考虑侧向稳定性的四轮转向车辆横纵向综合控制器设计
2024-12-11张子越黄连丽周奎邢迪顾龙昊









摘要:为提高车辆的跟踪精度与侧向稳定性,根据四轮转向车辆的机动性特点,设计1种考虑侧向稳定性的横纵向综合跟踪控制器。基于上层提供的参考速度,在考虑道路曲率与侧向加速度约束的条件下进行安全速度约束,得到平滑的安全速度曲线;将横向跟踪与速度跟踪结合,搭建基于模型预测控制算法的横纵向跟踪综合控制模块,以参考路径、安全速度为目标,求解横纵向同时约束下的前后轮转角与纵向期望加速度;基于车辆逆纵向动力学模型设计纵向下位控制模块,考虑车辆载荷转移效应,根据纵向期望加速度计算电机扭矩与车轮制动力矩;选用CarSim与Matlab/Simulink平台进行双移线工况联合仿真实验,且与横纵向独立控制器进行实时性对比,验证设计控制器的跟踪精度和侧向稳定性。结果表明:设计控制器的跟踪效果较佳,横向跟踪误差峰值为0.0384m、横摆角误差峰值为0.27°、速度跟踪误差峰值为0.0973 kmh、车辆侧向加速度不超过0.4g,且合加速度处于附着椭圆内,可满足精度与稳定性要求;同时控制器迭代时间较独立控制器缩短了29.1%,有效提高了车辆控制的实时性。
关键词:路径跟踪;速度控制;四轮转向;横纵向综合控制;模型预测控制;联合仿真
中图分类号:TP273;U461文献标志码:A doi:10.12415/j.issn.1671-7872.24097
Design of Lateral and Longitudinal Controller for Four Wheel Steering Vehicles Considering Lateral Stability
ZHANG Ziyue,HUANGLianli\",ZHOU Kuib⁴,XING Di⁴,GULonghao
(a.School of Electrical and Information Engineering;b.School of Automotive Engineers;c.School of MechanicalEngineering,d.Department of Sharing-X Mobile Service Technology Platform Joint Lab,Hubei University ofAutomotive Technology,Shiyan 442000,China)
Abstract:To improve the tracking accuracy and lateral stability of vehicles,a lateral and longitudinal integrated tracking controller considering lateral stability was designed based on the maneuverability characteristics of a four-wheel steering vehicle.Based on the reference speed provided by the upper layer,safety speed constraints were applied under considerations of road curvature and lateral acceleration constraints,resulting in a smooth and safe speed curve.Integrating lateral tracking with speed tracking,a combined lateral and longitudinal tracking control module based on a model predictive control algorithm was developed.With the reference path and safe speed astargets,the front and rear wheel steering angles and longitudinal desired acceleration were solved under simultaneous longitudinal and lateral constraints.A lower-level longitudinal control module was designed based on the inverse longitudinal dynamics model of the vehicle,while considering the load transfer effect of the vehicle,and the motor torque and wheel braking torque according to the longitudinal desired acceleration were calculated.CarSim and Matlab/Simulink platforms were used for joint simulation experiments under double lane change conditions,and real-time comparisons were made with independent lateral and longitudinal controllers to verify the tracking accuracy and lateral stability of the designed controller.The results show that the designed controller achieves good tracking performance,with a peak lateral tracking error of 0.0384 m,a peak yaw angle error of 0.27°,a peak velocity tracking error of 0.0973 km/h.The lateral acceleration of the vehicle does not exceed 0.4g,and the resultant acceleration remains within the adhesion ellipse,satisfying the requirements for precision and stability.Meanwhile,the iteration time of the integrated controller is reduced by 29.1%compared to the independent controllers,which can improve the real-time performance of vehicle control.
Keywords:pathtracking;speedcontrol;four-wheelsteering;lateral and longitudinal combined control;model predictive control;joint simulation
自动驾驶技术可有效提高交通出行效率和车辆行驶安全,已成为汽车技术的发展趋势[]。车辆路径跟踪控制作为自动驾驶的关键技术之一2,主要包括横向控制与速度控制。作为线控转向的应用场景之一,四轮转向(four wheel steer,4WS)是汽车智能化系统的关键技术3,能够调节后轮转角大小,可控自由度高。相比前轮转向(front wheel steer,FWS),4WS能够改善车辆转向机动性与操纵稳定性4,近年在国产轿车中得到了快速普及I⁵-6。但随着车辆可控自由度的增加,4WS存在控制量冗余的问题。因此,开展对4WS车辆控制算法的研究,利用4WS车辆的高自由度优势实现更安全、更高效的自动驾驶体验,对于推动自动驾驶技术的进步具有重要意义。
对于4WS车辆路径跟踪与车辆横纵向跟踪控制,国内外学者进行了相关研究。高晋等4针对4WS车辆提出了1种基于非线性轮胎模型的线性时变模型预测控制(linear time varying-model predictive control,LTV-MPC)方法,对轮胎非线性模型进行局部线性化,可改善车辆的操纵稳定性;石沛林等7在MPC路径跟踪算法中加入轮胎侧偏角与车辆状态参数包络约束,可使车辆在高速或低附着路面行驶时保持良好的路径跟踪能力,且行驶稳定性较好;邓召文等图设计以横摆角速度和质心侧偏角为优化目标的4WS线性控制二次型最优控制模型,并基于路径跟踪策略建立预瞄驾驶员方向控制模型,可改善汽车质心侧偏角和横摆角速度的动态响应特性;Chen等以前轮转向车辆八自由度模型作为MPC预测模型,并通过前后向积分策略生成轮胎路面附着极限内的时间最优速度曲线,采用PID(proportional integral derivative)控制算法进行速度跟踪,实验结果表明车辆的轨迹跟踪和速度跟踪性能良好,但高自由度预测模型计算量较大,不利于车辆的实时性控制;张平等0基于前轮转向车辆,设计横向MPC跟踪控制器与纵向PID控制器,采用设计的控制器能够使车辆稳定地跟踪期望速度,但根据道路曲率设计的期望加速度变化较大,不利于车辆的平顺性控制;邓涛等1将前轮转向车辆横纵向模型解耦并分别设计独立的MPC控制器,该策略能够满足车辆横向稳定性、舒适性和平顺性等要求,但双MPC控制器计算量较大,不利于车辆的实时性控制;孔慧芳等2]针对前轮转向车辆,在路径跟踪控制策略中引入车速调节机制,采用PID控制算法实现纵向控制,该策略能够根据道路曲率实时调节车速,但在经过曲率弯道后速度恢复较慢,不利于车辆顺利通过。
综上所述,目前对于4WS车辆路径跟踪的研究主要集中于恒定速度下的跟踪控制,较少考虑道路曲率变化对车辆跟踪精度与稳定性的影响;对于前轮转向车辆的横纵向研究主要集中于横纵向解耦独立控制,计算量较大,不利于车辆的实时性控制。当道路曲率或车速过大时,侧向加速度较高,轮胎侧偏力趋于饱和,易导致车辆侧滑偏离道路。对此,引入1种考虑侧向稳定性的安全速度计算方法,设计1种4WS车辆的横纵向综合控制器,基于参考轨迹与侧向加速度约束得到车辆安全速度,以参考轨迹与期望速度为跟踪目标设计横纵向综合控制器,求解前后轮转角、电机扭矩与车轮制动力矩,以期在提高车辆跟踪性能的同时改善车辆的侧向稳定性。
1 4WS车辆动力学模型的建立
对于车辆横摆模型的选取,需要综合考虑模型的精度和计算的复杂度。运动学模型具有参数易获取、计算量小等优点,但在较高速度行驶时误差有所增大;在低速和高速情况下能够较好地描述车辆运动状态,但计算量较大,不利于实时性控制。
基于上述分析,选取车辆动力学模型作为预测模型,并作出简化与理想化假设:使用单轨模型代替四轮模型,简化计算;忽略车辆的垂向、俯仰和侧倾运动;仿真工况道路绝对平坦,不存在坡道阻力;轮胎滑移率较小。
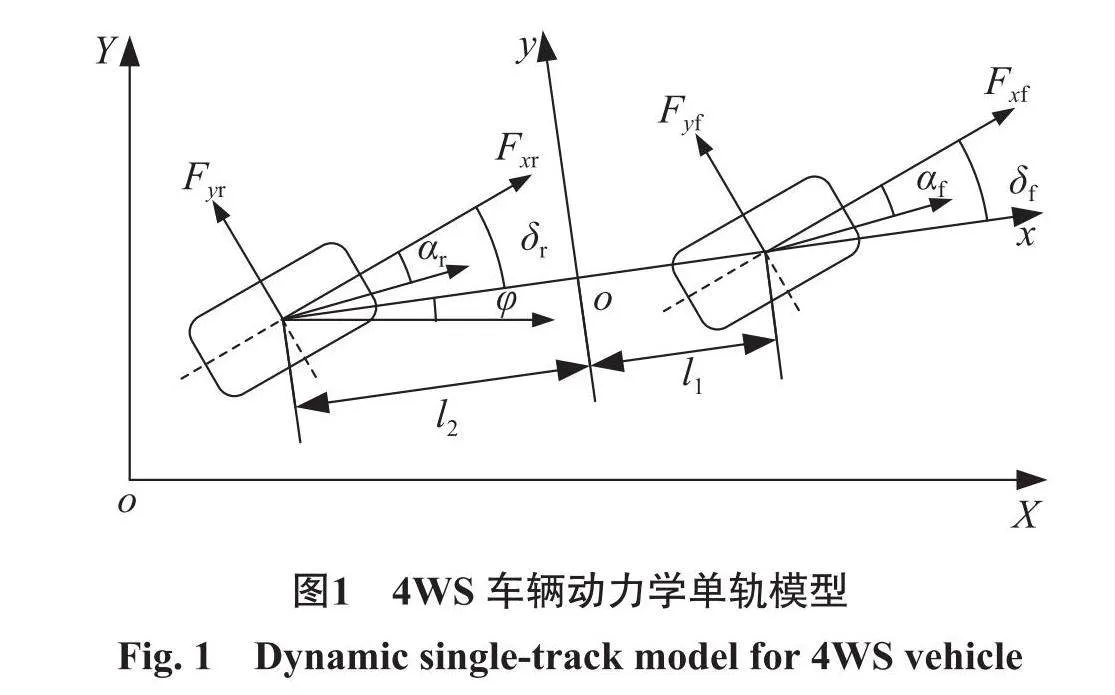
基于上述简化与假设,建立如图1所示的4WS车辆动力学单轨模型。
图中:XOY为惯性坐标系;xoy为车辆坐标系;x轴为车辆纵向;y轴为车辆横向(侧向);φ为车辆横摆角;l₁,l₂分别为车辆前轴距与后轴距;F,F分别为前轮与后轮受到的纵向力;Fr,F,分别为前轮与后轮受到的侧向力;δf,δ分别为前轮与后轮转角;αr,α:分别为前轮与后轮侧偏角。对车辆横向与横摆自由度进行受力分析,如式(1):
(1)
式中:m为整车质量;J为整车绕z轴(垂直平面向外为正方向)的转动惯量;y,y分别为车辆坐标系下质心处侧向速度与加速度;x,x分别为车辆纵向速度与加速度;φ,4分别为车辆横摆角速度与加速度。当车轮转角δ较小时,忽略纵向轮胎力对侧向力的影响。基于小角度假设:
(2)
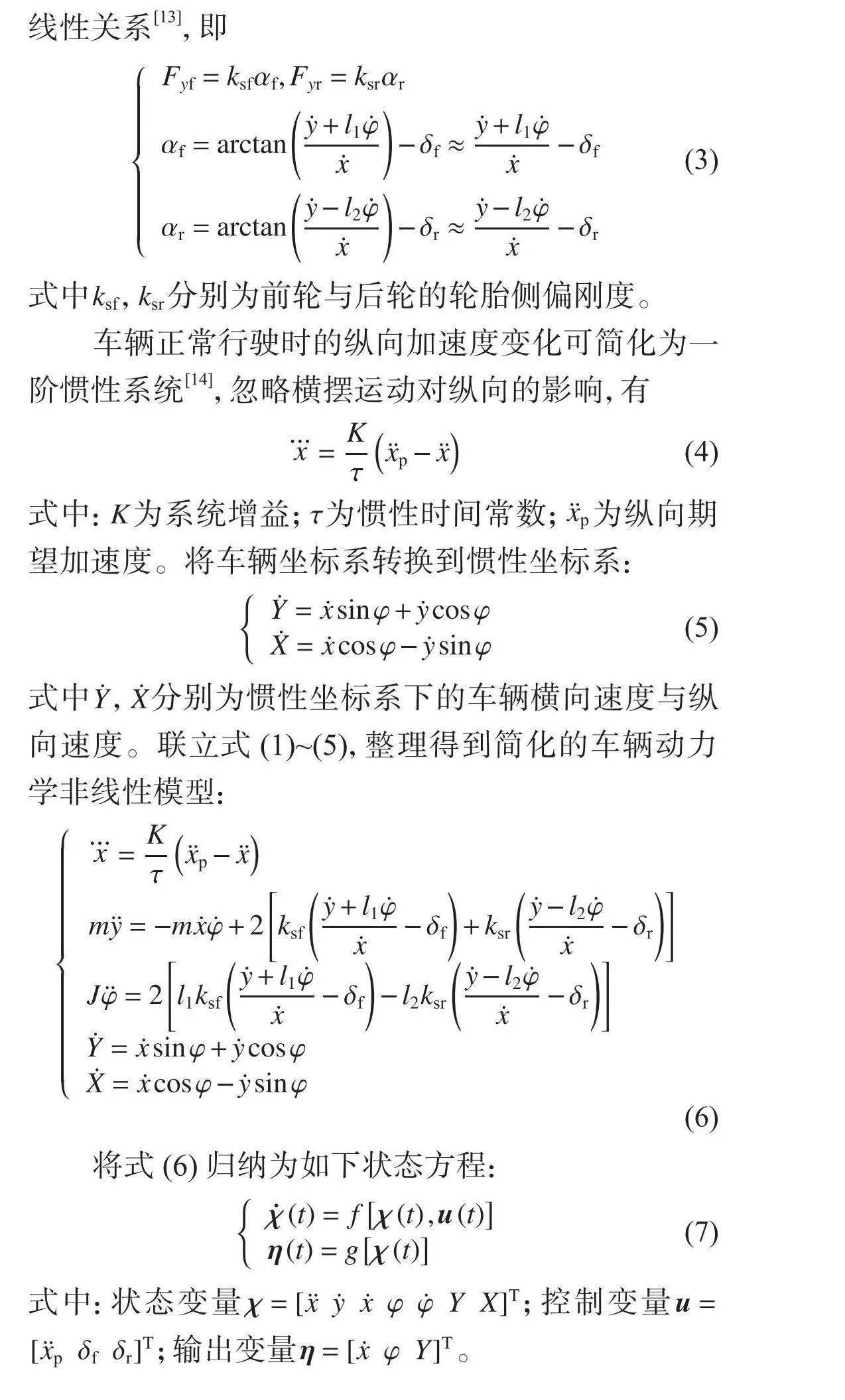
当轮胎侧偏角不超过5°时,侧偏力与侧偏角呈线性关系¹³3,即
(3)
式中ksr,kg分别为前轮与后轮的轮胎侧偏刚度。
车辆正常行驶时的纵向加速度变化可简化为一阶惯性系统41,忽略横摆运动对纵向的影响,有
(4)
式中:K为系统增益;r为惯性时间常数;xp为纵向期望加速度。将车辆坐标系转换到惯性坐标系:
(5)
式中Y,x分别为惯性坐标系下的车辆横向速度与纵向速度。联立式(1)~(5),整理得到简化的车辆动力学非线性模型:
(6)
将式(6)归纳为如下状态方程:
(7)
式中:状态变量x=[x y xφφY X]T;控制变量u=[xpδgδ,JT;输出变量η=[xφY]T。
24WS横纵向综合控制器的设计
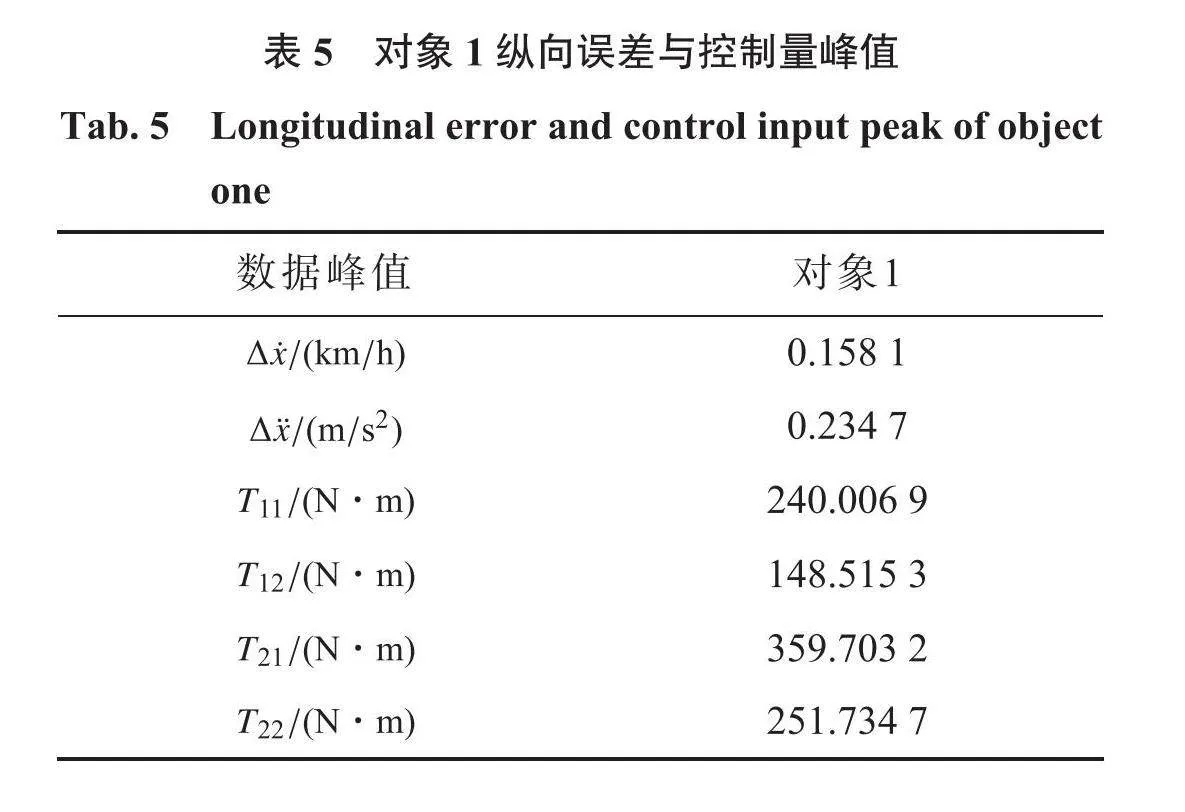
4WS横纵向综合控制器采用分层控制,包含3个部分:考虑道路曲率与侧向稳定性的安全速度约束模块、基于4WS车辆的路径跟踪控制模块与纵向下位力矩分配控制模块。总体架构如图2。
对于安全速度约束模块,在考虑道路曲率与侧向加速度约束的前提下基于参考速度xrer计算安全速度xp;对于模型预测控制模块,基于MPC算法,根据参考路径提供的横向位置Yer、横摆角4rer与速度约束模块提供的安全速度x信息,在线求解并得到前轮转角δf、后轮转角δ,与纵向期望加速度xp;对于纵向下位控制模块,根据车辆期望加速度与车辆行驶阻力选择相应的模式,通过控制电机扭矩与车轮制动力矩实现驱动与制动。
2.1安全速度约束模块
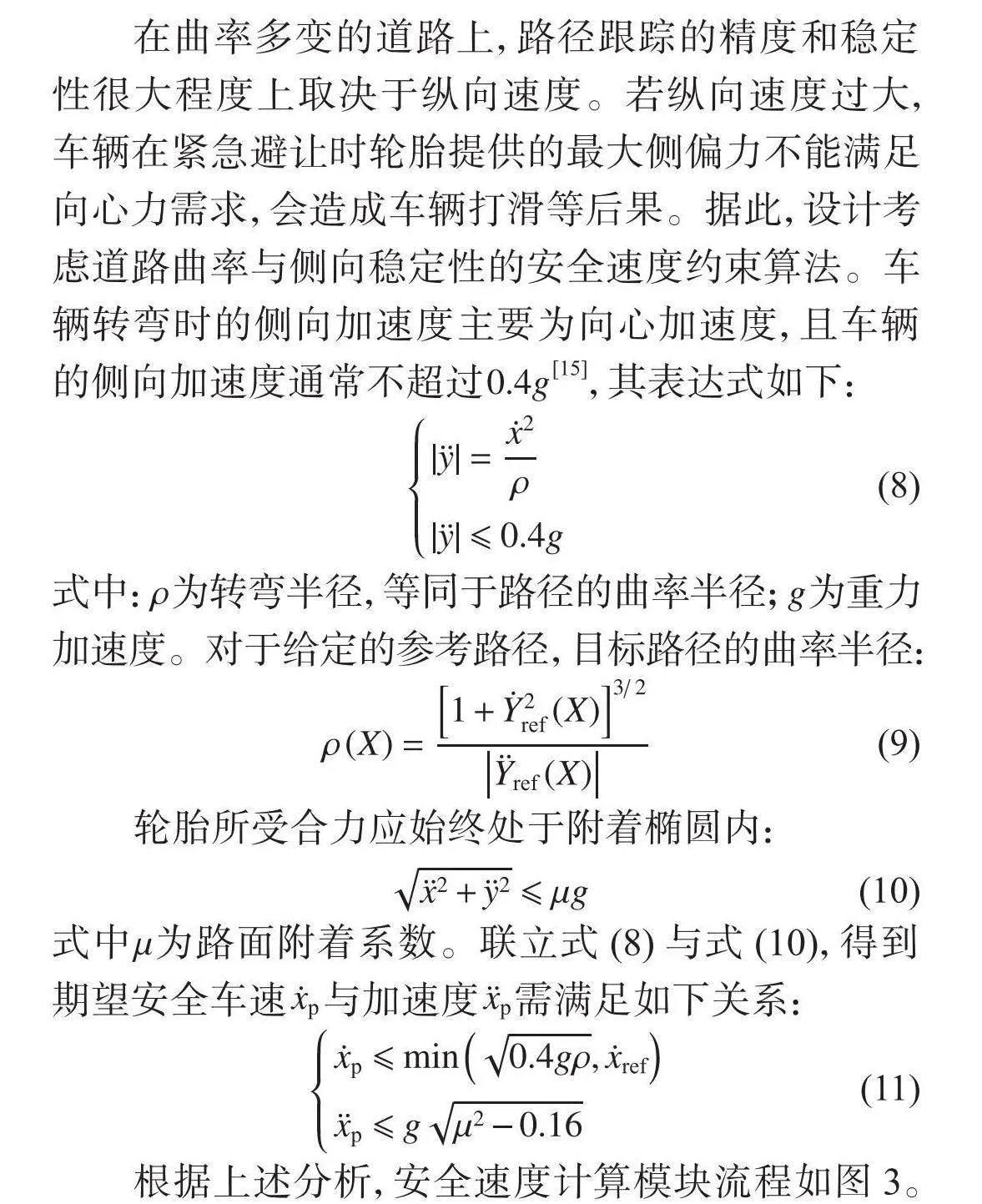
在曲率多变的道路上,路径跟踪的精度和稳定性很大程度上取决于纵向速度。若纵向速度过大,车辆在紧急避让时轮胎提供的最大侧偏力不能满足向心力需求,会造成车辆打滑等后果。据此,设计考虑道路曲率与侧向稳定性的安全速度约束算法。车辆转弯时的侧向加速度主要为向心加速度,且车辆的侧向加速度通常不超过0.4g¹5,其表达式如下:
(8)
式中:p为转弯半径,等同于路径的曲率半径;g为重力加速度。对于给定的参考路径,目标路径的曲率半径:
(9)
轮胎所受合力应始终处于附着椭圆内:
√x²+j²≤μg(10)式中μ为路面附着系数。联立式(8)与式(10),得到期望安全车速xp与加速度xp需满足如下关系:
(11)
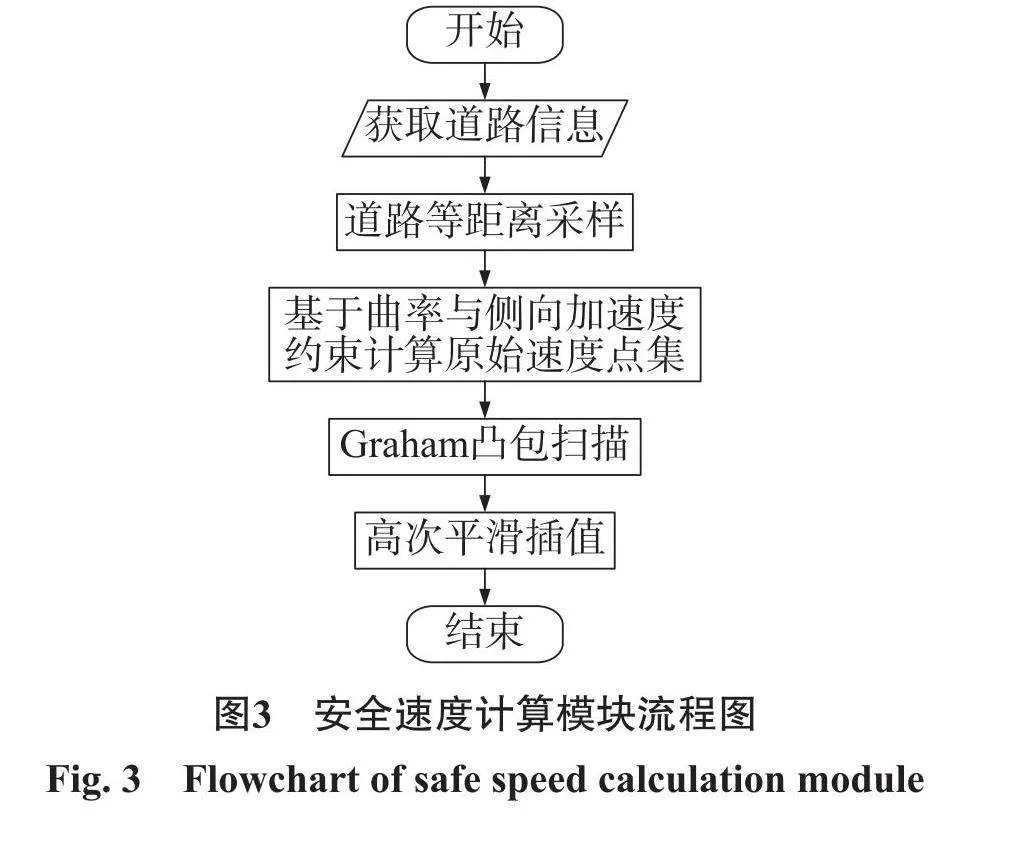
根据上述分析,安全速度计算模块流程如图3。开始
安全速度计算的主要步骤如下:
1)获取上层提供的参考道路与参考速度信息6;
2)对原始道路信息等距离采样,获得坐标、曲率等关键信息;
3)考虑道路曲率与侧向加速度约束,计算得到原始速度点集;
4)由于道路曲率多变,根据约束直接计算得到的速度变化较大,不利于车辆跟踪,为此对点集进行Graham凸包扫描,剔除波动点,得到速度凸点集;
5)为保证速度跟踪时的舒适性,使两点间的衔接更平滑,对筛选速度点集采用高次插值,得到平滑速度曲线。
2.2路径跟踪控制模块
对于路径跟踪控制模块,将横向与纵向模型结合进行预测跟踪,其中横向由前后轮转角控制;纵向由期望加速度调节控制。考虑到车辆行驶过程中实时性要求较高,采用计算量小、误差范围不宜过大的控制算法。因此,选用线性模型预测控制算法7进行模型转化、目标函数与约束设计。
2.2.1模型转化与模型预测
经过小角度假设与轮胎侧偏力线性化后的系统仍具有非线性因素,故采用状态轨迹线性化18方法对式(6)进一步线性化。为区分当前时刻与预测时刻,定义x(k|t)为系统在t时刻对k时刻状态量的预测,x(k+1t)为下一时刻状态量的预测值,且与x(klt)相差采样周期T。将式(7)中的非线性时变系统以当前时刻t的状态量xo(t)与控制量u₀(t)为工作点采用泰勒展开法线性化,并忽略二阶及以上高阶项,则有:
式中:xa(t),xa(t),ua(t)分别为x(t),x(t),u(t)对展开点的差值;A,为t时刻f对x的雅可比矩阵;B₁为t时刻f对u的雅可比矩阵;C为输出矩阵,恒不变。对线性时变系统采用前向欧拉法离散化,对每个采样时刻k有:
式中:I为单位矩阵;T为离散系统采样周期;A,Bt时刻对预测时刻k的变化矩阵,与预测时刻的状态量和控制量有关。进一步变换可得到:(14)式中:Dk=x₀(k+1|t)-Ax.x₀(k|t)-Buo(klt)。令
式中:Nx,Na分别为状态量与控制量维度;△u(klt)=u(kt)-u(k-1|t);心在每个采样时刻引入状态变化量△u(t)代替控制量u,对控制量的变化量进行控制,得到新的状态方程:
(16)
式中:;C=[c 0Naxw.]。在预测时域中,系统方程和输入方程的变化对实际效果影响较小,但对实时性影响较大19。为进一步降低计算复杂度,进行以下简化:
(17)
式中:Np为预测时域;Ne为控制时域,一般取Nelt;Np。根据上述推导,可得预测时域内的系统状态输出方程:
H,=W₁ξ(t|t)+O,△U(t)+F₁Φ,(18)
式中各矩阵如下:
式中N,为输出量维度。
2.2.2目标函数与约束
构建的控制器目标函数L如式(19)。
(19)
式中:diag(Q1,Q₂,…,Qx,)为构造权重Q1,Q₂,…,Qn,的对角矩阵;⊗表示克罗内克积;Her(t)为t时刻对各时域的状态参考值;Q为输出量的权重矩阵,反映状态输出量(纵向速度、横摆角、横向位移)偏差对目标参考值的权重;R为控制变化量的权重矩阵,反映系统对控制量(纵向期望加速度、前轮转角、后轮转角)变化的敏感程度;ε为松弛因子;c₈为权重系数。约束条件过于苛刻会导致可行域收缩,求解困难。为提高求解鲁棒性,确保多个约束条件下得出最优解,在目标函数中引入松弛因子ε作为软约束限制20,使求解极端情况下约束边界可被超越。
考虑到车辆行驶过程中的安全性与稳定性,对控制量、控制增量与状态量进行约束:
1)根据轮胎的侧偏特性,为保证其收敛于线性范围,对前后轮转角进行约束:
δmin≤|δ(k+i)|≤0max,i=0,1,…,Ne-1(20)
式中δmin,δmax为轮胎转角的最小值与最大值。为避免轮胎转角的突变影响系统稳定性,同时对转角变化量进行约束:
△0min≤|△δ(k+i|≤△0max,i=0,1,…,Ne-1(21)
式中:△δ为车轮转角变化量;△δmin,△δmax分别为变化量的最小值与最大值。
2)为保证行驶过程的平顺性,车辆纵向加速度不宜过大,同时为保证车辆纵向稳定性,对纵向期望加速度及其变化量进行约束:
(22)
式中:Xpmin,Xpmax为纵向期望加速度的最小值与最大值;△xp为期望加速度变化量;△xpmim,△xpma为期望加速度变化量的最小值与最大值。
3)为避免车辆行驶过程中,过大的纵向速度带来安全隐患,车辆速度应始终小于安全极限,因此对纵向速度进行约束:
xpmin≤|x(k+i)|≤xpmax,i=0,1,…,Np-1(23)式中Xpmin,Xpmax为纵向期望速度的最小值与最大值。
2.3纵向下位控制模块
文中车辆动力总成为双电机驱动,且前后电机的输出转矩相同,车辆纵向力学分析如下:
F₁-F₂=Fj+F₀+Fa(24)
式中:F₁为车辆驱动力;F₂为制动力;F;为加速阻力;
F₀为滚动阻力;Fa为空气阻力。
加速阻力为:
Fj=Cmmx
式中cm为车辆质量换算系数,可估算为1.031²1。
滚动阻力为:
式中:c₀为滚动阻力系数,与车辆自身属性与行驶速度有关。
空气阻力为:
(27)
式中:ca为空气阻力系数;S为车辆迎风面积;σ为空气密度;v为车辆与风的相对速度。
根据车辆所受的阻力,将下位控制模块分为驱动模式与制动模式,并根据以下规则切换逻辑:
(28)
式中:mode为控制模块的工作模式,分为驱动与制动模式。
在驱动模式下,车辆克服阻力做功,无制动力,根据期望加速度与车辆逆纵向动力学模型求解电机总驱动扭矩T₁:
(29)
式中:w为车轮滚动半径;ia为差速器传动比;ea为差速器机械效率;e为电机输出效率,可通过查电机效率MAP图22得到。
考虑到车辆速度变化时的载荷转移效应23,前后轴载荷动态分布如下:
(30)
式中:F₂为垂直载荷,F₂r,Fn为前轴与后轴的垂直载荷;h为车辆质心离地面的高度;I₁为质心到前轴的距离;l₂为质心到后轴的距离。将电机总驱动扭矩T₁按照垂直载荷比例分配至前轴电机T与后轴电机T₁₂:
(31)
在制动模式下,车轮提供的制动力与阻力一同构成合力作用于速度,制动合力矩T₂可表示为:
T₂=w(F₃-F₀-Fa)(32)
不考虑机械制动与电机能量回收制动切换策略,将总制动力矩T₂按照垂直载荷比例分配至前后轴:
(33)
3仿真验证与对比分析
3.1仿真平台与主要参数
为验证仿真结果的有效性,选用CarSim与Matlab/Simulink联合仿真。整车与MPC控制模块相关参数分别如表1,2。
考虑到仿真结果的可对比性,设计3种控制器仿真对象,如表3。
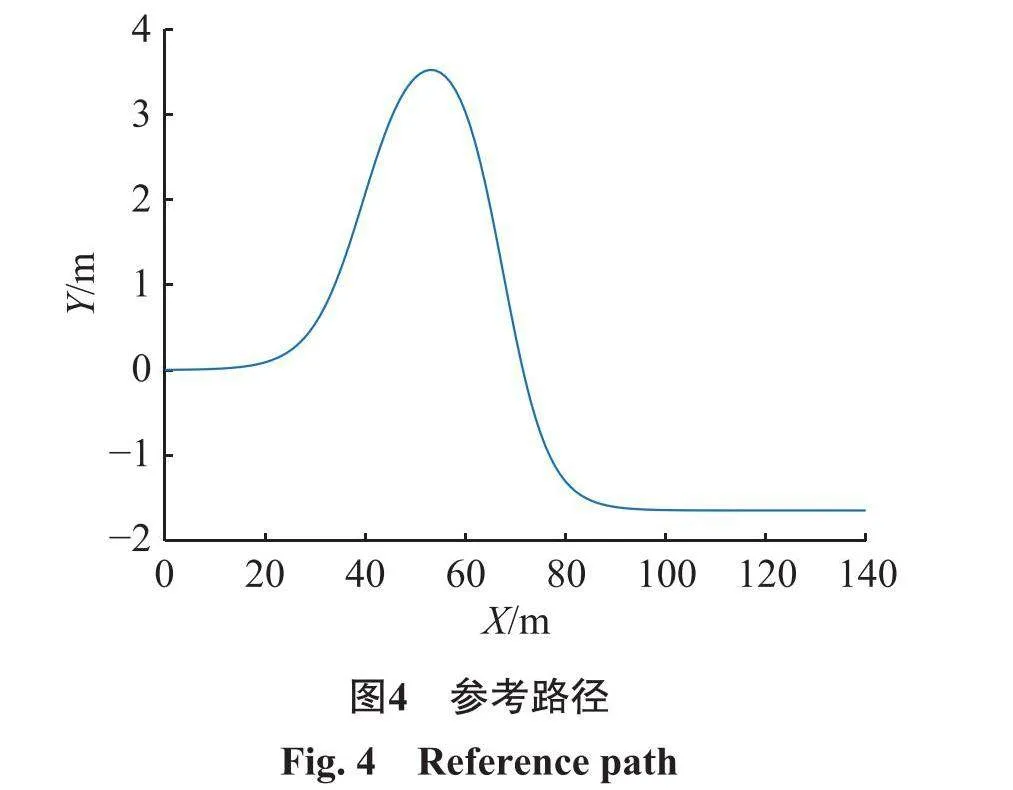
对象1,选用4WS横纵向控制器与速度调节,参考速度为72.0 km/h;对象2,在对象1的基础上禁用速度调节,设定恒定速度为对象1的平均速度56.6 km/h;对象3,使用4WS横纵向控制器,禁用后轮转向。选取双移线工况24测试车辆仿真道路,纵向长度为140 m,参考路径21如图4。
3.2安全速度约束
根据上述安全速度约束算法,将参考速度设定为72.0 km/h,并以1m为间隔对参考路径进行采样,得到安全速度p与参考路径纵向位移X之间的关系,如图5。
其中,参考速度为控制规划层规定的速度;原始速度根据式(8)计算得到;目标速度通过本文算法得到。
3.3仿真结果与分析
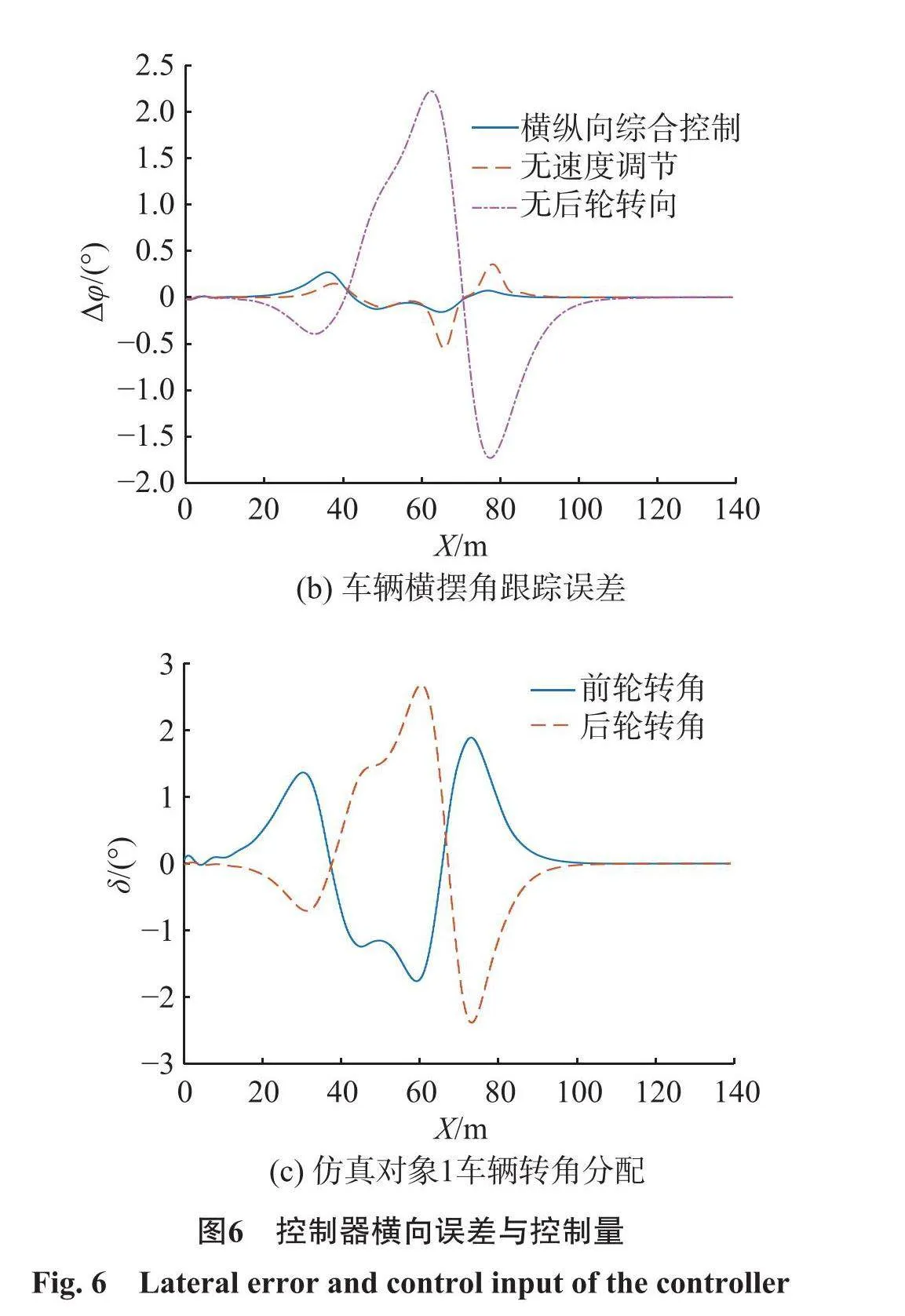
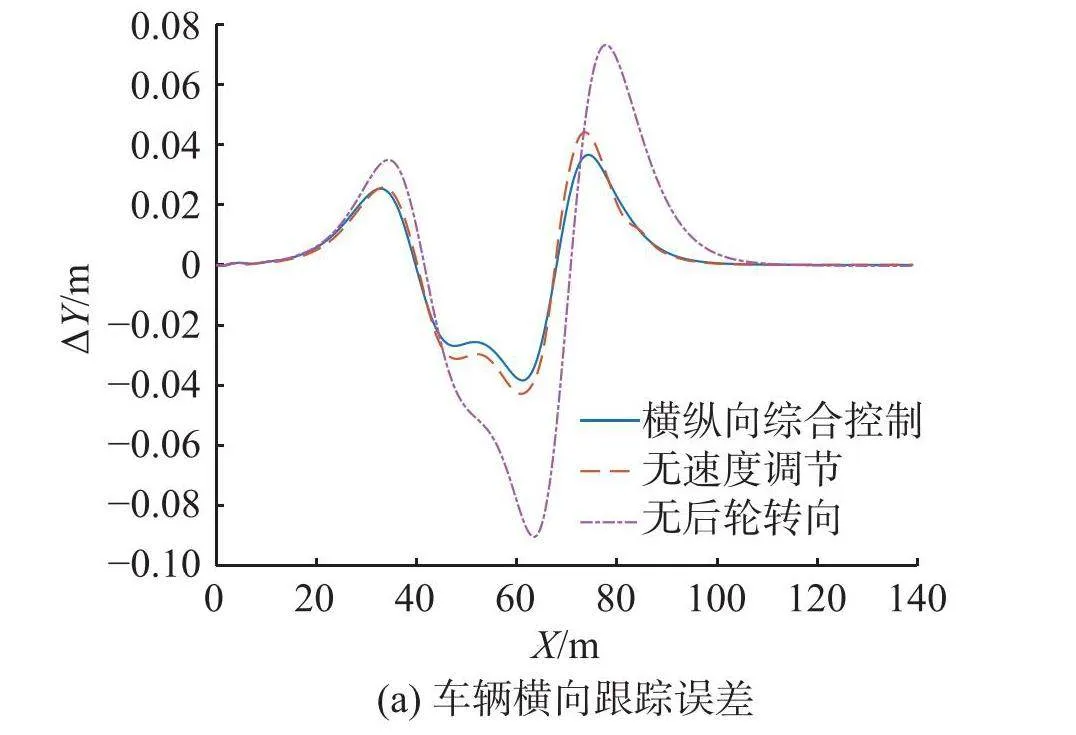
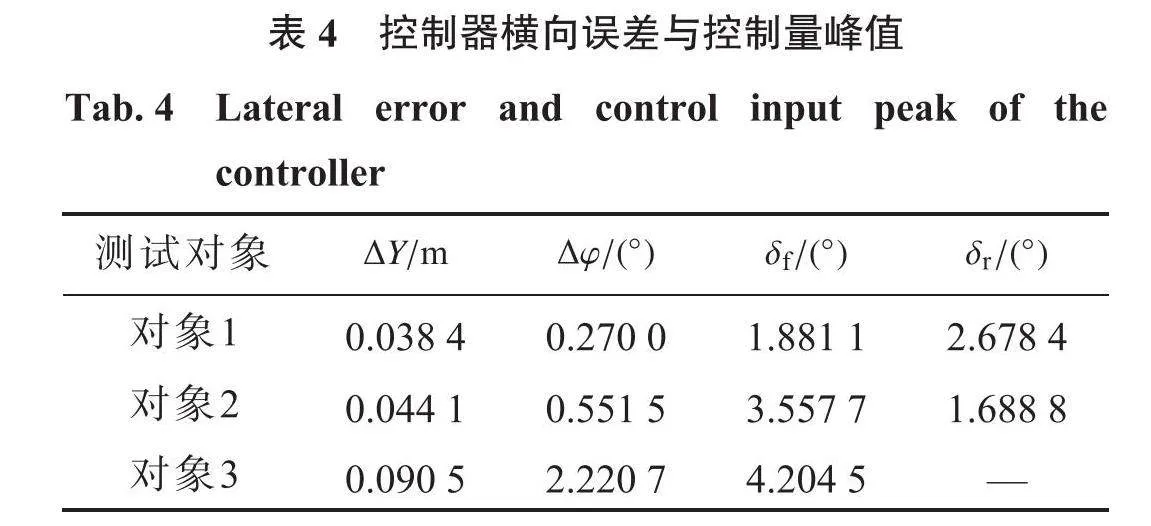
横向跟踪误差与控制量如图6,峰值数据如表4。
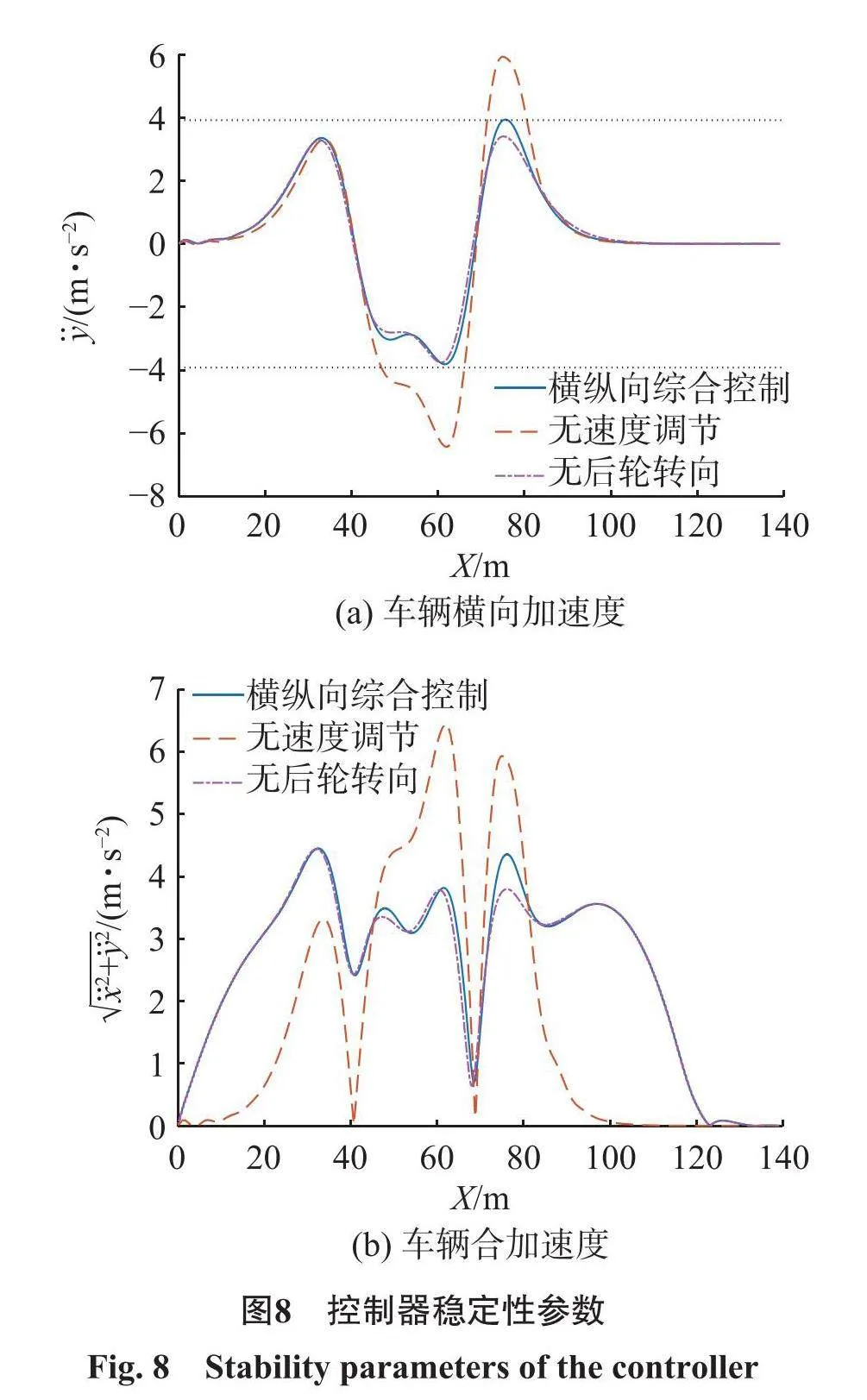
由图6(a),(b)与表4可看出:3种控制策略均能够完成双移线工况测试,其中对象1的各项跟踪性能最好,当车辆经过曲率极大值点,各项跟踪误差均达到极大值;对象2误差最显著,表明纵向速度与曲率对跟踪精度有较大影响;与对象3相比,对象1各项跟踪精度较好,表明设计的4WS横纵向综合控制器能够一定程度提高跟踪精度;与对象2相比,对象1与对象3在曲率最大点速度较小,有效降低了横向与横摆角跟踪误差,表明合理的速度调节能够有效改善跟踪精度。由图6(c)与表4可知:整个过程中对象1的车轮转角始终工作在线性范围,未触及控制器约束边界,处于线性范围。对象1的纵向跟踪误差与控制量如图7,其峰值数据如表5。
由图7与表5可看出:对象1与对象3能够较为精准地跟踪目标速度,且纵向下位控制模块能够较好地跟踪纵向期望加速度,表明逆纵向模型的设计是可行的;加入后轮转向对速度跟踪的精度影响不大;此外由于文中考虑了静态与纵向载荷转移效应,驱动扭矩与制动力矩按比例进行了分配。
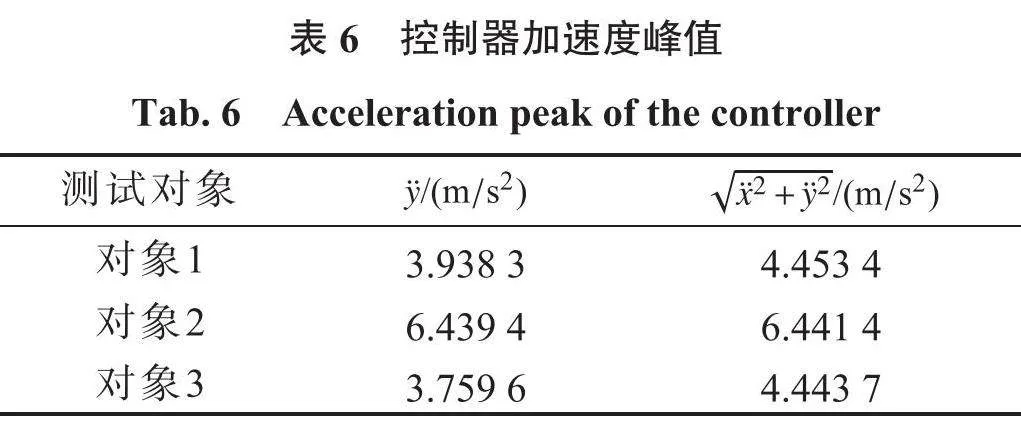
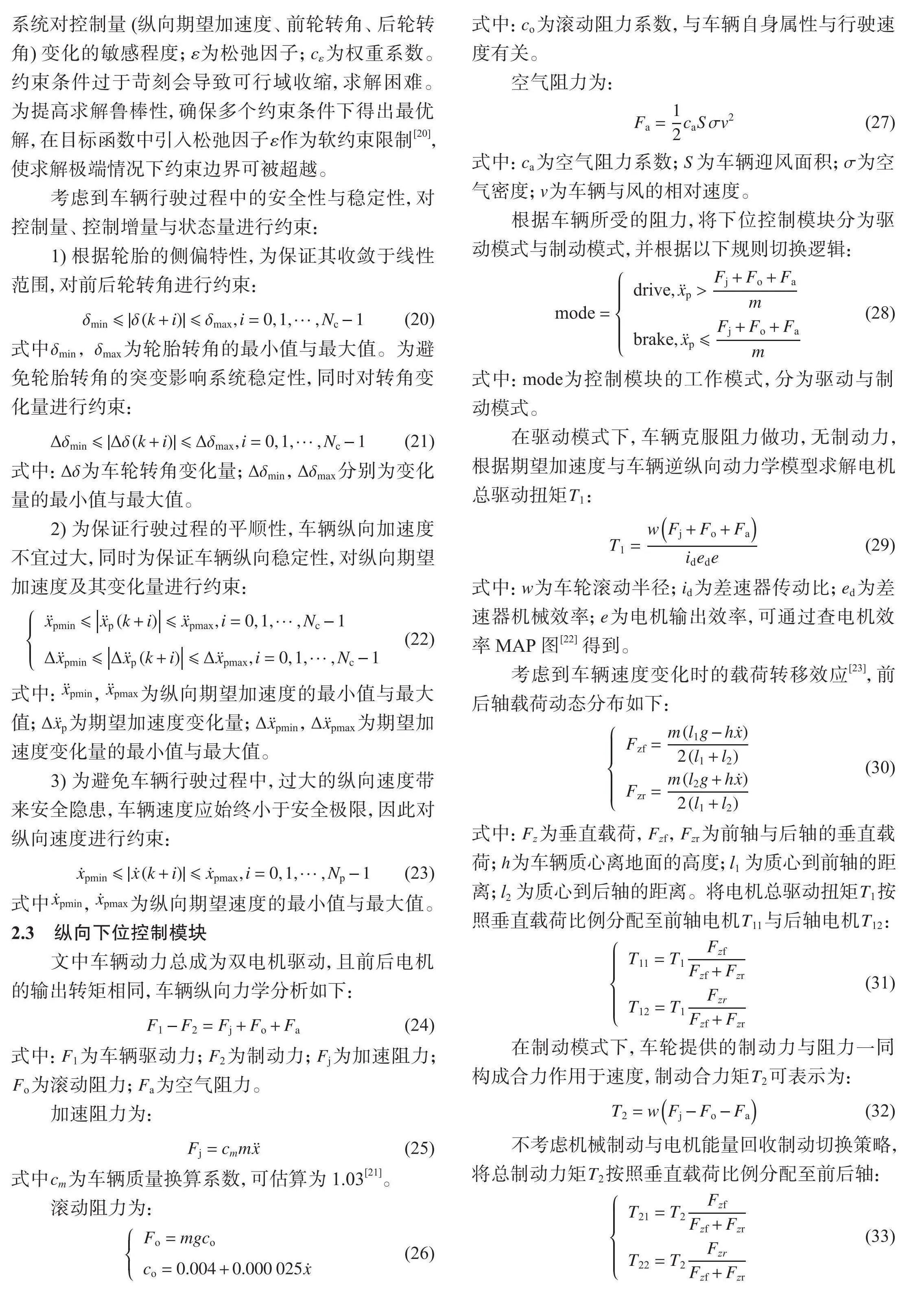
横向加速度与合加速度如图8,其峰值如表6。
由图8与表6可知:4WS横纵向综合控制器的最大侧向加速度控制在0.4g,保证了车辆侧向稳定,并且合加速度始终处于μg内,表明上述安全速度约束算法是可行的;对象2未使用速度调节,车辆经过曲率极值点时合加速度达到峰值,对象1与对象3加入速度调节后能够有效减小峰值,表明适当地减速能够提高车辆稳定性,引入安全速度约束算法是有效且有必要的。
为比较控制器的实时性,将横向与纵向控制拆分为独立且参数相同的MPC控制模块,并将每轮迭代时间相加,结果如图9与表7。
综合图9与表7可看出:除部分时刻的尖刺,综合控制的平均迭代时间比独立控制缩短了29.1%,有效提高了控制的实时性。
4结论
以车辆动力学模型为基础,设计考虑侧向稳定性的4WS横纵向综合控制器。根据道路曲率与侧向加速度计算安全速度,并将4WS车辆的横向、纵向模型集成在同一控制模块中,在横纵向同时约束下使用模型预测控制算法跟踪路径与安全速度,求得最后前后轮转角与纵向期望加速度;对于纵向下位控制模块,由纵向期望加速度计算得到电机扭矩与车轮制动力矩。为保证实验结果的可对比性,设计3种控制策略的仿真对象:4WS横纵向综合控制器+速度调节、4WS横纵向综合控制器+恒定速度以及FWS横纵向综合控制器+速度调节。结果表明:3种控制策略均能完成仿真,其中对象1(本文提出的控制策略)的跟踪效果最佳,横向跟踪误差不超过0.0384m、横摆角跟踪误差不超过0.27°、速度跟踪误差不超过0.0973 km/h,满足精度要求;车轮转角均远低于约束边界,轮胎侧偏力处于线性范围;侧向加速度峰值不超过0.4g,此外车辆合加速度被控制在μg内,满足稳定性要求;相比横纵向独立控制器,设计的综合控制器的迭代时间降低了29.1%,可满足控制的实时性要求。
参考文献:
[1]李学整,汪怡平,苏楚奇,等.智能车辆路径跟踪控制方法[J].控制与决策,2024,39(1):143-150.
[2]TANGXZ,SHI LF,WANG B,etal.Weight adaptive path tracking control for autonomous vehicles based on PSO-BP neural network[J].Sensors,2023,23:412.
[3]SHIK,YUAN X,HE Q.Double-layer dynamic decoupling control system for the yaw stability of four wheel steering vehicle[J].Control,Automation and Systems,2019,17(5):1255-1263.
[4]高晋,杨宝珠.基于LTV-MPC的主动四轮转向控制策略研究[J].重庆理工大学学报(自然科学版),2023,37(12):18-27.
[5]胡红元,李兵,王阳阳.汽车四轮转向技术研究综述[J].上海汽车,2021(4):19-23.
[6]陈俐,李雄,程小宣,等.汽车线控转向系统研究进展综述[J].汽车技术,2018(4):23-34.
[7]石沛林,蒋军锡,侯建伟,等.考虑行驶稳定性的四轮转向车辆路径跟踪控制研究[J].广西大学学报(自然科学版),2021,46(3):606-614.
[8]邓召文,易强,高伟,等.四轮转向汽车闭环LQR控制仿真研究[J].机械设计与制造,2022(1):20-25.
[9]CHEN S P,XIONG G M,CHEN HY,etal.MPC-based path tracking with PID speed control for high-speed autonomous vehicles considering time-optimal travel[J]Journal of Central South University,2020,27(12):3702-3720
[10]张平,江书真,陈一凡,等.基于横纵向综合控制的智能汽车路径跟踪[J].重庆交通大学学报(自然科学版),2023,42(4):153-160.
[11]邓涛,李鑫.智能车辆横纵向运动综合控制方法研究[J].重庆交通大学学报(自然科学版),2021,40(4):133-140.
[12]孔慧芳,朱文祥,张倩.考虑道路曲率的智能车辆路径跟踪模型预测控制[J/OL].机械科学与技术,[2024-07-04].https://doi.org/10.13433/j.cnki.1003-8728.20230303.
[13]王姝,张海川,赵轩,等.融合稳定性的分布式驱动电动汽车路径跟踪控制策略研究[J].中国机械工程,2023,34(9):1035-1044.
[14]FU T F,YAO C W,LONG M H,etal.Overview of longitudinal and lateral control for intelligent vehicle path tracking[J].Springer Link,2023,586:891-902.
[15]熊坚,何扬帆,刘果,等.智能车辆弯道速度与转向自适应耦合控制[J].昆明理工大学学报(自然科学版),2024,49(2):161-170
[16]向婧燕,周奎,付勇智,等.考虑稳定性的4WD/4WS无人车路径跟踪控制策略研究[J].计算机工程与应用,2024,60(6):349-358.
[17]YE B L,NIU S F,LI L G,etal.A comparison study of kinematic and dynamic models for trajectory tracking of autonomous vehicles using model predictive control[J]Control Autom Syst,2023,21:3006-3021.
[18]张维刚,张朋,韦昊,等.一种基于LTVMPC改进的无人驾驶汽车路径跟踪控制算法[J].湖南大学学报(自然科学版),2021,48(10):67-73.
[19]张亮修,吴光强,郭晓晓.自主车辆线性时变模型预测路径跟踪控制[J].同济大学学报(自然科学版),2016,44(10):1595-1603
[20]谢宪毅,金立生,杜军彪,等.基于MPC的自动驾驶汽车轨迹跟踪控制[J].机械设计,2024,41(S1):20-26.
[21]余才光,高上览,汤伟诚,等.纯电动汽车电耗分析及未来电耗推测[J].制造业自动化,2024,46(1):191-198.
[22]SUN P,TRIGELL A S,DRUGGE L,etal.Energy efficiency and stability of electric vehicles utilising direct yaw moment control[J].VehicleSystem Dynamics,2020(12):1-21.
[23]张玮,高爱云,付主木,等.计及质心侧偏角动态自适应的无人驾驶汽车横坡弯道跟踪控制[J].中国机械工程,2024,35(6):962-972.
[24]DAOUD M A,MEHREZ M W,RAYSIDE D,etal.Simultaneous feasible local planning and path-following control for autonomous driving[J].IEEE Transactions onIntelligent Transportation Systems,2022,21:3006-3021.
责任编辑:何莉
