轮毂电机倾斜偏心下的电动汽车动力学负效应
2024-12-03邓召学秦瀚笙罗晓亮马天骥









摘 要:为了研究开关磁阻电机倾斜气隙偏心产生的不平衡径向电磁力对电动汽车横向动力学的负效应,提出电机倾斜偏心下的不平衡电磁力建模方法。首先,根据麦克斯韦应力法和气隙磁导修正系数计算倾斜偏心下的不平衡电磁力,并设计实验台架对其进行测量。然后,建立轮毂电机驱动的电动汽车动力学模型,通过设定角阶跃转向工况和鱼钩转向工况分析倾斜偏心对车辆动力学负效应的作用机理。结果表明,倾斜偏心产生的不平衡电磁力会以力矩的形式作用于车轮,车辆转向时由于不平衡电磁力的干扰,其行驶轨迹会偏离驾驶员预期。更为重要的是,极限工况下倾斜偏心产生的不平衡电磁力会降低车辆的抗侧翻特性,紧急转向时会增大车辆侧翻的可能性,严重威胁驾驶员的行车安全。
关键词:车辆动力学;负效应;电机;倾斜偏心;电磁力;操纵稳定性
DOI:10.15938/j.emc.2024.10.012
中图分类号:TM352
文献标志码:A
文章编号:1007-449X(2024)10-0123-12
收稿日期: 2023-06-27
基金项目:国家自然科学基金(52072054);汽车运输安全保障技术交通运输行业重点实验室(长安大学)开放基金(300102222504);重庆市教育委员会科学技术研究项目(KJQN202100728)
作者简介:邓召学(1985—),男,博士,副教授,研究方向为轮毂电机及其控制、电机优化设计;
秦瀚笙(1998—),男,硕士,研究方向为轮毂电机及其控制;
罗晓亮(1997—),男,硕士,研究方向为轮毂电机优化设计;
马天骥(1999—),男,硕士研究生,研究方向为轮毂电机优化设计。
通信作者:邓召学
Negative dynamic effect of electric vehicle under tilted eccentricity of hub motor
DENG Zhaoxue, QIN Hansheng, LUO Xiaoliang, MA Tianji
(School of Mechatronics and Vehicle Engineering, Chongqing Jiaotong University, Chongqing 400074, China)
Abstract:In order to study the negative effect of the unbalanced radial electromagnetic force caused by the tilted air gap eccentricity of switched reluctance motor on the lateral dynamics of electric vehicles, a modeling method of the unbalanced electromagnetic force under the tilted eccentricity of the motor was proposed. Firstly, the unbalanced electromagnetic force under inclined eccentricity was calculated according to the Maxwell stress method and the air-gap permeability correction coefficient, and the experimental bench was designed to measure it. Then, the dynamic model of electric vehicle driven by wheel hub motor was established, and the mechanism of the negative effect of tilt eccentricity on vehicle dynamics was analyzed by setting the angle step steering condition and the fishhook steering condition. The results show that the unbalanced electromagnetic force produced by the tilt eccentricity will act on the wheel in the form of torque, and the vehicle will deviate from the driver’s expectation due to the interference of the unbalanced electromagnetic force. More importantly, the unbalanced electromagnetic force generated by tilt eccentricity under extreme working conditions will reduce the anti-rollover characteristics of the vehicle, and increase the possibility of rollover when emergency steering, which seriously threatens the driver’s driving safety.
Keywords:vehicle dynamics; negative effect; motor; tilted eccentricity; electromagnetic force; handing stability
0 引 言
随着全球科学技术的革新,汽车产业逐步由燃油化转向电动化。轮毂驱动技术凭借各轮转矩独立可控且响应迅速的优势被视为电动汽车的最终驱动形式[1-2]。开关磁阻电机采用硅钢制造,成本低廉且具有转速调节范围宽和转矩密度高的优势,因此在电动汽车驱动电机领域得到了广泛关注[3]。
电动汽车的实际行驶过程中,轮毂电机气隙会由于轮胎载荷转移和车身姿态的变化出现水平、倾斜等不同类型的偏心状态。电机轴向或周向的气隙长度分布不均导致电机电磁力失衡,恶化车辆动力学性能[4]。
电磁力失衡主要归结于电机气隙的偏心。对此,文献[5]结合气隙磁导修正系数推导偏心下的径向电磁力,并对电磁力的空间分布与阶次进行探究。文献[6]从气隙偏心下的开关磁阻电机径、切向磁通密度变化规律出发,探究电磁力的空间特性,并分析凸极宽度对电磁力的影响规律。文献[7]通过采用有限元法建立电机振动动力学方程,通过麦克斯韦应力法结合等效磁路积分推导径向力公式。在以往的研究中,水平气隙偏心下开关磁阻电机径向电磁力的计算方法丰富。但对倾斜气隙偏心下径向电磁力的研究相对较少。
明确气隙偏心对电动汽车动力学负效应的影响机理具有重要意义。近年来,针对路面激励、气隙偏心和不平衡电磁力之间的耦合关系引发的电动汽车平顺性负效应,众多研究人员做了大量研究[8-9]。例如,文献[10]解析研究了开关磁阻电机垂向力和路面激励对电动汽车振动的耦合影响。文献[11]建立多自由度耦合动力学模型,研究2种工况下不平衡电磁力对车辆垂向和侧向耦合动力学的影响。由此可见,轮毂电机水平气隙偏心产生的不平衡电磁力对车辆平顺性具有较大的影响,但造成电动汽车动力学负效应的因素不仅包含水平偏心,由行驶工况变化导致的倾斜气隙偏心也应着重考虑。
针对上述研究的不足,本文着重考虑电机倾斜偏心下的径向电磁力。通过麦克斯韦张量法与气隙磁导修正系数计算倾斜偏心下的径向电磁力,并利用设计的测量装置对计算结果进行验证。然后,基于轮毂电机驱动系统的横摆位移关系,建立轮毂电机驱动车辆动力学模型。进而,通过设定转角阶跃和鱼钩转向激励,探究电动汽车在转向时径向电磁力对动力学的影响特性。
1 轮毂电机径向电磁力解析建模
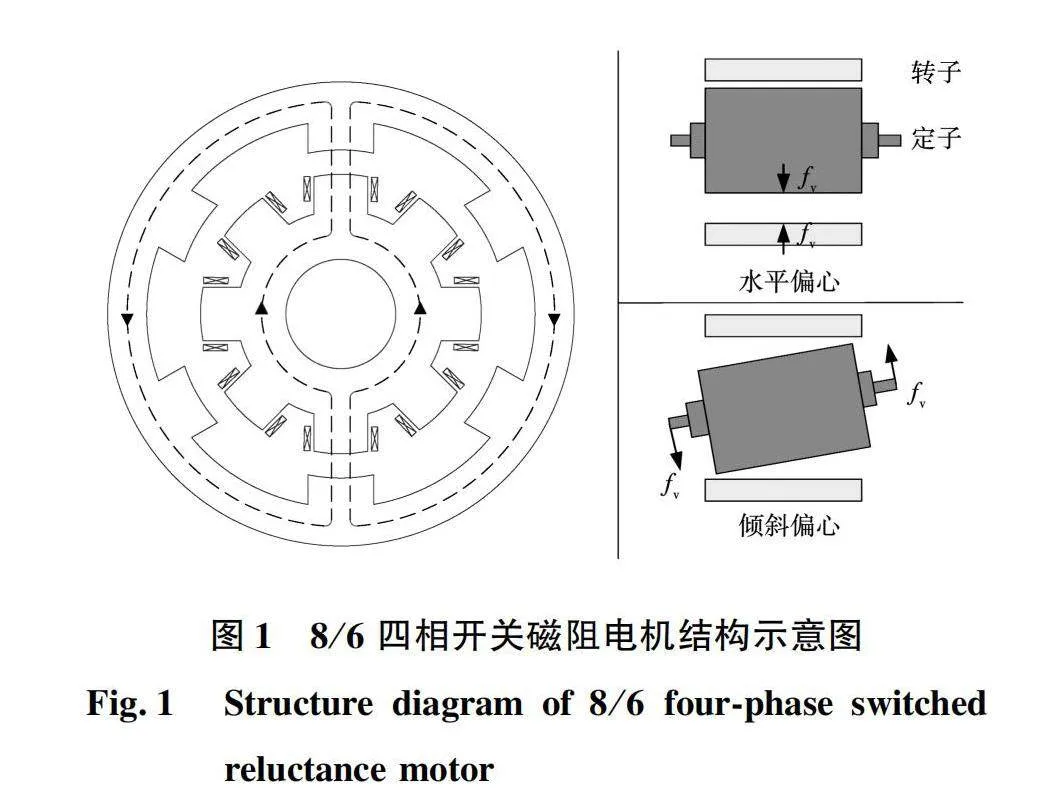
本研究中选用的开关磁阻电机结构如图1所示,电机的主要参数见文献[12]。其主要由外转子、内定子、绕组线圈和支撑轴组成。
1.1 麦克斯韦应力法
麦克斯韦应力法将磁场的有质动力归结为与磁力线方向一致的张力和垂直于磁力线方向的侧压力[13]。因此,径向电磁力可表示为
式中:μ0为空气磁导率;Br为径向磁通密度;Bt为切向磁通密度;A为定子凸极曲面面积。
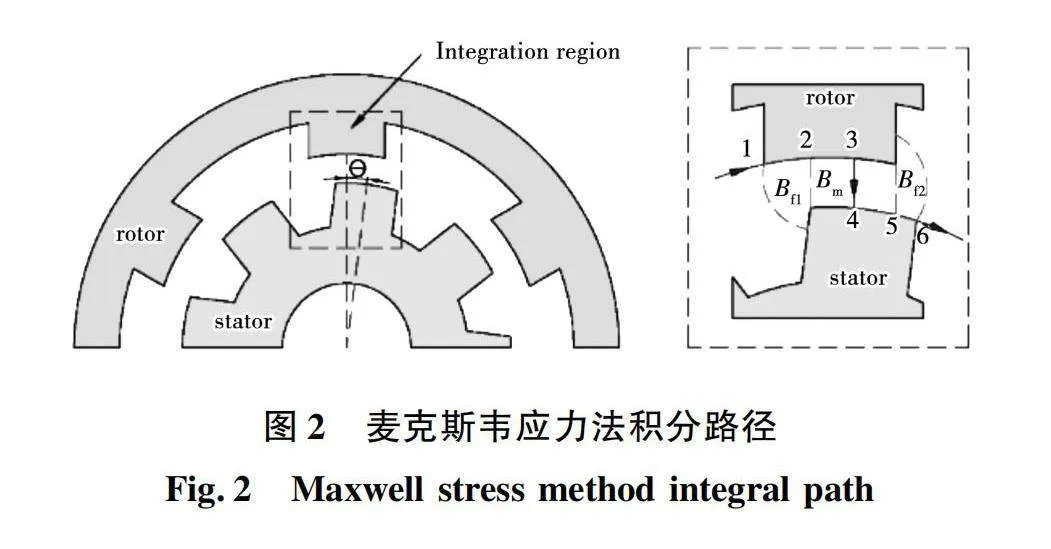
麦克斯韦应力法积分路径如图2所示,依据图2所示的积分路径,径向电磁力可进一步表示为
式中:h为转子轴向长度;Bm为开关磁阻电机主气隙磁通密度;Bf1、Bf2均为边缘磁通密度。
磁通密度的获取是计算径向电磁力的关键,考虑材料磁饱和的磁化曲线拟合公式可表示为
式中:μr为材料相对磁导率;Bsat为材料饱和磁通密度;Hs为磁场强度。由于电机两侧边缘磁通密度近似相等,因此只需要计算Bm和Bf1。
电机凸极交叠部分的磁路方程可表示为:
电机凸极非交叠部分的磁路方程可表示为:
式中:Nm为绕组匝数;im为绕组电流;Hg和Hf1分别为主气隙磁场强度和边缘磁场强度;lf1为边缘磁通路径的平均长度;L为定子轭部到转子轭部的距离;Lg为气隙长度。在假设边缘磁通路径为圆形轨迹的前提下,lf1=Lg+πrθ/4。
联立式(3)~式(5)并化简,可将电机的主气隙磁通密度和边缘磁通密度表示为:
式中:μ=μrμ0;em=l+Lg/L;lm=L+μr/emμ0;ef=1+lf1/L;lf=1+μlf1/efμ0;U=Nmim。
根据电机气隙长度以及相关结构参数可将积分路径分段表示为:
进一步将式(6)~式(8)代入式(2),可得电流与转子角度共同作用下的径向电磁力为
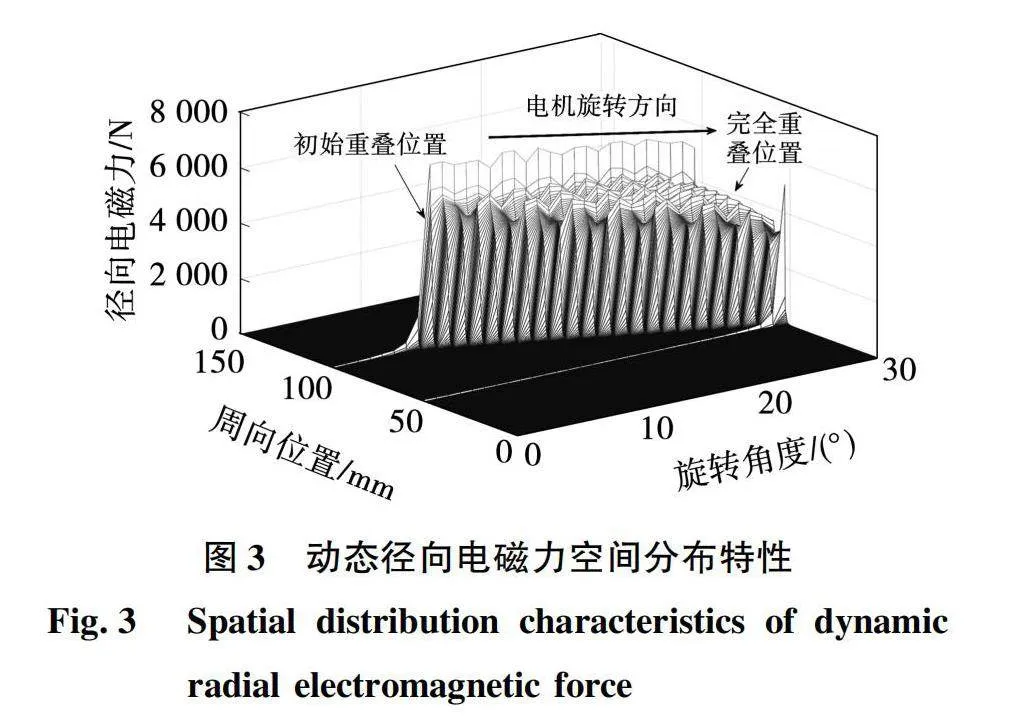
电机定、转子凸极由非对齐位置旋转至对齐位置时,径向电磁力的空间分布如图3所示。当电机运动到定、转子凸极的初始重叠位置,径向电磁力将突变到某一峰值。当电机继续向定、转子凸极的完全重叠位置运动,径向电磁力幅值呈下降趋势。整个旋转过程中电磁力波动现象一直存在,这是造成电机振动噪声的主要原因。
1.2 气隙磁导修正
开关磁阻电机发生倾斜偏心时,气隙磁通密度将因气隙磁导的变化而受到影响,为准确计算倾斜偏心下的径向电磁力需引入气隙修正系数。将电机气隙长度沿周向位置的分布表示为
式中σ为电机的周向位置,且满足0°≤σ≤360°。同时,电机气隙磁导分布函数满足:
式中:Λc=μ0/Lg为无偏心下的气隙磁导系数;e=Δg/Lg为气隙偏心系数。
定义εs=1/(1-ecosσ)为倾斜偏心下的气隙磁导修正系数,通过傅里叶级数对其展开可表示为
当k≥2时,气隙修正系数εs的值相对于k=0或k=1时很小,可忽略不计。则气隙修正系数可表示为
进一步,开关磁阻电机倾斜偏心下的径向电磁力可表示为
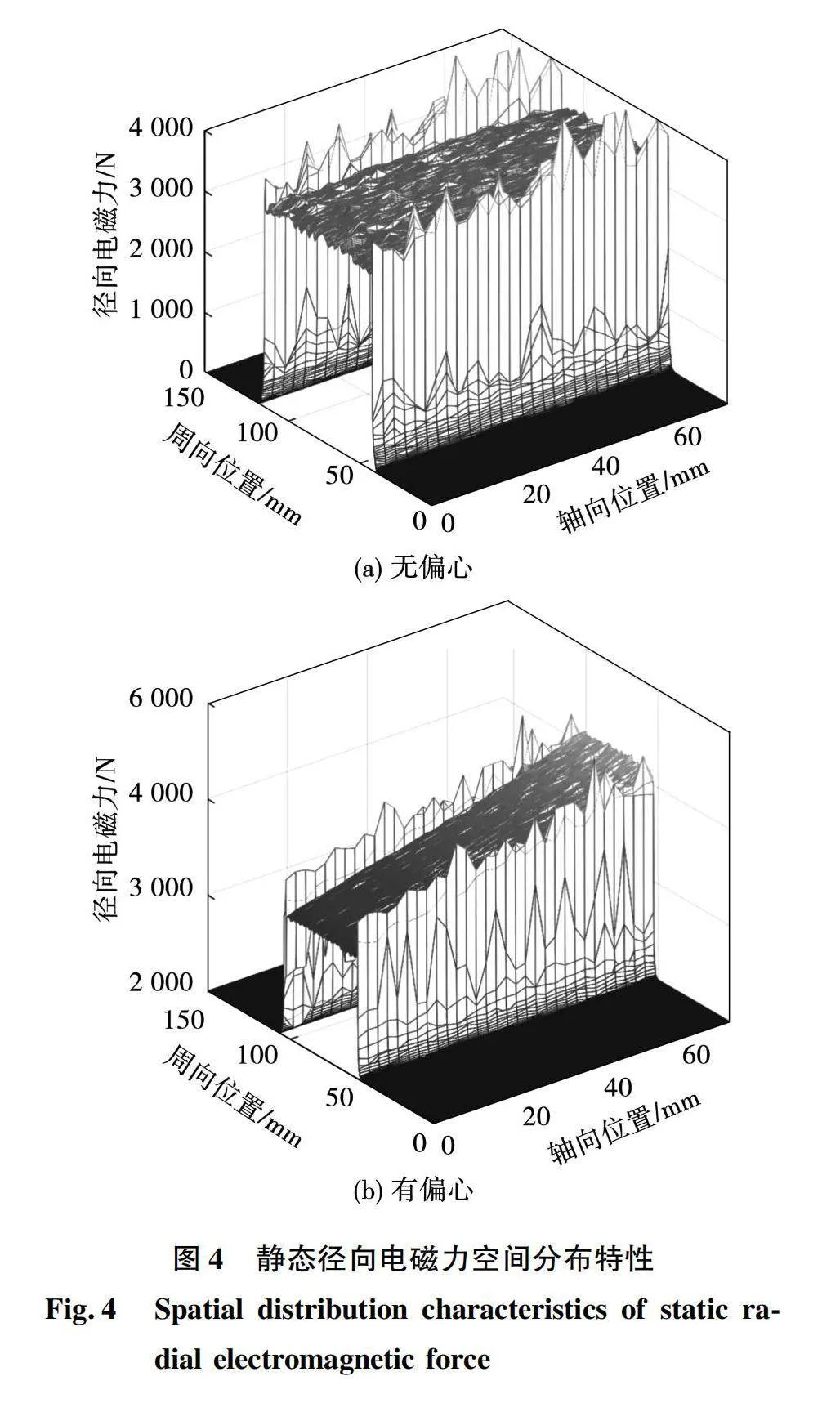
基于麦克斯韦应力张量与气隙磁导修正系数,在无偏心两种状态下开关磁阻电机的凸极径向电磁力空间分布如图4所示。径向电磁力沿凸极中心线呈现对称波动分布,且在凸极周向边缘峰值存在突变。
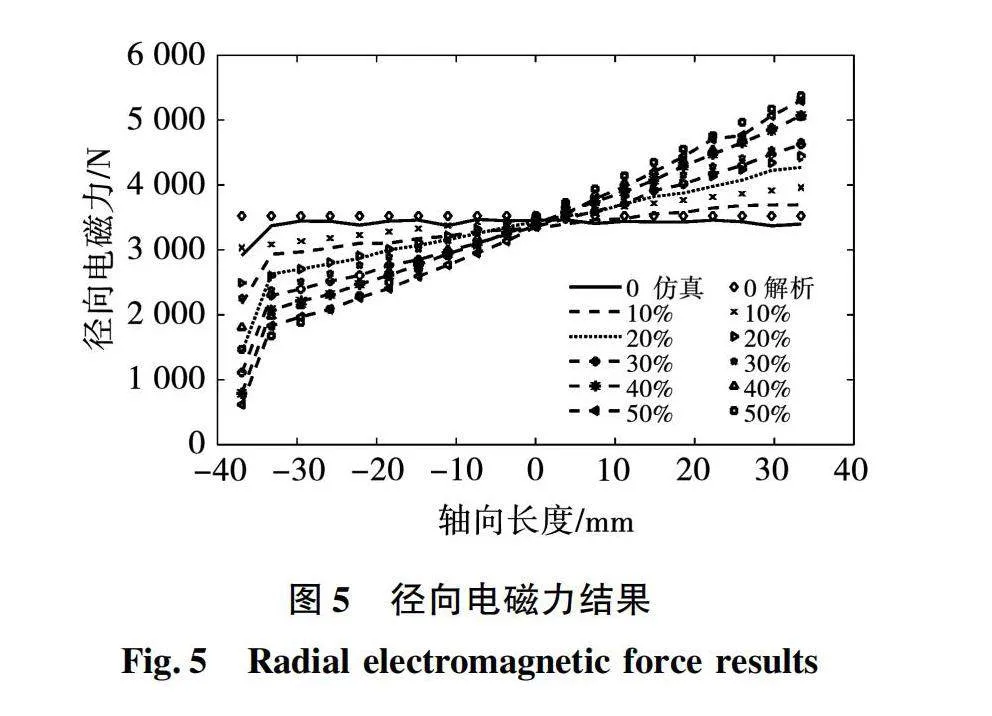
进一步,为有效分析不同倾斜气隙偏心下的径向电磁力,忽略凸极边缘电磁力峰值的突变效应,选取电机凸极中心线为基准对径向电磁力进行计算,其结果如图5所示。径向电磁力沿轴向呈现近似线性变化,无偏心时径向电磁力为固定值。径向电磁力的轴向分布失衡程度与倾斜偏心呈正相关耦合效应。
1.3 径向电磁力测量验证
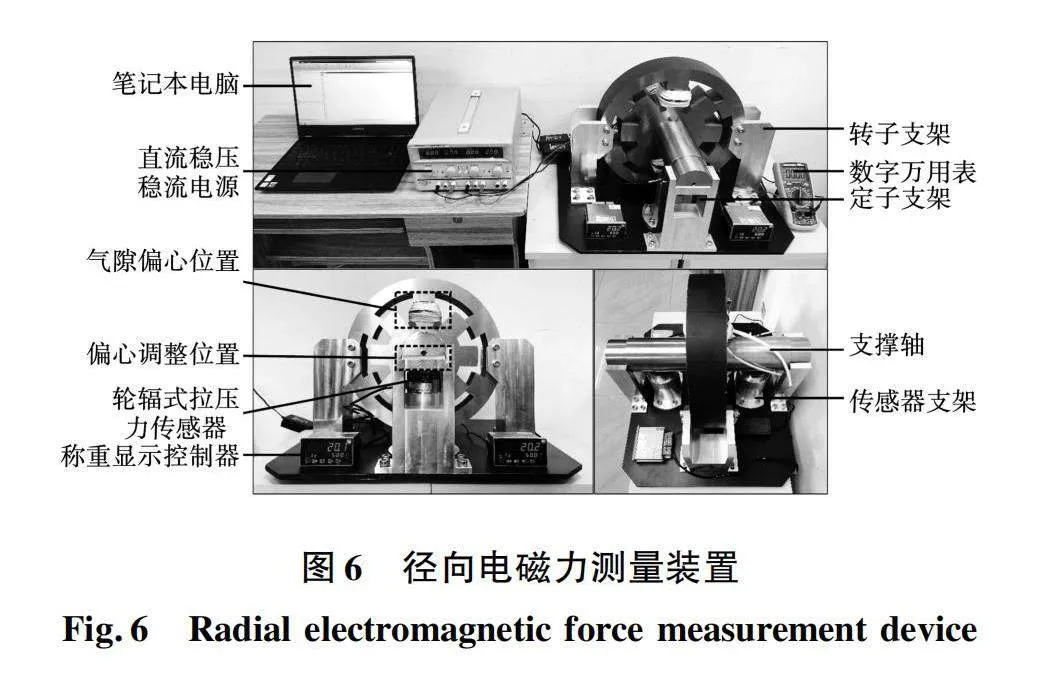
根据试验要求加工台架底板、转子支架、定子支架、传感器支架、支撑轴及开关磁阻电机等部件,完成试验台架的搭建。开关磁阻电机径向电磁力测量器械包括多路直流稳压稳流电源、轮辐式拉压力传感器、称重显示控制器、传感器压力压点、数字万用表、DCC电力测试线、高精度塞尺、笔记本电脑等器械。
设置垂直方向为试验测量的电机偏心方向,定子偏心率的大小由连接在定子支架上的螺栓调节,通过将螺栓的周向旋转运动转换为竖直方向上的直线运动调整定子偏心率大小。为保证径向电磁力测量结果准确性及消除开关磁阻电机绕组线圈间互感现象,仅在电机定子偏心位置缠绕纯铜漆包线至目标匝数。基于试验方法完成台架部件和测量器械装配,所搭建的开关磁阻电机径向电磁力测量台架如图6所示。
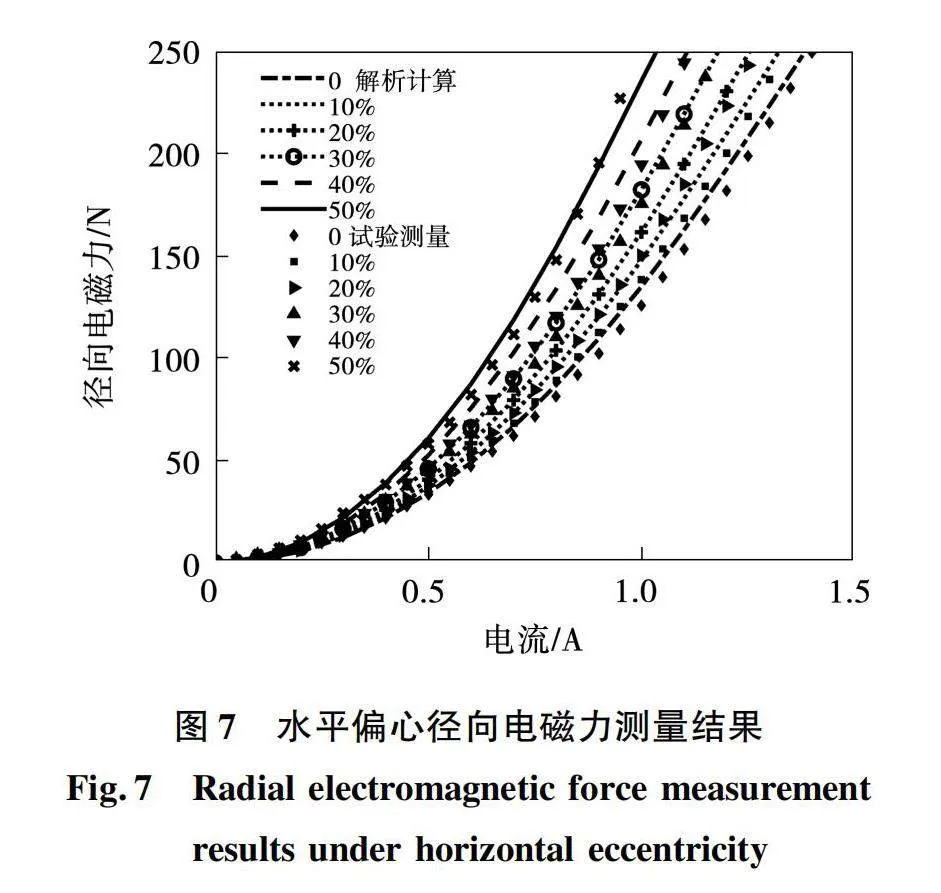
根据所搭建的试验台架可对开关磁阻电机径向电磁力进行测量,本文所设计的径向电磁力测量台架的测量阈值为250 N。通过改变电流对不同转子偏心下的电机径向电磁力进行测量,所得结果如图7所示。从图中可以看出,不同转子水平偏心下的径向电磁力试验测量结果与有限元法获取的结果能够较好吻合,进一步验证了本文所提径向电磁力解析模型的有效性。
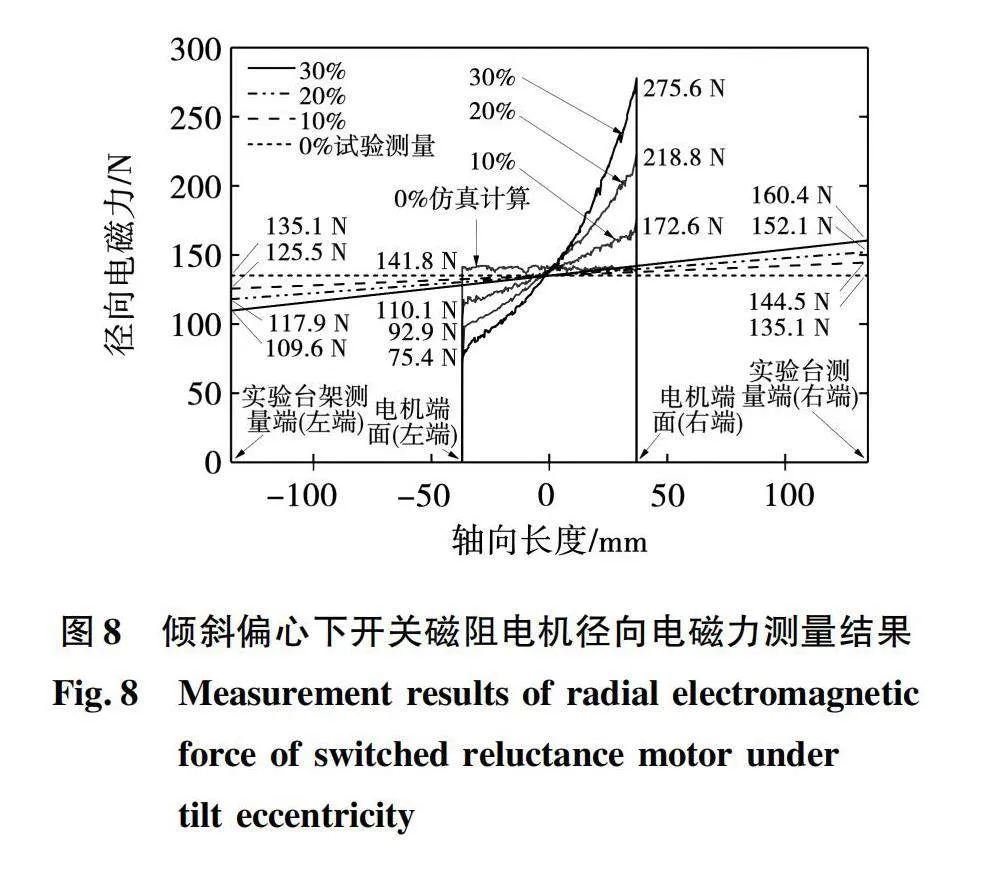
计算转子倾斜偏心下的不平衡径向力时,设定绕组电流为1 A的恒定电流激励。转子不同倾斜偏心率下的径向电磁力测量结果如图8所示。图中所示虚线两端为拉压力传感器轴向布置位置,梯形部分两端为电机实际轴向端面。
进一步,转子不同倾斜偏心率下的不平衡径向力矩结果可通过下式计算:
式中:Fe和F0分别为转子倾斜偏心和无偏心的径向电磁力试验测量结果;fe和 f0分别为转子倾斜偏心下和无偏心下的有限元仿真结果;l′为试验台架左、右传感器安装位置所构成的直线,其距离为135 mm;l为电机两轴向端部所构成的直线,其距离为74 mm。
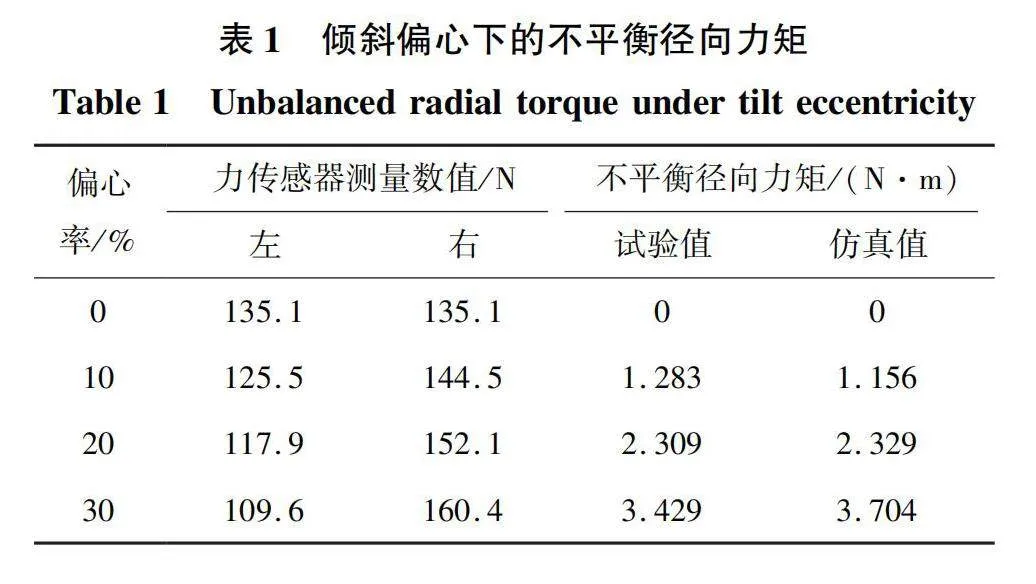
考虑开关磁阻电机径向电磁力试验台架测量阈值,将倾斜偏心率设置在30%内以保证测量结果的准确性。根据式(15)计算得到转子倾斜偏心下的电机不平衡径向力矩结果如表1所示,不平衡径向力矩试验测量结果与有限元仿真结果吻合较好。综上所述,该试验台架可以有效实现开关磁阻电机不平衡径向力的测量。
2 车辆动力学模型
2.1 轮胎模型
通过采用魔术公式轮胎模型获取轮胎的纵、侧向力特性[14],其一般表达式为
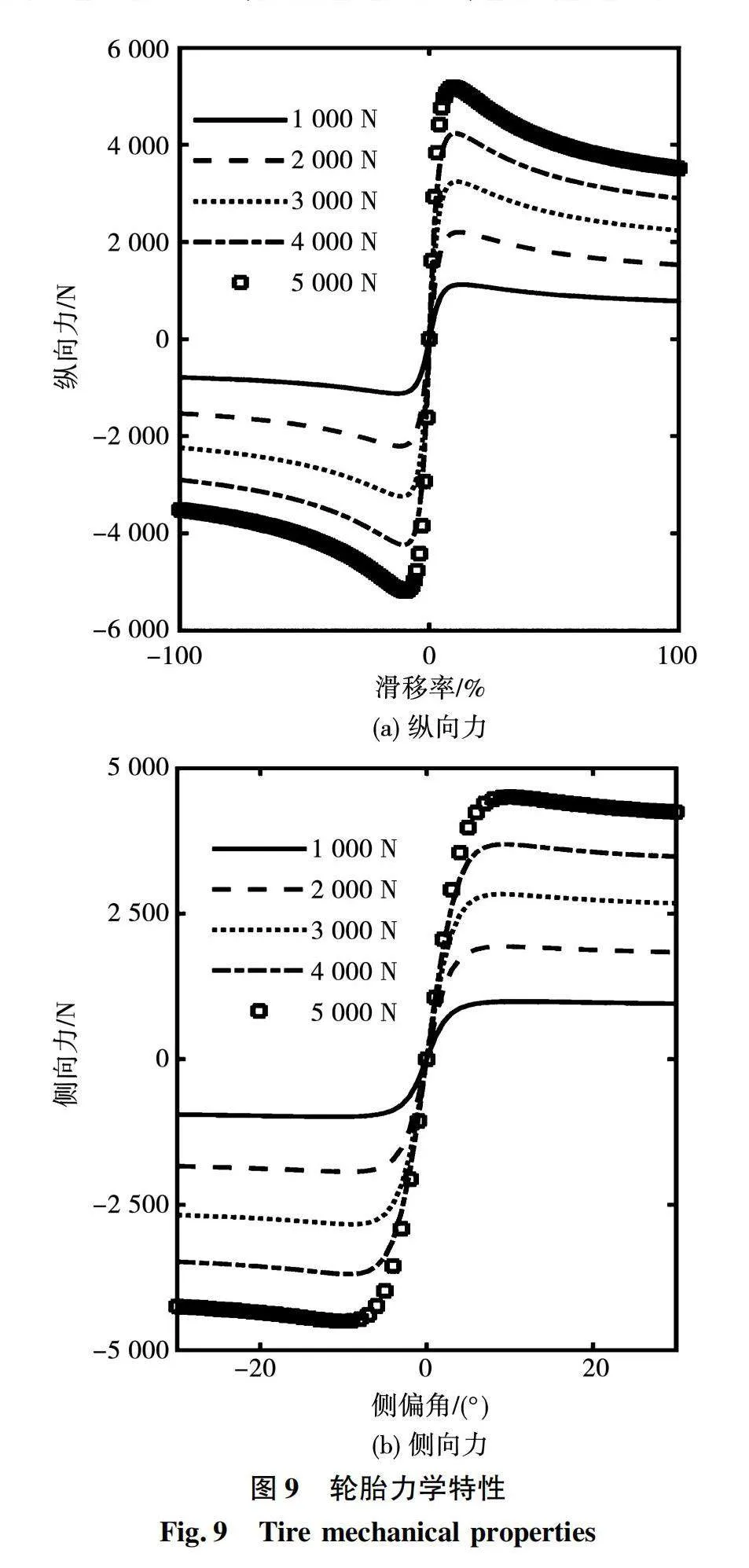
根据魔术轮胎公式,得到不同垂直载荷下的轮胎力学特性如图9所示。当轮胎滑移率处于10%以内时轮胎纵向力近似呈线性变化。当滑移率超出10%,轮胎进入非线性区域。此时随滑移率增大,轮胎纵向力反而减小。同理,当侧偏角超过8°,轮胎进入非线性区域,随侧偏角增大,轮胎侧向力减小。
2.2 车辆操纵稳定性模型
7自由度的车辆动力学模型能够有效地表述电动汽车行驶过程中簧载质量的侧倾与横摆运动[15]。为探究轮毂电机倾斜偏心产生的不平衡径向力对车辆动力学的影响机理。本文在7自由度模型的基础上将轮毂电机拆分,构建如图10所示的车辆动力学模型。
以车轮接地中心为原点建立运动坐标系,电动汽车转向时轮毂电机的响应动力学方程可表示为[16]:
式中:Is、Ir为轮毂电机定、转子总成横摆惯量;γs和γr为定、转子总成横摆角速度;γw为车轮横摆角速度;Tu为倾斜偏心下的轮毂电机不平衡径向力矩。
进一步,根据轮毂电机横摆运动关系可将倾斜气隙偏心位移Δg表示为
由于电机气隙长度远小于其轴向长度,因此可将上式改写为
式中Fu为倾斜气隙偏心下的电机不平衡径向力。
同时根据动力学模型的响应关系,车辆的纵向运动为
车辆的侧向运动表示为
车辆的横摆运动为
车辆的侧倾运动为
进一步,车辆各轮的垂向载荷可表示为:
上述公式中符号的具体含义与数值见文献[12]。
3 电动汽车动力学响应特性分析
3.1 工况设定
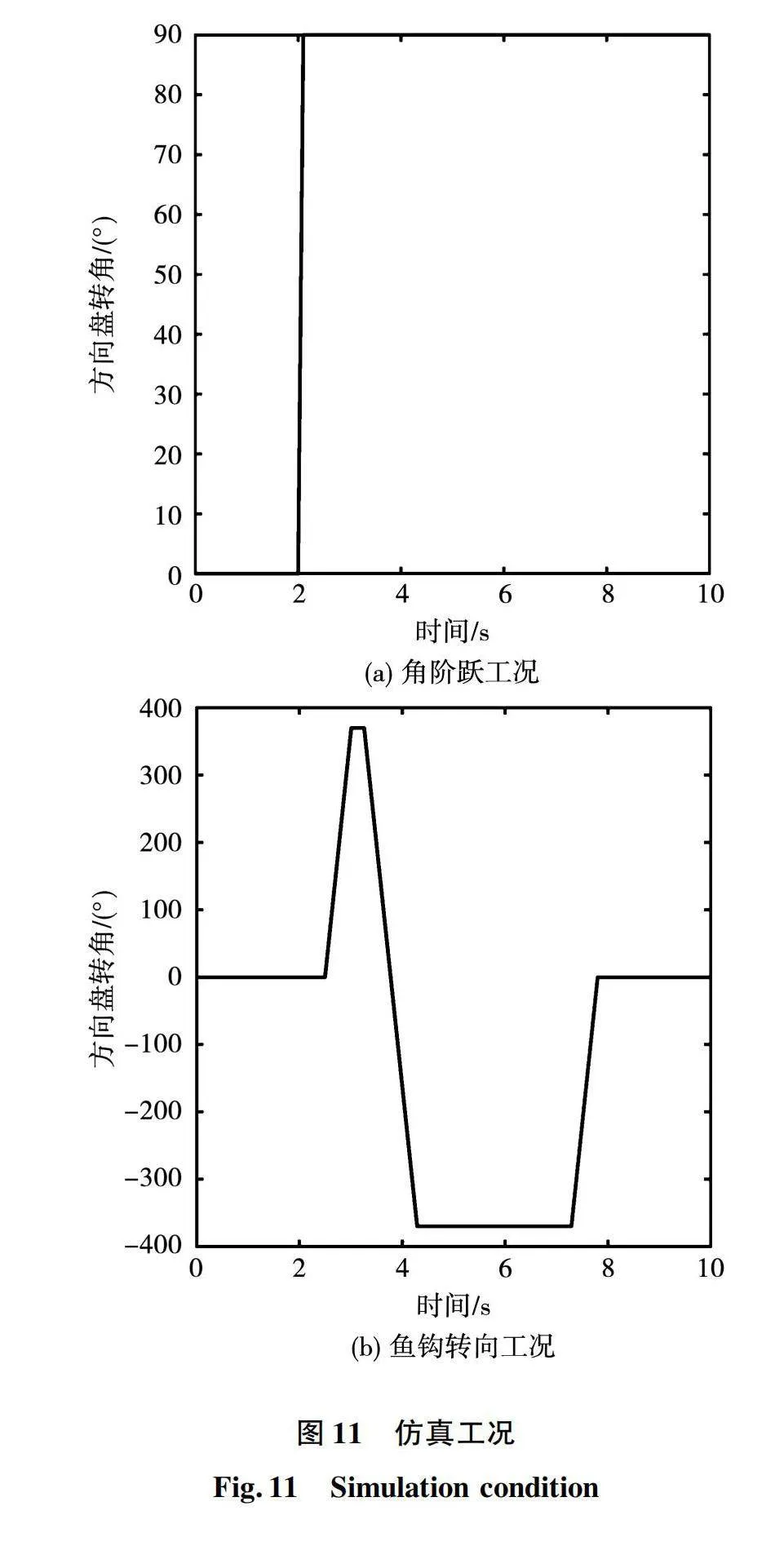
转角阶跃主要模拟车辆在常规工况下的转向特性。鱼钩转向主要探究车辆在极限工况下的抗侧翻特性,鱼钩转向具有T1与T2两个易侧翻的阶段。T1为第一次达到极限转角后保持方向盘固定的250 ms,T2为反转方向盘第二次达到极限角度后保持不变的3 s。2种转向输入如图11所示。
3.2 阶跃转向下的动力学响应
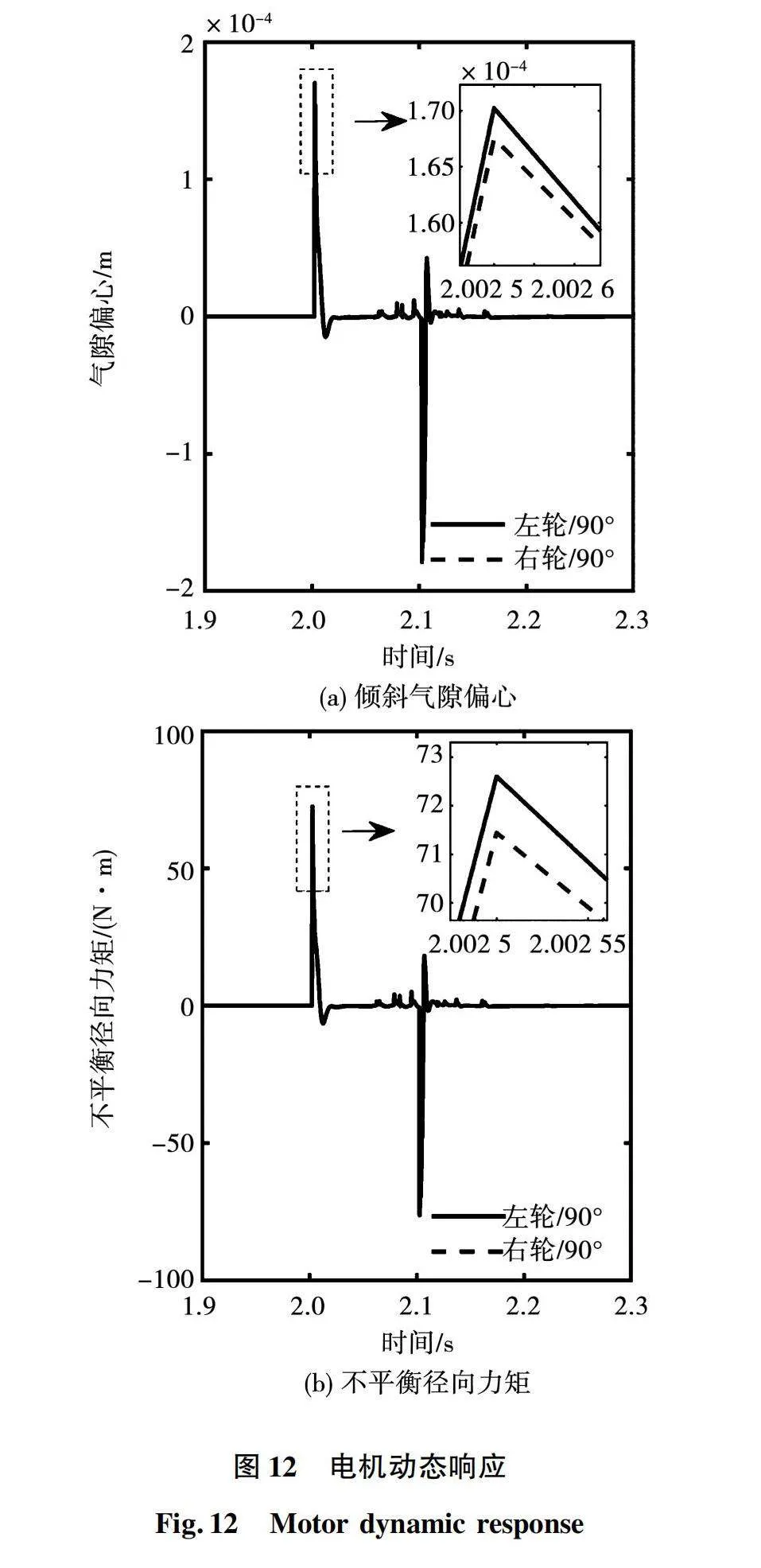
转角阶跃输入下电机动态响应变化如图12所示。电机的倾斜偏心主要发生在汽车转向的起始与结束阶段。由于电机加工误差以及轴承的磨损,导致轮毂电机定、转子总成在车辆转向力矩的作用下存在时滞特性。同时定、转子总成的横摆转动惯量存在差值,致使其存在横摆转矩差。时滞特性与横摆转矩差共同作用致使倾斜气隙偏心和不平衡径向力矩在上述转向起始与结束阶段阶跃至峰值,并在车辆进入稳态响应后逐渐降低且最终趋向于0。此外,车辆往左转向时,左前轮转角大于右前轮转角,左前轮的偏心与不平衡径向力矩大于右前轮。
在电机倾斜偏心的干扰下,车轮响应特性存在误差,如图13所示,不平衡径向力矩直接作用于车轮,导致转向角减小,随之造成侧偏角下降。
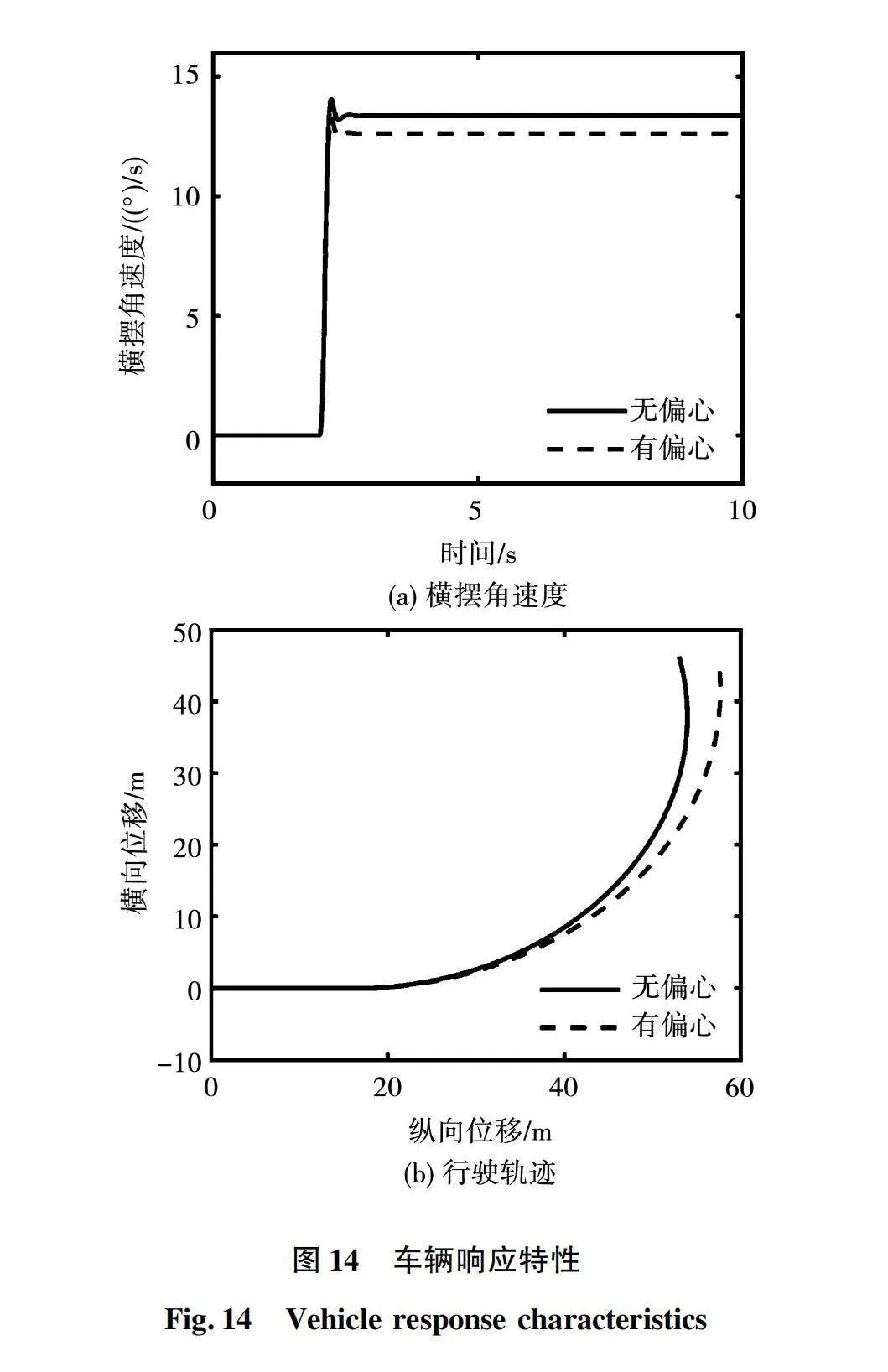
进一步,车辆响应特性如图14所示,根据车辆纵横向位移得到轨迹如图14(b)所示。在相同车速与转向盘转角下,不平衡径向力矩使车辆横角摆速度不足。进而导致车辆转向半径增大,轨迹偏离驾驶员的预期。
3.3 鱼钩转向下的动力学响应
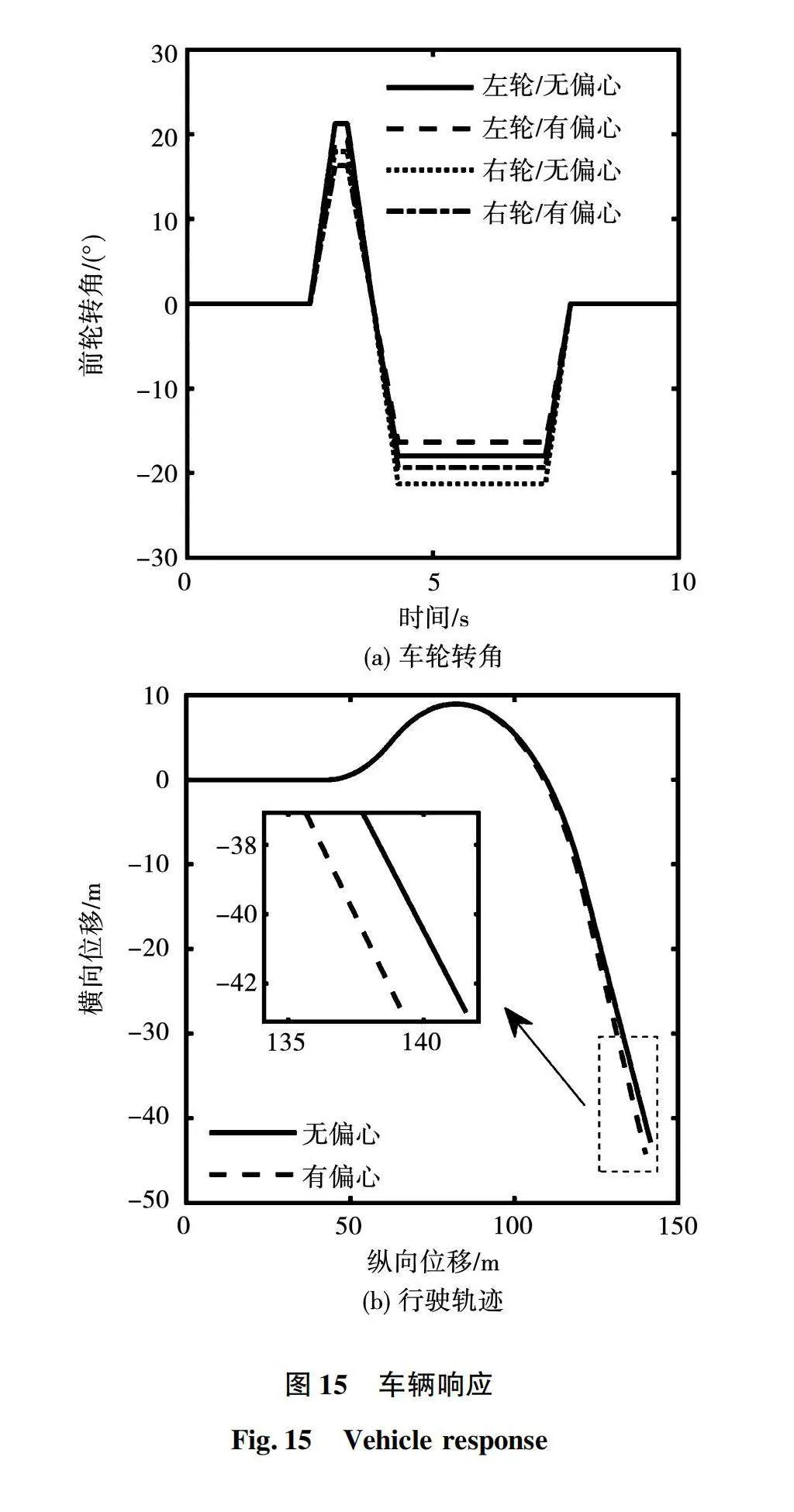
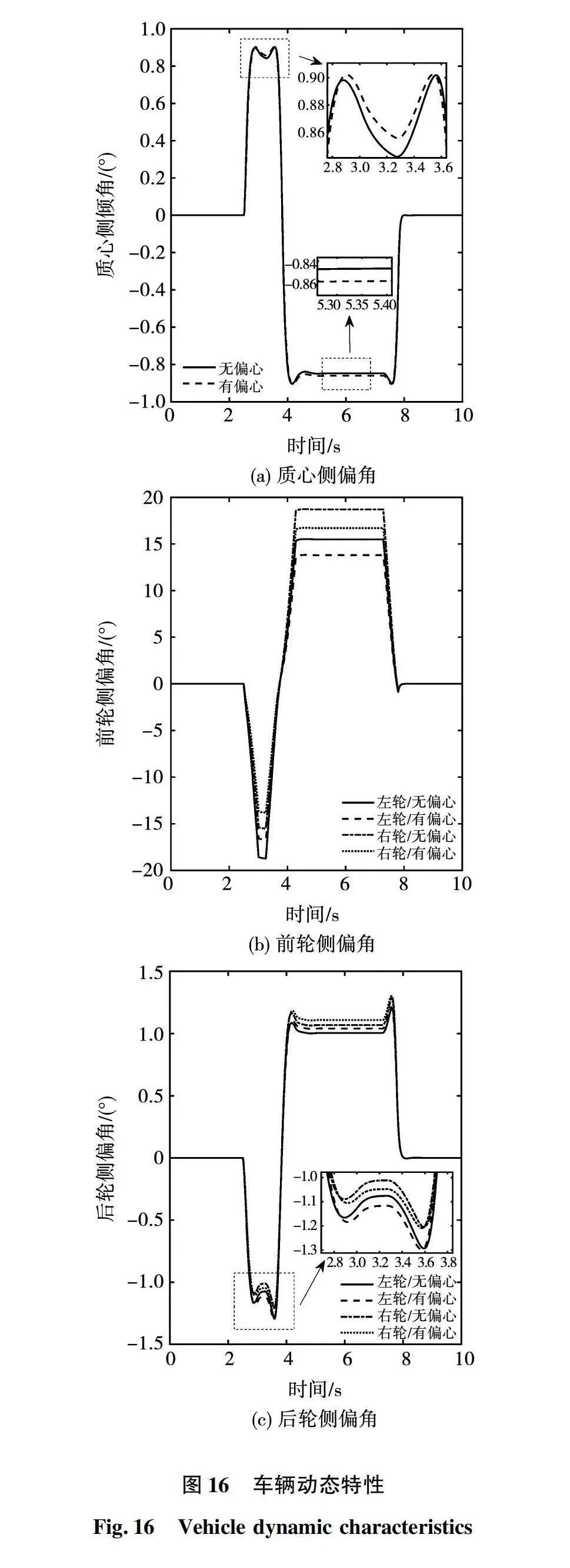
鱼钩转向能体现车辆在极限应急转向下的抗侧翻特性,车辆响应如图15所示。不平衡径向力矩使车轮转角无法达到预期,但与角阶跃工况不同之处在于此时行驶轨迹内移,极易造成车辆失控。
车辆动态特性如图16所示,由图可知,车辆质心侧倾角在T1与T2阶段增大。车辆质心在运动方向上发生漂移,车辆出现过度转向。并且在T2阶段后轮侧偏角增大,致使过度转向趋势增加。
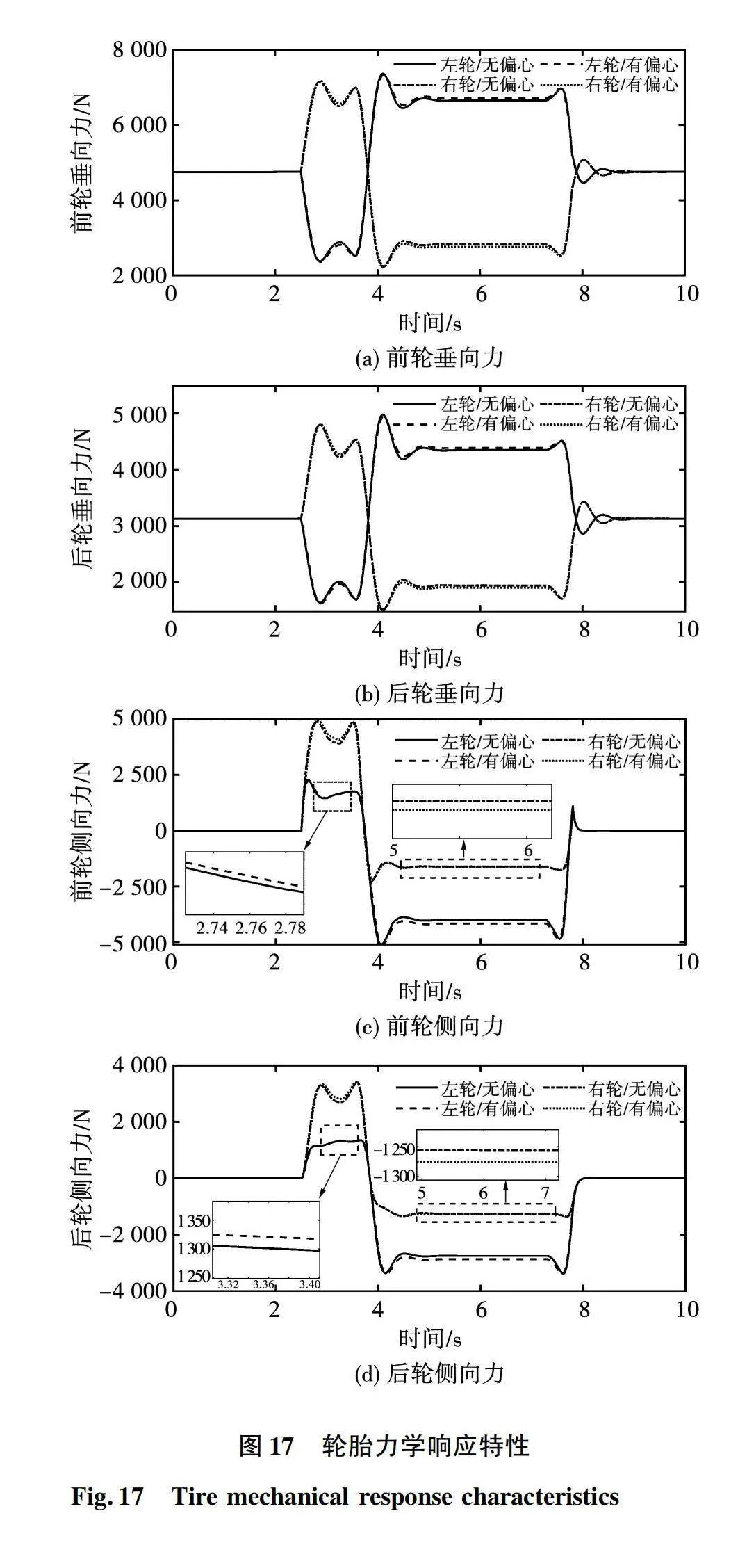
进一步,结合如图17所示的车轮力学特性可知,在不平衡径向力矩的作用下,轮胎轴荷转移率增大,T1阶段右侧垂向力增大,左侧垂向力减小。因此,车辆在紧急转向过程中车轮跳离地面概率增大。值得注意的是,在T1阶段左侧轮胎垂向力降低的同时,轮胎侧向力增加。在T2阶段右侧轮胎垂向力降低的同时,轮胎侧向力同样有所增加。这无疑会增加车辆横向失稳的风险,降低车辆的操纵稳定性。
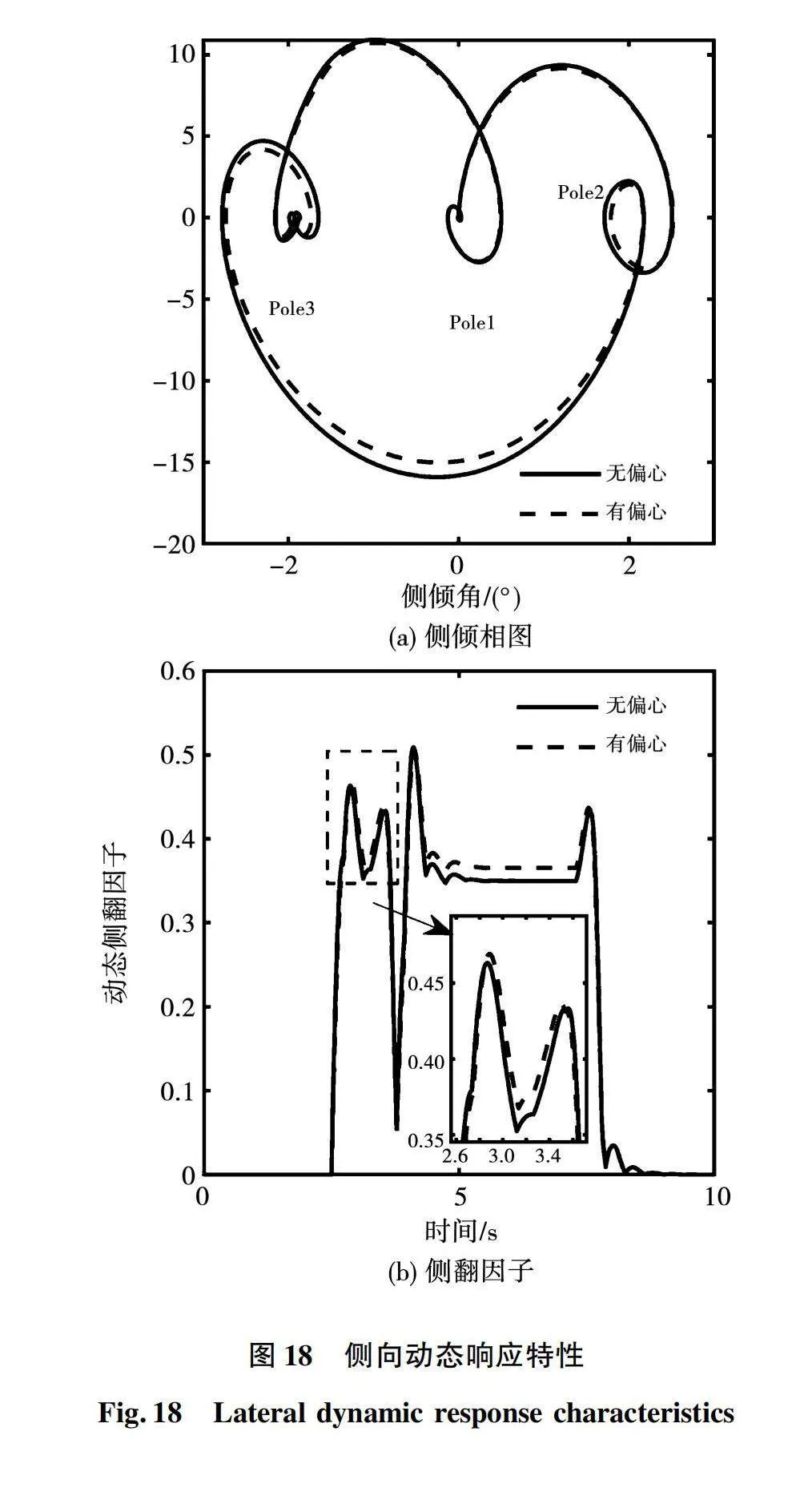
此外,鱼钩转向下的车身侧倾响应存在3个稳定的极点,如图18(a)所示。极点1为车辆在进入鱼钩转向前的直线行驶阶段,极点2与极点3为车辆在第一和第二阶段的转向过程。侧倾相图的闭合说明车辆能最终返回稳定状态。动态侧翻因子如图18(b)所示,进一步通过侧倾相图与动态侧翻因子的对比发现,侧倾相图的极点2与极点3刚好与鱼钩转向的T1与T2阶段相对应。不平衡径向力矩均致使极点2与极点3处车身的侧倾角与侧倾率增大,同时在不平衡径向力矩的作用下,动态侧翻因子的均方根值由0.263 9增加至0.270 5,且T1与T2阶段的动态侧翻因子进一步增大,这意味着车辆侧翻的风险增大。综上所述,在紧急转向的情况下,轮毂电机倾斜偏心造成的不平衡径向力矩会降低车辆操纵稳定性与抗侧翻能力。
3.4 响应机理
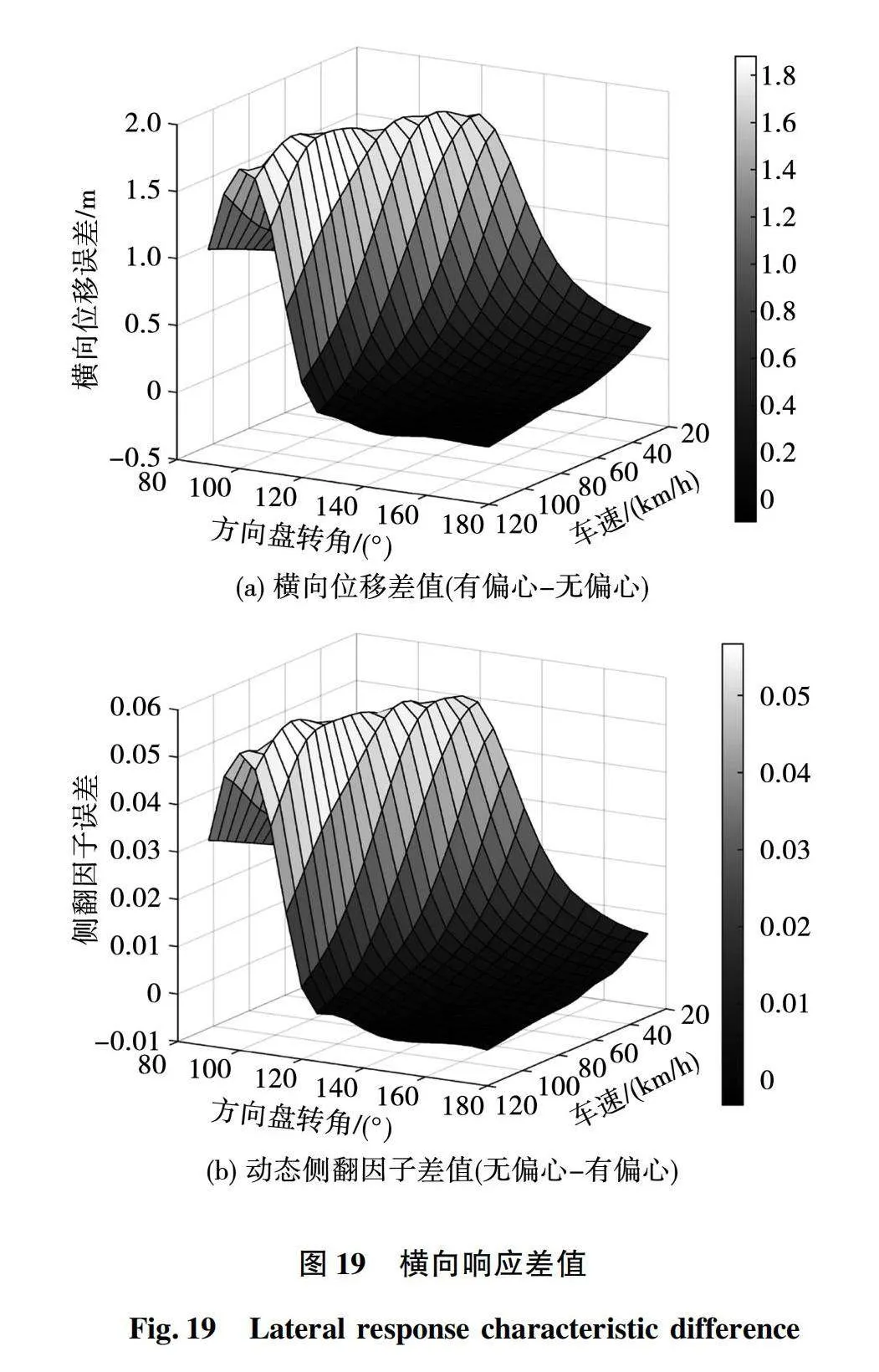
为进一步探究车辆由常规工况进入极限工况时不平衡径向力矩对车辆操纵稳定性的影响规律,设定车辆在不同方向盘转角和不同车速下行驶。在倾斜偏心影响下的电动汽车横向位移差以及侧翻因子差如图19所示。
在低速小方向盘转角的常规工况下,横向位移差大于0,表明倾斜偏心下的车辆横向位移大于无偏心状态,此时轨迹外移。侧翻因子差大于0,表明倾斜偏心下的侧翻因子小于无偏心状态,车辆侧翻的可能性降低。在高速大方向盘转角的极限工况下,横向位移差小于0,侧翻因子差小于0。不平衡径向力矩导致轨迹内移,车辆出现过度转向。同时侧翻因子增加,车辆侧翻的可能性增大。
但值得注意的是,造成该现象的原因具有一定的差异。由轮胎模型可知,车轮力学特性存在线性和非线性区域。电机倾斜偏心产生的不平衡径向力矩直接作用于轮胎,与轮胎力、滑移率以及侧偏角相互耦合。在常规工况下,轮胎滑移率和侧偏角较小,轮胎力随着滑移率或侧偏角的增加而线性增加。不平衡径向力矩使轮胎转角降低,这间接导致侧偏角的减小。此时轮胎力线性下降,车辆无法获得足够的侧向力,转向半径由此增大。在极限工况下,轮胎进入非线性耦合区,轮胎力随着滑移率或侧偏角的增加而减小,并呈现非线性变化。不平衡径向力矩同样使转向角与侧偏角减小。但与常规工况不同之处在于,轮胎力此时非线性增加,这导致车辆抗侧翻的能力下降,发生侧翻的可能性进一步加剧。综上所述,在常规工况下应着重考虑电机倾斜偏心对车辆轨迹的影响,在极限工况下着重考虑车辆的抗侧翻特性。
4 结 论
本文从轮毂电机倾斜偏心的角度出发,探讨车辆转向时不平衡径向电磁力对车辆操纵稳定性的作用机理。主要结论如下:
1)轮毂电机的倾斜气隙偏心产生的不平衡径向电磁力主要以力矩的形式作用于车轮,进而影响轮胎的力学特性。
2)倾斜偏心主要发生于车辆转向开始和结束阶段,并且车轮转角对倾斜偏心的影响大于速度的影响。
3)在常规工况下,倾斜气隙偏心导致车辆轨迹外移,增大电动汽车与其他车辆发生碰撞的概率。在极限工况下,车辆轨迹内移,降低车辆的抗侧翻能力,加剧车辆侧翻的可能性。
参 考 文 献:
[1]TANC B, ARAT H T, CONKER C, et al. Energy distribution analyses of an additional traction battery on hydrogen fuel cell hybrid electric vehicle[J]. International Journal of Hydrogen Energy, 2020, 45(49): 26344.
[2]TU Ran, GAI Yijun, FAROOQ B, et al. Electric vehicle charging optimization to minimize marginal greenhouse gas emissions from power generation[J]. Applied Energy, 2020, 277: 115517.
[3]REZIG A, BOUDENDOUNA W, DJERDIR A, et al. Investigation of optimal control for vibration and noise reduction in-wheel switched reluctance motor used in electric vehicle[J]. Mathematics and Computers in Simulation, 2020, 167: 267.
[4]LI Zhe, ZHENG Ling, GAO Wenyun, et al. Electromechanical coupling mechanism and control strategy for in-wheel motor driven electric vehicles [J]. IEEE Transactions on Industrial Electronics, 2018, 66(6): 4524.
[5]ZUO Shuguang, LIU Zexu, HU Shenglong. Influence of rotor eccentricity on radial electromagnetic force characteristics in switched reluctance motors and compensation[J]. Electric Power Components and Systems,2020,388:398.
[6]DENG Zhaoxue, LI Xu, LIU Tianqin, et al. Modeling and suppression of unbalanced radial force for in-wheel motor driving system[J]. Journal of Vibration and Control, 2022,28(21/22):3108.
[7]WANG Feng, WU Zhiqiang, WANG Yuancen, et al. Lateral superharmonic resonance of the rotor in 12/8 poles switched reluctance motor[J]. Mathematical Problems in Engineering, 2018 (11):1.
[8]WANG Yanyang, LI Yinong, SUN Wei, et al. Effect of the unbalanced vertical force of a switched reluctance motor on the stability and the comfort of an in-wheel motor electric vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2015, 229(12):1569.
[9]TAN Di, LU Chao. The Influence of the magnetic force generated by the in-wheel motor on the vertical and lateral coupling dynamics of electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2016, 65(6):4655.
[10]ZHANG Lipeng, ZHANG Silong, ZHANG Wei. Multi-objective optimization design of in-wheel motors drive electric vehicle suspensions for improving handling stability[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2019, 233(8): 2232.
[11]TAN Di, WU Y, SONG F. Study on the vertical and lateral coupling dynamics control of the in-wheel motor-driven electric vehicles under multi-excitation[J]. International Journal of Electric amp; Hybrid Vehicles, 2017, 9(4):322.
[12]李旭. 电动汽车轮毂电机驱动系统动力学负效应及抑制研究[D].重庆:重庆交通大学,2022.
[13]HU Shenglong, ZUO Shuguang, LIU Mingtian, et al. Modeling and analysis of radial electromagnetic force and vibroacoustic behaviour in switched reluctance motors[J]. Mechanical Systems and Signal Processing, 2020, 142:106778.
[14]LU S B, LI Y N, CHOI S B. Contribution of chassis key subsystems to rollover stability control[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2012,226(4):479.
[15]ZHANG Nong, DONG Guangming, DU Haiping. Investigation into untripped rollover of light vehicles in the modified fishhook and the sine maneuvers. Part I: Vehicle modelling, roll and yaw instability[J]. Vehicle System Dynamics, 2008, 46(4): 271.
[16]LI Xu, DENG Zhaoxue, CHEN Tao, et al. Negative dynamics effect of in-wheel switched reluctance motor with inclined airgap eccentricity on handing stability for electric vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2023,237(7):1.
(编辑:邱赫男)