计算机系统应用,2019,28(02):4148.
[4]王林,张鹤鹤.FasterRCNN模型在车辆检测中的应用[J].计算机应用,2018,38(03):666670.
[5]张彬彬,帕孜来·马合木提.基于YOLOv3改进的火焰目标检测算法[J].激光与光电子学进展,2021,58(24):289296.
[6]高桂雨,李丁祎,赵娟娟,等.基于目标检测SSD算法的森林火灾监测模型研究[J].电脑知识与技术:学术交流,2022(002):018.
[7]蔡毅,汤锦亚.对红外热成像技术发展的几点看法[J].红外技术,2000(02):26.
作者简介:陈剑华(1971—),汉族,男,上海市人,学士,中级职称,研究方向:火力发电厂智能运维。