基于MRAS的无刷双馈电机无位置传感器鲁棒控制
2024-12-03陈晗张永昌蒋涛杨长山何俊辉










摘 要:为取消级联无刷双馈电机系统中成本高、布线难且脆弱的位置传感器,在模型参考自适应系统(MRAS)方法的基础上,提出了一种改进的基于控制绕组电流的无位置控制方法。通过将参考模型和可调模型转换到同步坐标系下,减少了磁链观测器的使用,并将参考模型和可调模型的误差进行线性化,在简化控制器参数设计的同时提高了动态性能。将其与基于扩张状态观测器的鲁棒预测控制相结合,实现了无位置传感器高性能闭环控制。实验结果表明,与传统的转速观测器和模型参考自适应方法相比,所提方法在不同转速下稳态脉动和电流谐波更小;动态阶跃响应速度略慢但估计的转速位置信息更精确;在参数变化时能快速准确地计算出位置和转速,表现出参数强鲁棒性,具有实用性。
关键词:级联无刷双馈电机;无位置传感器;预测控制;模型参考自适应;参数鲁棒性;扩张状态观测器
DOI:10.15938/j.emc.2024.10.003
中图分类号:TM343
文献标志码:A
文章编号:1007-449X(2024)10-0024-10
收稿日期: 2024-04-12
基金项目:国家自然科学基金(52077002)
作者简介:陈 晗(2001—),女,博士研究生,研究方向为双馈电机预测控制;
张永昌(1982—),男,博士,教授,博士生导师,研究方向为模型预测控制在电力电子与电机控制中的应用;
蒋 涛(1995—),男,博士研究生,研究方向为双馈电机预测控制;
杨长山(2000—),男,硕士,研究方向为无刷双馈电机预测控制;
何俊辉(1984—),男,硕士,工程师,研究方向为感应电机控制技术、伺服运动控制方案。
通信作者:张永昌
Position sensorless robust control of brushless doubly fed generator based on the MRAS observer
CHEN Han1, ZHANG Yongchang1, JIANG Tao1, YANG Changshan1, HE Junhui2
(1.School of Electrical and Electronic Engineering, North China Electric Power University, Beijing 102206, China;2.Shenzhen INVT Electric Co., Ltd., Shenzhen 518106, China)
Abstract:To remove the fragile position sensor with high cost, and complex wiring in the cascaded brushless doubly-fed generator (CBDFG) system, an improved position sensorless method based on the control winding current was proposed, which employed the principle of model reference adaptive system (MRAS). The method converts the reference model and the adjustable model to the synchronous coordinate system to reduce the use of the flux observer, and linearizes the error between them since simplifying the parameter design also improving the dynamic performance. It is combined with robust predictive control based on extended state observer to realize sensorless closed-loop control of high performance. The experimental results demonstrate that, compared with the rotor speed observer method or the conventional MRAS method, the improved MRAS method has smaller steady-state pulsation and current THD at different speed. While the dynamic step response speed is marginally slower, the speed and position estimation are more precise. Furthermore, when the parameters change, the position and speed information can swiftly and accurately be calculated, which exemplifies a high level of parameter robustness and practicality.
Keywords:cascaded brushless doubly-fed generator; position sensorless; predictive control; model reference adaptive system; parameter robustness; extended state observer
0 引 言
在双碳目标的推动下,全球能源结构正在发生深刻变革。作为清洁、可再生的能源形式,风电在解决能源需求、减少碳排放、应对气候变化等方面具有重要意义。特别是海上风电,凭借其丰富的资源、广阔的发展空间和逐渐成熟的技术,正逐渐成为全球能源转型的重要力量。海上由于其运行环境复杂,对发电机的鲁棒性能提出了较高的要求。目前,海上风电机组运行与维护困难、费用高是限制海上风电大规模开发的主要原因之一[1]。无刷双馈电机不仅继承了双馈电机变流器容量小、成本低、能量双向流动等优点,而且在结构上消除了电刷和滑环,降低了系统维护的成本,提高了系统的可靠性[2]。因此,无刷双馈电机在海上风电中有着广阔的应用场景。
在实际应用中,要达到电机的高性能控制,电机运行的转速和位置信息必不可少,比如矢量控制中的交叉解耦项需要转速信息,坐标变换也需要位置信息。通过位置传感器虽能直接得到转速和位置信息,但是不仅增加了成本,而且当传感器损坏时,提供不准确的转速和位置信息可能会引起系统不稳定,降低了系统的可靠性。采用无位置传感器的方法实时估算转速和位置替代位置传感器,不仅能够降低成本,还能够提高系统的稳定性和可靠性,因此实现高性能的无位置传感器控制可以进一步挖掘无刷双馈电机维护成本低的优势。
但要实现高性能的无位置传感器控制,在保证位置估计的精确度和动态性能的同时,还要考虑其参数鲁棒性问题。无位置传感器算法通常包括信号注入法[3]、观测器方法[4-6]、模型参考自适应法[7-9]。由于在风力发电中往双馈电机或者是无刷双馈电机中注入高频信号是不容易实现的,因此,信号注入法虽然对电机参数的鲁棒性较好,但鲜有在无刷双馈电机中的研究。在观测器的方法中,基于滑模观测器[5-6]和转速观测器[4]的研究较多。滑模观测器通过构造滑动平面,设计开关函数使系统最终回归至滑模面,可能会出现在滑模面上抖振的问题。转速观测器(rotor speed observer,RSO)的原理与锁相环[10]类似,虽然对电机参数较为鲁棒,但动态效果有待提升。基于模型参考自适应的方法在双馈电机中应用较多,模型参考自适应系统(model reference adaptive system,MRAS)通过构造观测同一个变量的参考模型和可调模型,然后让二者之差通过自适应律得到转速和位置,在传动系统中得到了较多研究和应用。
近年来无位置传感器控制得到了国内外研究学者的关注[11-14],但与永磁电机、双馈电机相比,由于无刷双馈电机的数学模型更复杂,在无位置传感器方面的研究相对较少且滞后。文献[15]以驱动系统中的无刷双馈电机作为研究对象,通过观测功率侧磁链和控制侧磁链的角度来计算转子位置和转速,原理简单但受磁链观测精确度的影响。文献[4]针对基于无刷双馈电机的船用轴带独立发电系统,通过观测功率侧电压和控制侧电流的角度来估计转子位置,并引入了二阶广义积分信号正交发生器和锁相环来提高对不平衡负载的适应性。在此基础上,学者们分别研究了以控制绕组电流[7]、控制绕组磁链[16]和功率绕组磁链[17]为参考模型的MRAS位置观测器,实现了无位置传感器控制。然而观测器的磁链积分器可能会带来漂移偏置,导致转子的位置和转速存在估计误差。为避免使用磁链积分器,文献[8]和文献[13]中选取功率绕组的有功功率为MRAS方法的参考模型,但其精确度受到功率侧电阻的影响。
本文在现有MRAS方法的基础上,提出一种改进的无位置传感器控制方法。选取控制绕组电流作为参考模型,将参考模型和可调模型转换到同步坐标系下,减少磁链观测器的使用,通过将误差线性化,在简化PI参数设计的同时提高了动态性能。相比现有方法,改进的方法实现起来要更为简单,在保证位置估计精确度和动态性能的同时,进一步与鲁棒预测控制[18]相结合,实现对电机参数和位置传感器鲁棒的控制,实验结果证明所提方法的有效性。
1 级联无刷双馈电机的数学模型
1.1 级联无刷双馈电机的结构
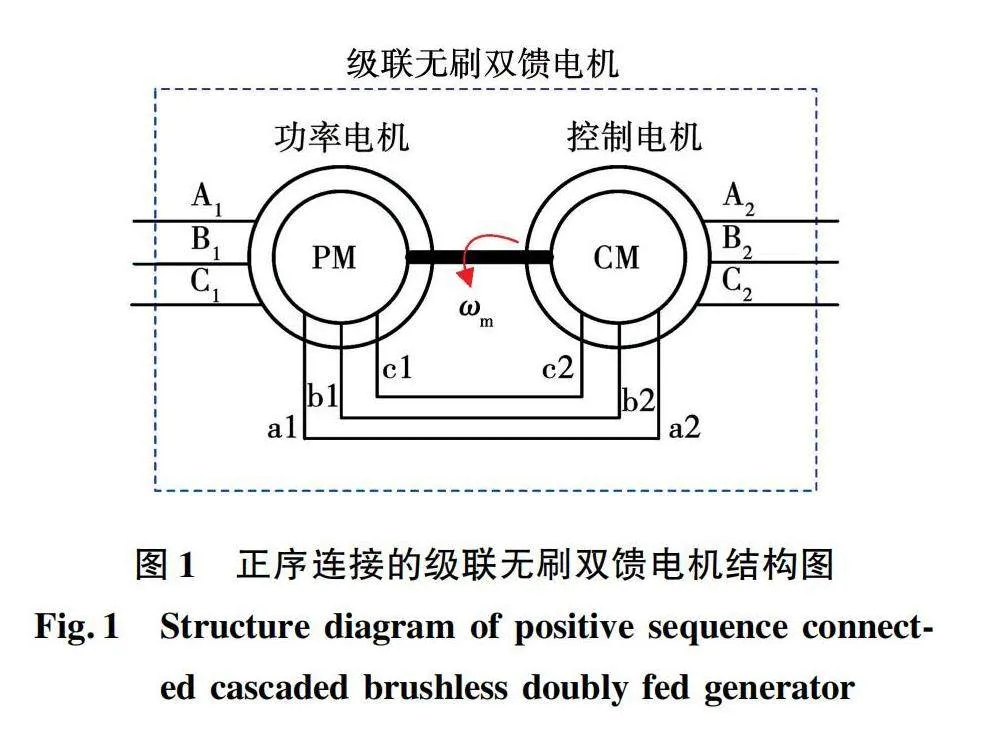
级联无刷双馈电机(cascaded brushless doubly fed generator,CBDFG)相当于两台绕线式异步电机转子绕组直接相连构成,两台电机的转子绕组在结构上有着两种连接方式:正序连接和反序连接。文中选取的研究对象是转子绕组正序连接的级联无刷双馈电机,其原理结构如图1所示。
1.2 级联无刷双馈电机的电角频率关系
在级联无刷双馈电机中,包含功率电机和控制电机,角频率之间满足以下关系:
其中:下标1和2分别表示功率电机和控制电机;下标sl、s和m分别表示该角频率为转速差角频率,定子磁链角频率和机械角速度;p表示极对数。两台电机背靠背连接,由于电机转子绕组直接相连,转子的电角频率大小相同,转向相反。当转子绕组正相序连接时,ω1sl=ω2sl,联立式(1)可以得出转子机械角速度为
1.3 级联无刷双馈电机动态数学模型
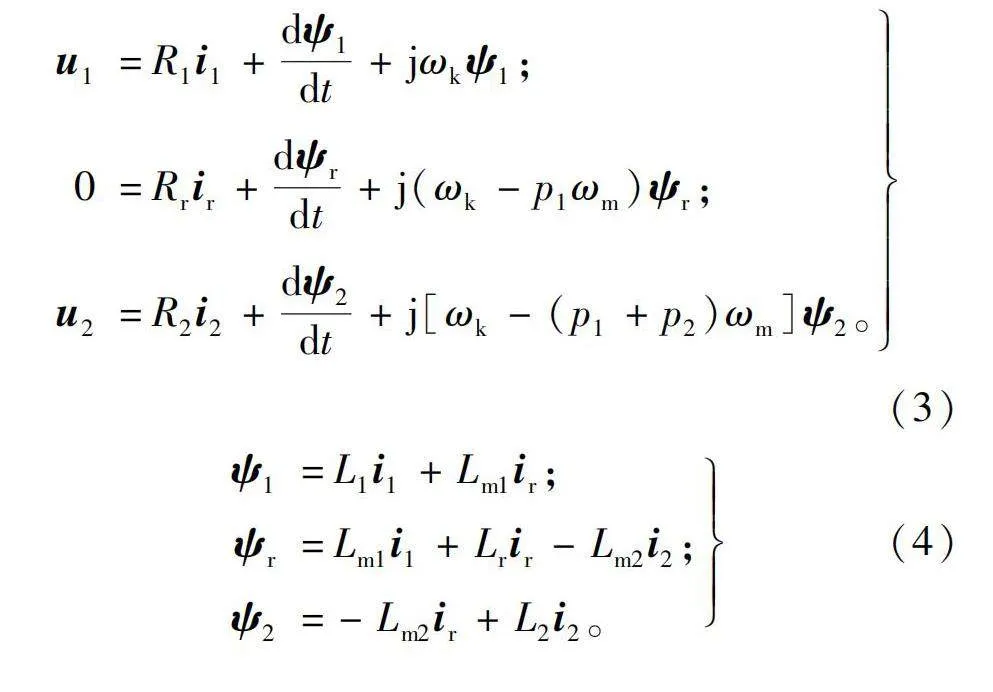
可在功率电机侧复矢量数学模型的基础上[19],推导得到在以任意角频率ωk旋转的坐标系下的CBDFG数学模型:
其中:u,i和ψ分别表示电压、电流和磁链矢量;L和R分别表示绕组电感、绕组电阻;Lm表示绕组间的互感参数;下标1,2和r分别表示功率绕组、控制绕组和转子绕组;ωm表示转子机械角速度。
根据瞬时功率理论,功率侧的输出功率可表示为
其中:P1表示功率电机输出有功功率;Q1表示功率电机输出无功功率;上标*表示共轭运算。
2 基于控制绕组电流的模型参考自适应无位置传感器方法
MRAS中参考模型的选择多种多样,有磁链[16-17,20],电流[7],功率[8,13]和转矩[7,21]等。基于不同的参考模型,构造包含位置信息的对应可调模型,通过PI控制器调节位置信息使可调模型最终等于参考模型。由于电流直接可测,一般以电流作为参考模型的较多。
2.1 传统的基于控制绕组电流的MRAS方法
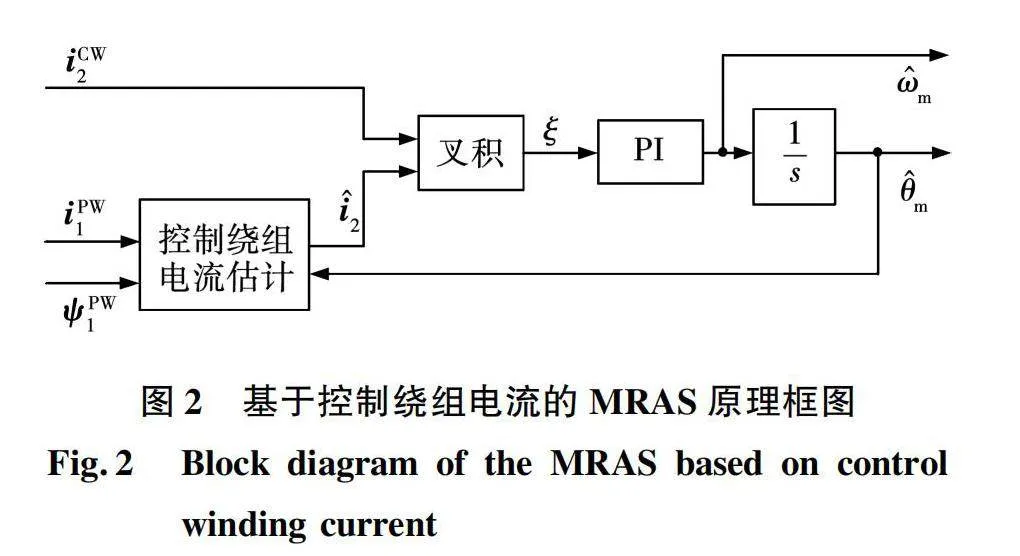
基于控制绕组电流的MRAS方法[7]主要在于可调模型的构造,其整体的结构框图如图2所示。
由式(3)中的功率电机磁链方程和式(4)中的转子电压方程可以分别得到转子旋转坐标系下(即ωk=p1ωm时)的转子电流和转子磁链表达式:
其中:上标PW代表功率电机坐标系,上标CW代表控制电机坐标系,上标RW代表转子旋转坐标系;θ^m为估计的转子位置信息。
传统的方法采用电压模型磁链观测器得到转子磁链后[19],根据式(4)中的转子磁链方程可以求得控制绕组电流。在控制电机坐标系下的估计控制绕组电流i^2可以表示为
2.2 改进的基于控制绕组电流的MRAS方法
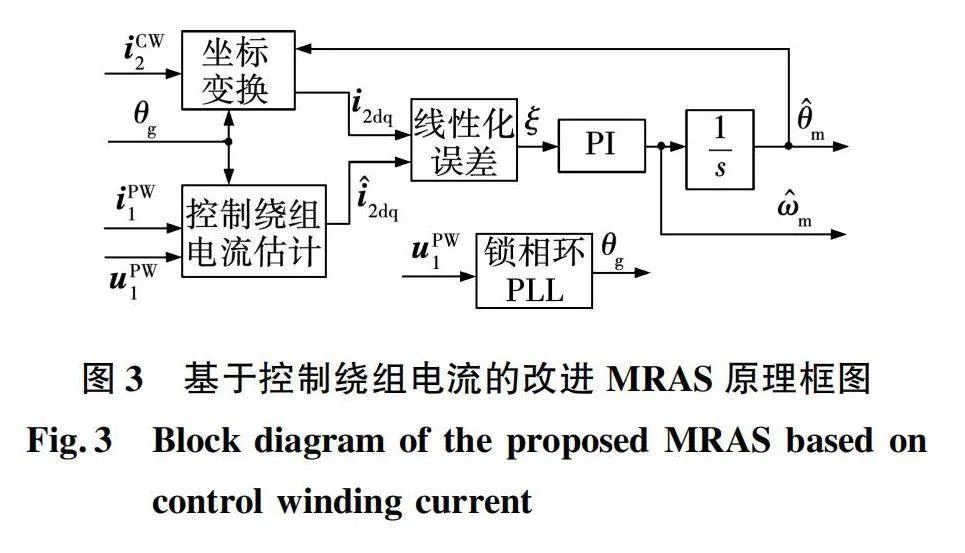
由式(8)可以看出,可调模型计算过于复杂,涉及到多个磁链积分和坐标变换。本节将可调模型和参考模型转换到电网电压同步坐标系中并忽略了动态过程,减少了磁链观测器的使用,使整个无位置控制方法更为简单。改进的MRAS原理框图如图3所示。
在稳态时,由式(3)中的转子磁链方程可以得到电网电压同步坐标系下(即ωk=ω1时)的转子磁链
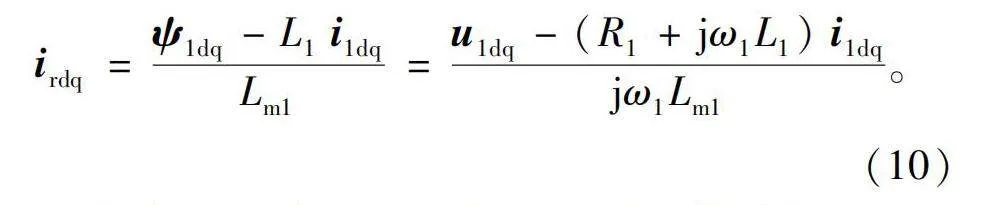
由于式(9)中的分母较大,可近似认为转子磁链为0。根据式(4)中的功率绕组磁链方程可以得到转子电流
由式(3)、式(9)和式(10)可以得到电网电压同步坐标系下估计的控制绕组电流
将采样得到的控制绕组电流坐标变换到同步坐标系后,需要得到参考模型和采样模型的误差ξ。由于传统方法中的误差ξ是控制绕组电流和估计的控制绕组电流2个矢量的叉乘,是2个矢量相移角的非线性方程:
其对于一定范围的角度不太敏感[22],可以通过下式来计算误差:
通过上式这种线性化误差的方法可以产生线性模型,误差与两个矢量间的相移角成比例关系,不仅简化了PI参数的设计,也提高了在运行范围内的动态效果[23]。
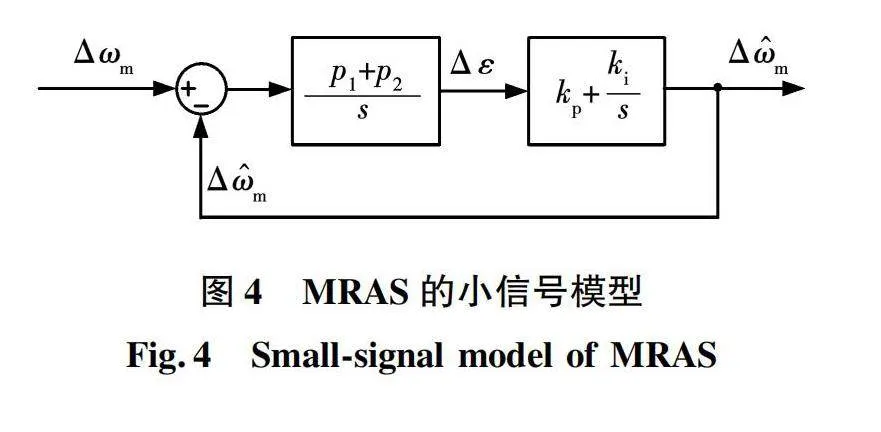
线性化后的误差进入PI控制器得到估计转速,为了方便PI控制器的设计,构建小信号模型,其结构框图如图4所示。
忽略初始条件可得
其中θerr表示矢量i2dq和矢量i^2dq之间的角度差。
当估计的转速和位置信息正确时,θerr=0。假设电机参数完全准确,在静态工作点上,i^2dq0=i2dq且θerr=0,通过式(14),可得小信号模型为
则改进的MRAS位置观测控制器的闭环传递函数为
标准二阶低通滤波器的闭环传递函数为
对于所提出的位置估计器,要求其同时具有良好的动态响应和滤波特性,而在工程实际中需要权衡这两方面因素的影响。根据经典控制理论对控制器中PI参数进行设计,选取阻尼比ξ=0.707,截止频率ωn=22.36 rad/s,可以得到:
最后将估计的转速积分成位置信息,应用到采样的控制绕组电流的坐标变换中,实现闭环观测。
2.3 基于改进MRAS的鲁棒预测控制
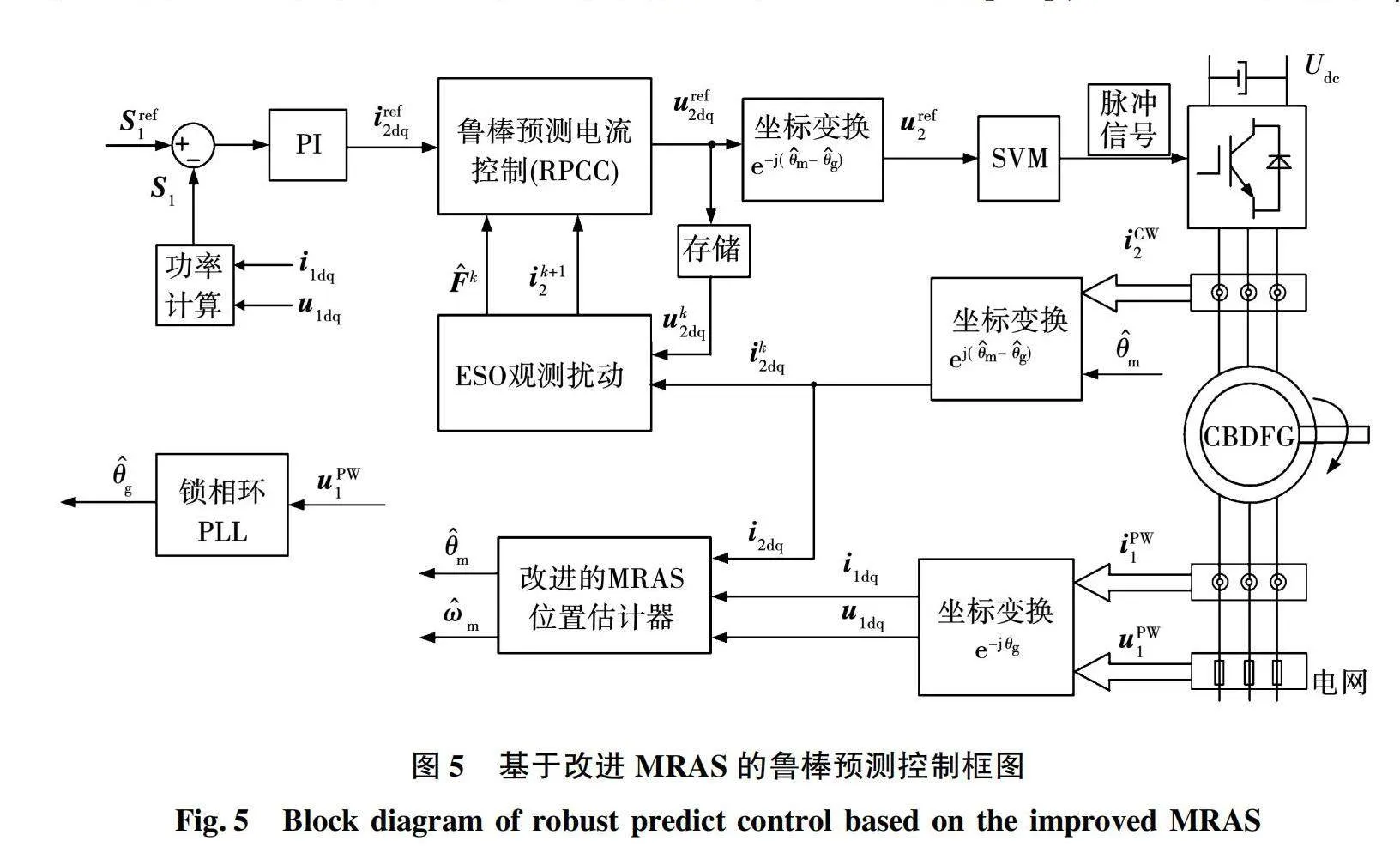
实验将估计的位置和转速闭环代入到基于扩张状态观测器(extended state observer,ESO)的鲁棒预测控制中,其控制框图如图5所示,其中ESO的设计参考了文献[18],选取ESO增益系数β=0.52 。
一般情况下,实际电机参数变化会导致可调模型计算不准确,影响位置的观测,造成观测的位置与实际位置间存在跟踪静差,但并不会影响转速的跟踪。假设转速估计准确而位置估计存在偏差,相当于实际位置和估计位置间存在一个固定的角度差Δθm。
此时,在电网电压同步坐标系下分析其对基于ESO的鲁棒预测控制内环的影响[24],为了简化分析不考虑一拍延迟补偿,由超局部模型可得:
其中:â为输入电压增益系数;F^为观测的系统总扰动量;iref2dq是由功率或磁链外环得到的控制绕组电流参考值;uref2dq为位置信息准确时计算所得的电网同步坐标系下的控制绕组电压;uref2则为实际控制绕组电压。
将式(19)代入到式(20)中可以得到
可以看出估计位置的偏差会导致控制绕组电流参考值变化,但不影响内环的跟踪能力。由于在基于ESO的鲁棒预测控制中,外环采用了PI控制器,在稳态时能够实现无差跟踪,所以最终能凭借外环的控制能力调节控制绕组电流参考值从而实现功率的无差跟踪。
3 实验结果
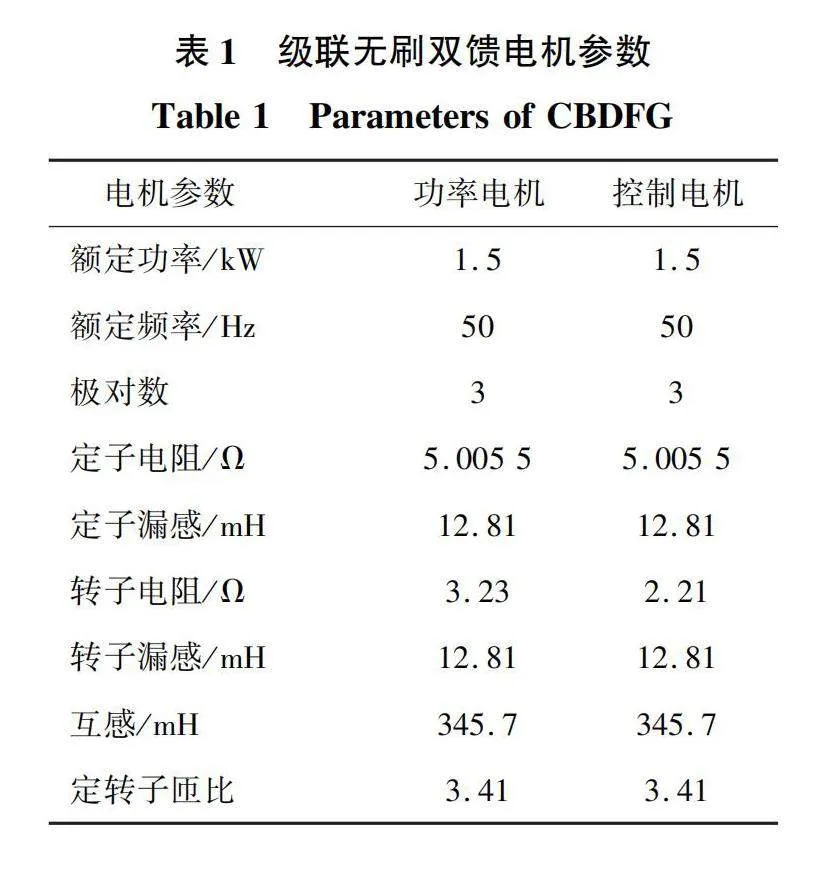
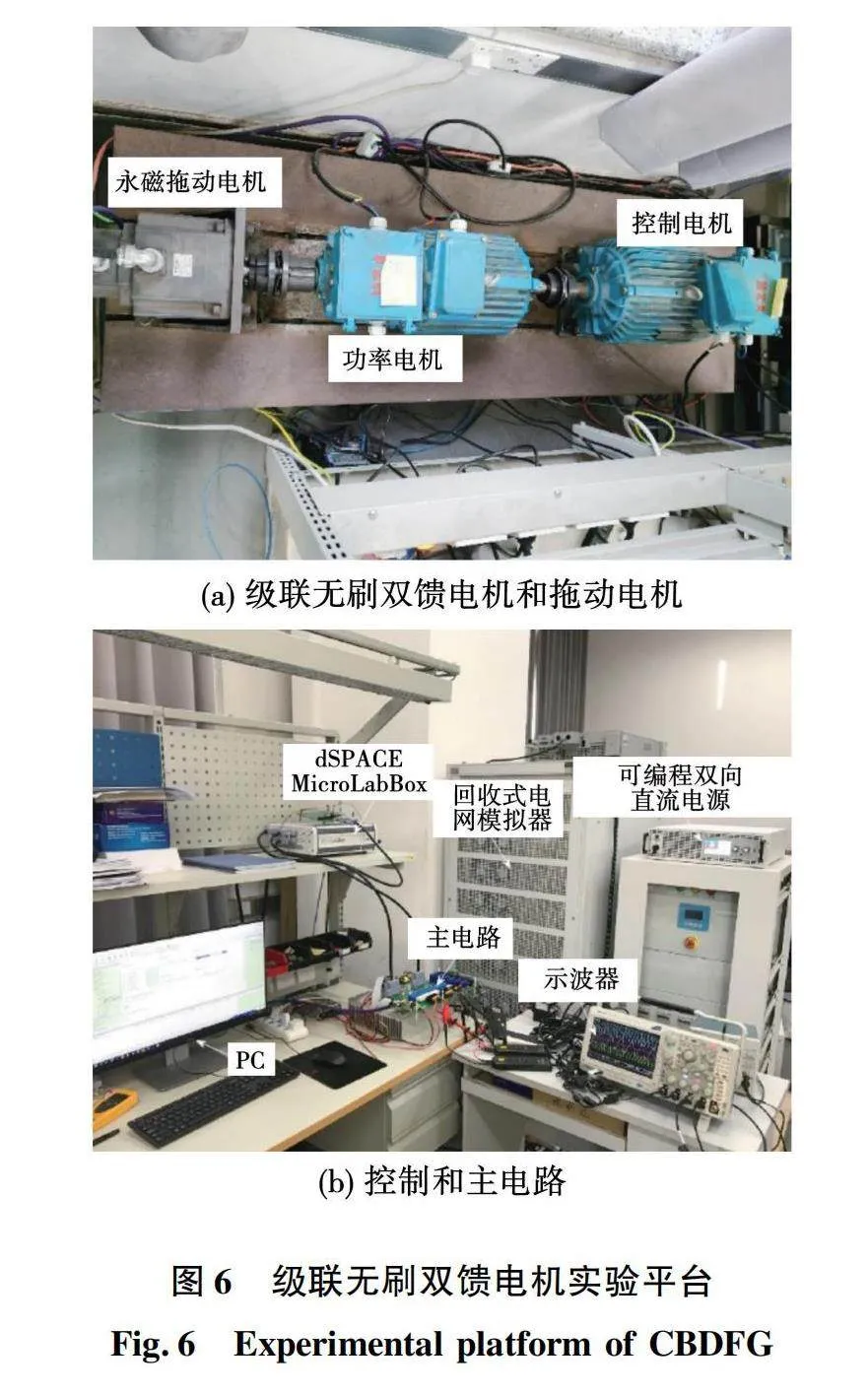
为了证明所提方法的有效性,在CBDFG实验平台上进行了测试,实验平台如图6所示。实验结果都是通过与MicroLabBox和PC机接口的ControlDesk进行记录,然后利用MATLAB软件对存储的数据进行分析和绘制。所有的实验均将估计的位置和转速闭环代入到基于ESO的鲁棒预测控制中替代传统的位置传感器,实验所使用的控制电机和功率电机的参数如表1所示,采样频率为10 kHz。CBDFG转速范围一般是同步速的70%~130%,实验中所使用的电机同步速为500 r/min,所以运行范围为350~650 r/min。所提出的无位置传感器的控制方法分别在350 r/min和600 r/min下进行了稳态实验验证,包含了次同步工况和超同步工况,具有一定的普适性。
3.1 稳态实验结果
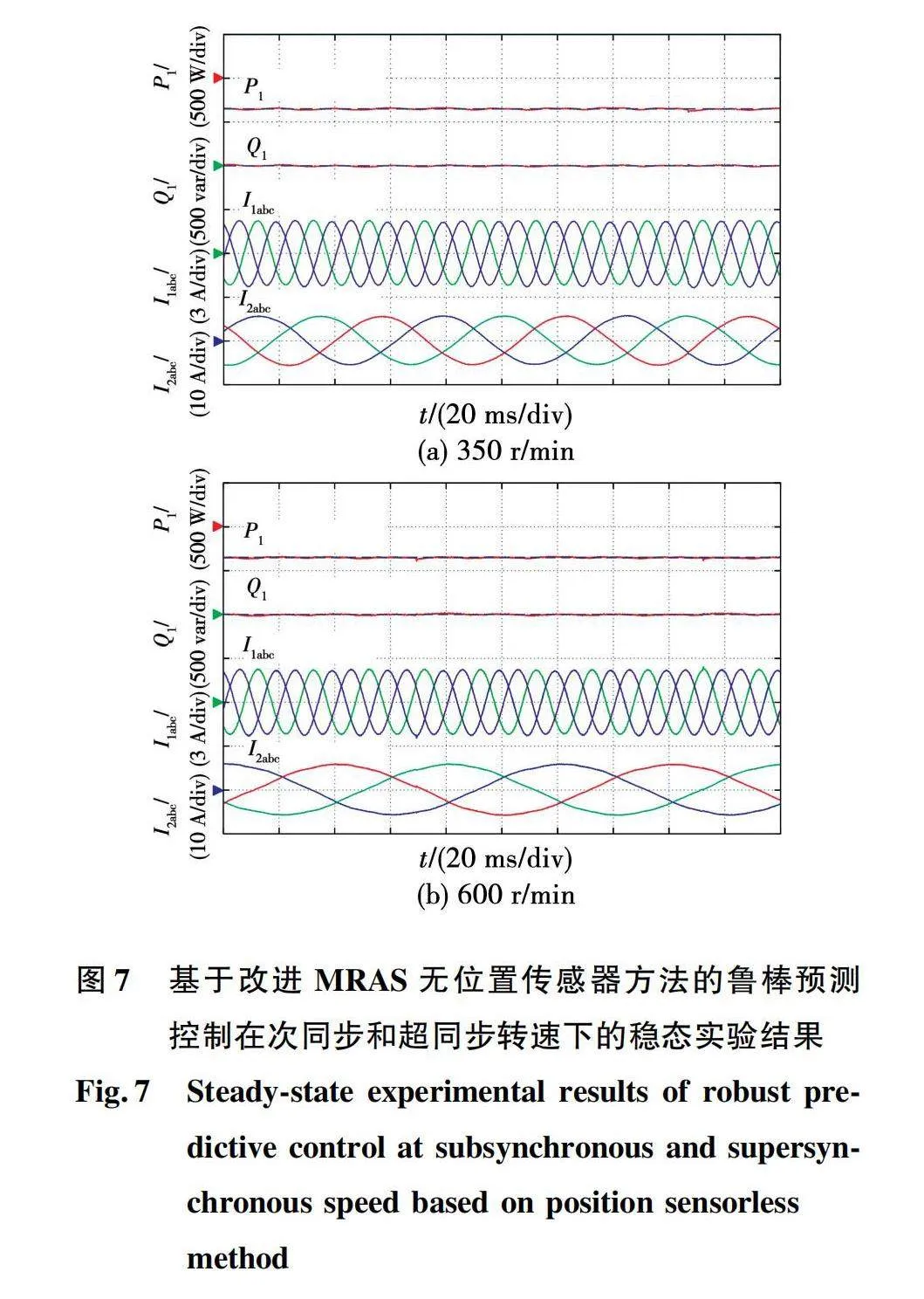
图7展示了改进的MRAS在次同步速和超同步速下的稳态实验对比,电机转速分别为350 r/min(s=0.3)和600 r/min(s=-0.2),输出有功功率参考值为-350 W,无功功率参考值为0,控制方法为基于ESO的鲁棒预测控制。
从图7中可以看出在次同步速和超同步速时,有功功率实际值和无功功率实际值都能跟踪上参考值,波动较小,基于改进MRAS方法的鲁棒预测控制取得了良好的控制效果。
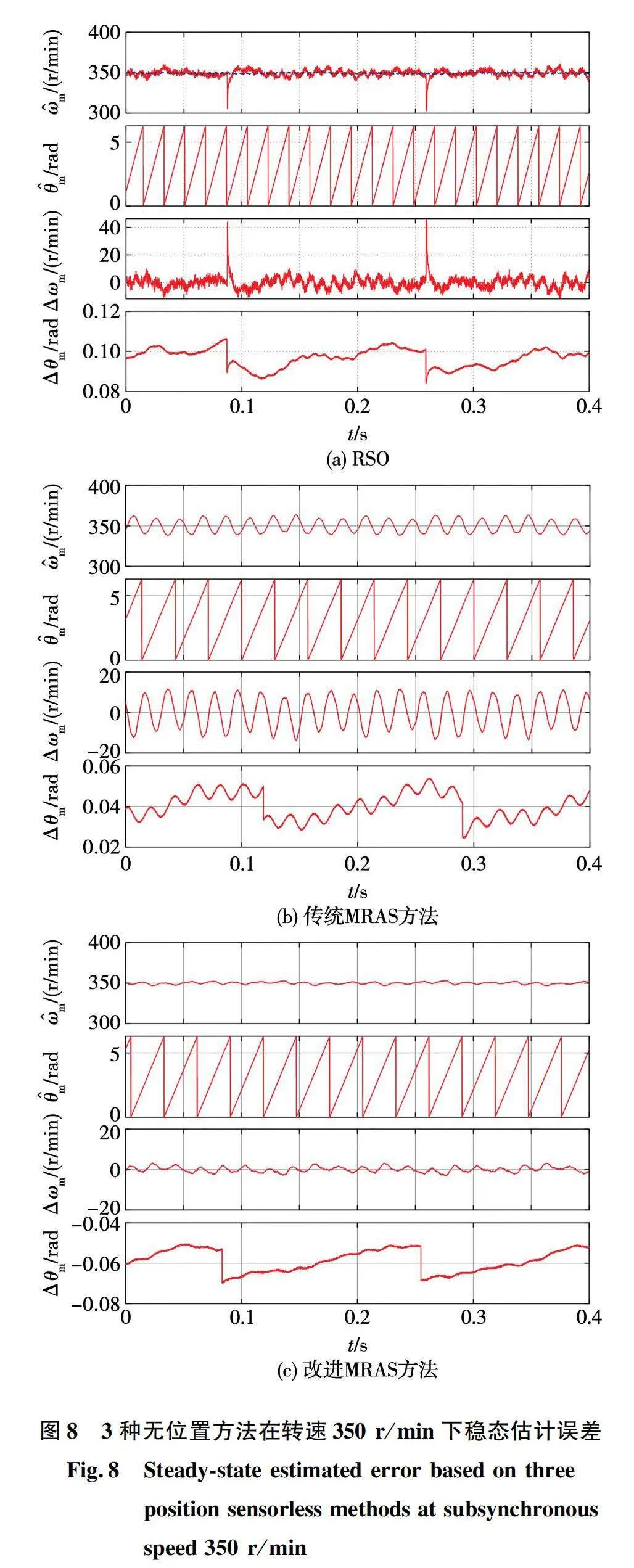
估计的转速及位置误差对比如图8所示,其中展示的4个通道从上往下分别为转子转速、转子位置、估计转速误差和估计位置误差。从图8可以看出3种无位置控制方法估计转速均在实际值附近上下波动,估计位置的误差波动范围较小。但明显地,RSO方法下转速估计出现周期性的脉动,幅值达到40 r/min,传统MRAS方法的估计转速振幅大于改进MRAS方法下的估计转速振幅。传统MRAS方法中,参考模型与可调模型之间误差的非线性使得PI参数整定值受到控制绕组电流采样值的影响,采用固定的PI 值会使部分工况下的控制效果有所折扣。
电机运行在超同步速600 r/min时也能够获得相似的控制效果,说明了方法在不同转速下的有效性。3种无位置方法观测位置信息都存在周期性脉动,其脉动出现的频率与转速有关,当转速为350 r/min时,大约每隔0.17 s(60/350)会出现一次观测脉动;当转速为600 r/min时,间隔时间则为0.1 s。但是相对而言,所提出的改进MRAS方法观测的转速和位置信息脉动幅值较小。
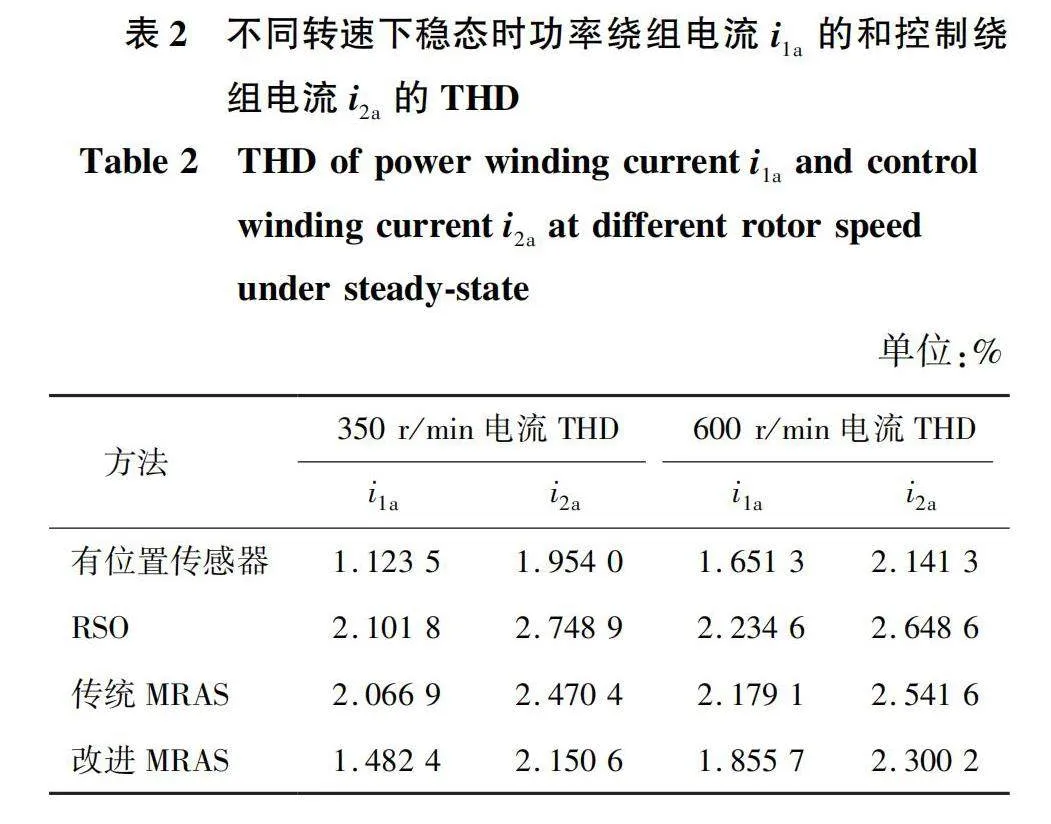
表2展示了基于不同无位置控制方法在次同步速350 r/min和超同步速600 r/min时功率绕组电流和控制绕组电流的THD,电流THD对比使用位置传感器的鲁棒预测控制有所上升,原因是位置估计值与真实值之间存在静差。但电流THD的上升的幅度很小,满足电网要求,特别是所提出的无位置方法下的稳态电流THD相比使用位置传感器时上升仅0.2%左右,说明了所提方法在稳态时的有效性。
3.2 动态实验结果
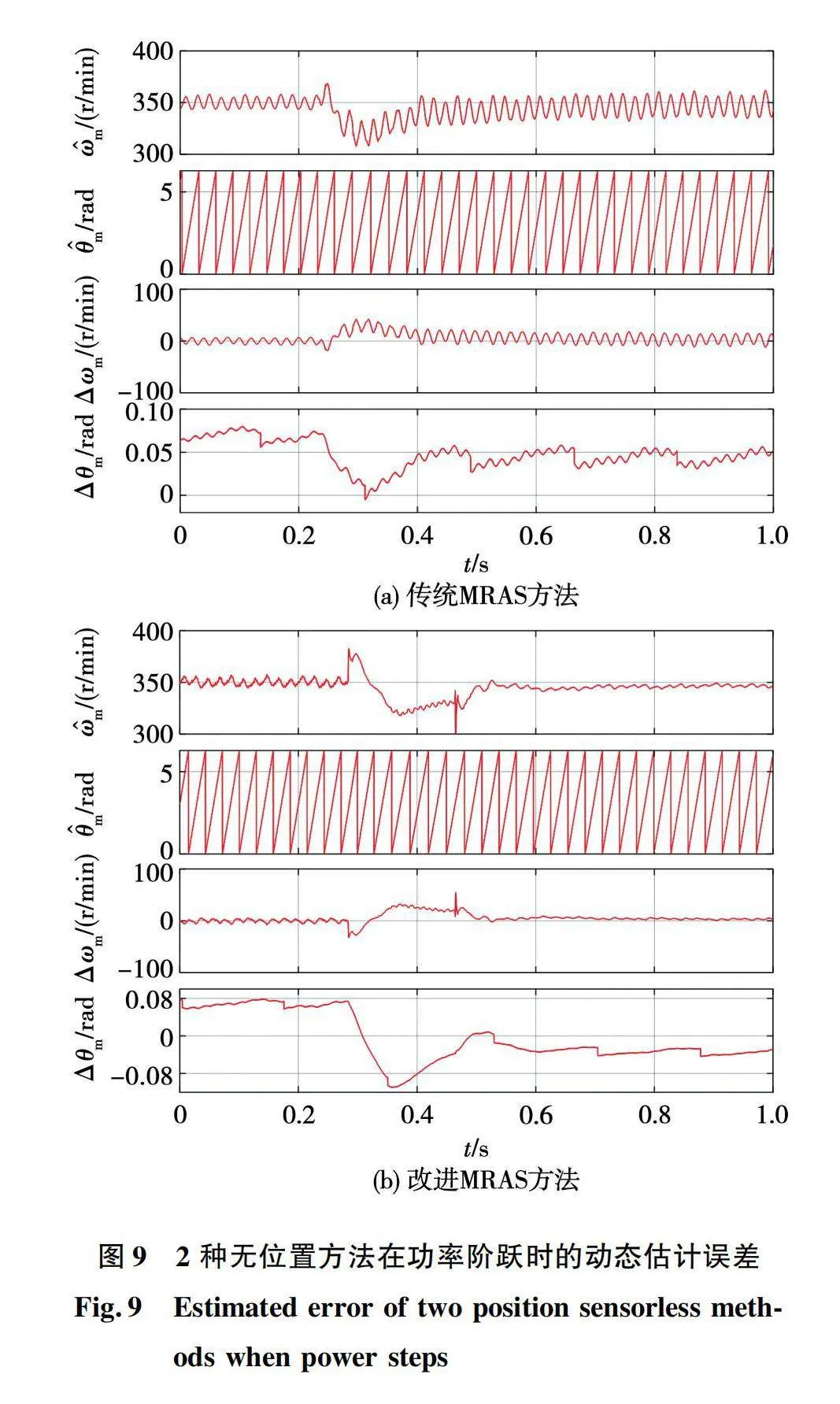
图9为有功功率阶跃动态过程中的两种无位置方法的转速及位置估计误差对比。从观测的误差可以看出,在功率阶跃的瞬间,两种无位置方法观测的转速会出现较大误差,而位置观测误差也发生突变,随着时间推移,观测到转速收敛到实际值,而位置误差稳定在0.05 rad,所提方法的动态过程0.26 s,略慢于传统MRAS。由于基于ESO的鲁棒控制策略的外环中使用了PI控制器,收敛需要时间,功率阶跃的整体响应时间稍长,但最终都能稳定跟踪功率参考值。
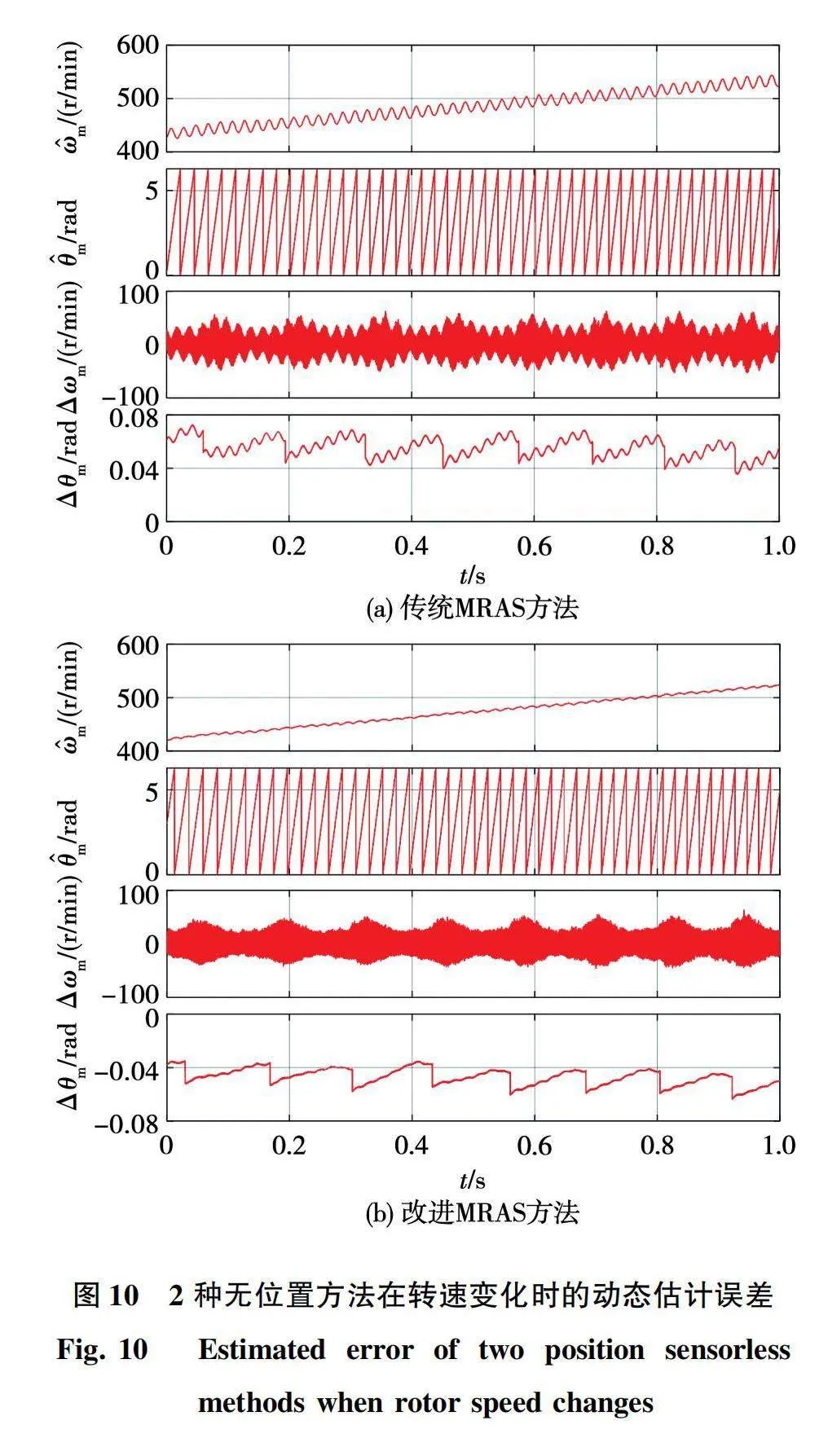
图10为转速变化动态过程中的转速及位置估计误差对比。2种无位置方法观测收敛的速度均快于转速变化的速度,系统整体的效果依然良好。通过对图10中位置误差数据的统计分析得到,传统MRAS方法的估计位置与实际位置的平均误差绝对值为0.055 rad,而改进MRAS方法下位置的平均误差绝对值为0.047 rad。相比于传统方法,改进无位置方法能提供更准确的转速和位置信息,转速的波动幅值更小,位置也更为平滑,从而在转速变化过程中表现出更好的整体控制效果。
3.3 参数鲁棒性实验结果
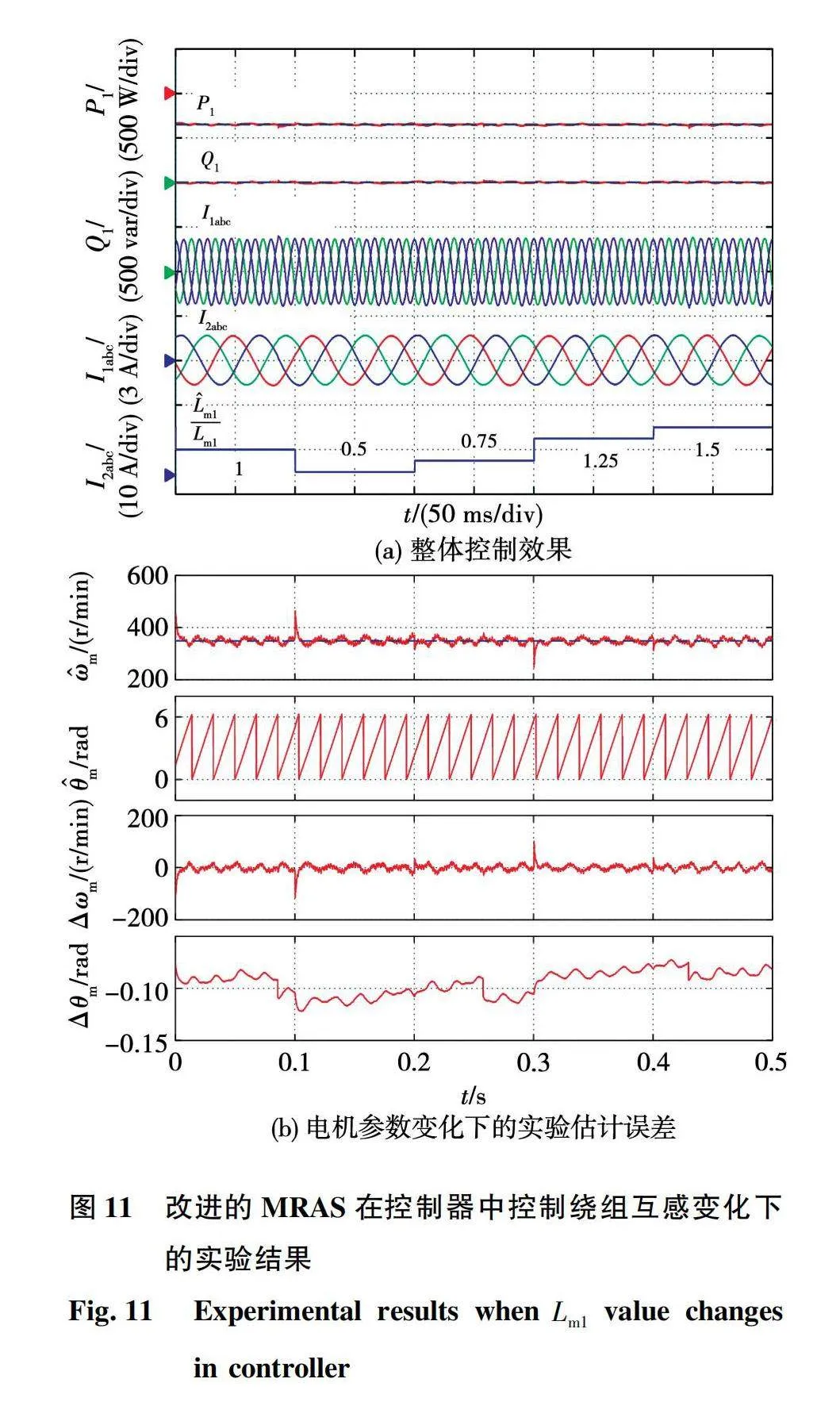
为了验证改进MRAS无位置方法的鲁棒性,图11展示了通过改变控制器中控制电机绕组互感参数Lm1的实验结果。
在图11中,控制器中的电机参数互感Lm1周期性阶跃变化,每0.1 s依次变为真实值的100%、50%、75%、125%、150%。在图11(b)可以看出,在参数变化的瞬间,估计的转速和位置都会出现一定程度的阶跃,但是估计的转速能很快收敛,而估计的位置阶跃的幅值也相对较小,整体的控制效果几乎不受影响,如图11(a)所示。因此,基于改进MRAS的无位置传感器控制有较强的参数鲁棒性。
4 结 论
为解决传统位置传感器一系列问题,在传统MRAS的基础上,提出了一种改进的级联无刷双馈电机无位置传感器控制方法,主要成果如下:
1)选取控制绕组电流作为参考模型,在传统MRAS方法基础上将参考模型和可调模型转换到同步坐标系下,减少了磁链观测器的使用,并将误差线性化,实现起来更为简单;
2)将所提出的MRAS无位置传感器方法与基于扩张状态观测器的鲁棒预测控制结合,在保证位置估计的精确度和动态性能的同时表现出强参数鲁棒性,在电机参数变化时,能够保证良好的控制效果;
3)实验结果说明了所提方法可以在次同步稳态、超同步稳态、功率阶跃和转速变化等各种工况下取得良好的控制效果。相比于RSO和传统MRAS的位置观测,改进方法在不同转速下的稳态电流THD和稳态脉动更小;功率阶跃和转速变化的动态过程中改进MRAS的平均位置误差绝对值与传统MRAS相近,但转速波动幅值更小,位置信息也更平滑;在互感参数变化时,虽然估计的位置稍有偏差,但仍可以实现快速无差的功率跟踪,表现出强鲁棒性。
总之,提出的改进MRAS无位置传感器方法可以在次同步、超同步、功率阶跃和转速变化等各种工况下准确地实时获取转子位置和转速信息,并表现出强鲁棒性,从而无需安装位置传感器,降低了成本又提高了系统的稳定性,具有实用性。
参 考 文 献:
[1]刘吉臻, 马利飞, 王庆华, 等. 海上风电支撑我国能源转型发展的思考[J].中国工程科学,2021,23(1):149.
LIU Jizhen, MA Lifei, WANG Qinghua, et al. Offshore wind power supports China's energy transition [J]. Strategic Study of CAE, 2021, 23(1): 149.
[2]HOSSAIN M A, BODSON M, Control of cascaded/brushless doubly-fed induction motors with real-time torque optimization[J].IEEE Transactions on Industrial Electronics,2023,70(11):11098.
[3]PRYSTUPA D, HUANG Xiaoyan, ZHANG He, et al. Generalized high-frequency injection framework for sensorless control of synchronous reluctance machines[J]. IEEE Open Journal of the Industrial Electronics Society, 2023, 4: 304.
[4]LIU Yi, XU Wei, ZHU Jianguo, et al. Sensorless control of standalone brushless doubly fed induction generator feeding unbalanced loads in a ship shaft power generation system[J]. IEEE Transactions on Industrial Electronics, 2019, 66(1): 739.
[5]MONDAL P, MALAKAR M K, TRIPATHY P. Robust observer design for sensorless voltage and frequency control of a doubly fed induction generator in standalone mode[J]. IEEE Transactions on Energy Conversion, 2022, 37(2): 844.
[6]吴春, 傅子俊, 孙明轩, 等. 基于扩张状态观测器负载转矩补偿的永磁同步电机全速范围无位置传感器控制[J]. 电工技术学报, 2020, 35(S1): 172.
WU Chun, FU Zijun, SUN Mingxuan, et al. Sensorless control of PMSM in all speed range based on extended state observer for load toque compensation[J]. Transactions of China Electrotechnical Society, 2020, 35(S1): 172.
[7]YANG Jian, TANG Weiyi, ZHANG Guanguan, et al. Sensorless control of brushless doubly fed induction machine using a control winding current MRAS observer[J]. IEEE Transactions on Industrial Electronics, 2019, 66(1): 728.
[8]KUMAR M, DAS S, KIRAN K. Sensorless speed estimation of brushless doubly-fed reluctance generator using active power based MRAS[J]. IEEE Transactions on Power Electronics, 2019, 34(8): 7878.
[9]ZHANG Yongchang, JIAO Jian, WANG Zhankuo. Position sensorless deadbeat power control of doubly-fed induction generator based on MRAS observer[C]// 21st International Conference on Electrical Machines and Systems, October 7-10, 2018, Jeju, Korea(South). 2018: 1562.
[10]CIOBOTARU M, AGELIDIS V G, TEODORESCU R, et al. Accurate and less-disturbing active antiislanding method based on PLL for grid-connected converters[J]. IEEE Transactions on Power Electronics, 2010, 25(6): 1576.
[11]万山明, 郑耿哲, 吴芳. 无刷双馈电动机的无编码器控制[J]. 中国电机工程学报, 2018, 38(7): 2144.
WAN Shanming, ZHENG Gengzhe, WU Fang. Encoderless control method of brushless doubly fed machines[J]. Proceedings of the CSEE, 2018, 38(7): 2144.
[12]梅三冠, 卢闻州, 樊启高, 等. 基于滑模观测器误差补偿的永磁同步电机无位置传感器控制策略[J]. 电工技术学报, 2023, 38(2): 398.
MEI Sanguan, LU Wenzhou, FAN Qigao, et al. Sensorless control strategy of permanent magnet synchronous motor based on error compensation estimated by sliding mode observer[J]. Transactions of China Electrotechnical Society, 2023, 38(2): 398.
[13]YAN Xiaoming, CHENG Ming. An MRAS observer-based speed sensorless control method for dual-cage rotor brushless doubly fed induction generator[J]. IEEE Transactions on Power Electronics, 2022, 37(10): 12705.
[14]赵文祥, 刘桓, 陶涛, 等. 基于虚拟信号和高频脉振信号注入的无位置传感器内置式永磁同步电机MTPA控制[J]. 电工技术学报, 2021, 36(24): 5092.
ZHAO Wengxiang, LIU Huan, TAO Tao, et al. MTPA control of sensorless IPMSM based on virtual signal and high-frequency pulsating signal injection[J]. Transactions of China Electrotechnical Society, 2021, 36(24): 5092.
[15]SHIPURKAR U, STROUS T D, POLINDER H, et al. Achieving sensorless control for the brushless doubly fed induction machine[J].IEEE Transactions on Energy Conversion,2017,32(4):1611.
[16]XU Wei, EORAHEEM A K, LIU Yi, et al. An MRAS speed observer based on control winding flux for sensorless control of stand-alone BDFIGs [J]. IEEE Transactions on Power Electronics, 2020, 35(7): 7271.
[17]EBRAHEEM A K, XU Wei, LIU Yi, et al. Sensorless direct voltage control based on MRAS observer for the stand-alone brushless doubly-fed induction generator[C]// 21st International Conference on Electrical Machines and Systems, October 7-10, 2018, Jeju, Korea(South). 2018: 1.
[18]杨长山, 张永昌, 蒋涛. 基于扩张状态观测器的级联无刷双馈电机并网同步和发电鲁棒预测电流控制[J]. 电工技术学报, 2023, 38(22):6094.
YANG Changshan, ZHANG Yongchang, JIANG Tao. Robust predictive current control for grid synchronization and power generation of cascaded brushless doubly-fed generators based on extended state observer[J]. Transactions of China Electrotechnical Society, 2023, 38(22):6094.
[19]程明, 许利通, 曹政, 等. 级联式无刷双馈电机的矢量控制系统和功率流研究[J].电工技术学报,2022,37(20):5164.
CHENG Ming, XU Litong, CAO Zheng, et al. Study on vector control system and power flow of cascaded brushless doubly-fed induction generator[J]. Transactions of China Electrotechnical Society, 2022, 37(20): 5164.
[20]向凡, 许鸣珠. 基于MRAS和磁链补偿的无速度传感器永磁直线同步电机直接推力控制[J]. 电机与控制应用, 2019, 46(8): 18.
XIANG Fan, XU Mingzhu. Speed sensorless direct thrust control of permanent magnet linear synchronous motor based on MRAS and flux compensation[J]. Electric Machines amp; Control Application, 2019, 46(8): 18.
[21]DAUKSHA G, IWANSKI G. Indirect torque control of a cascaded brushless doubly fed induction generator operating with unbalanced power grid[J]. IEEE Transactions on Energy Conversion, 2020, 35(2): 1065.
[22]ZHANG Yongchang, ZHU Jianguo, XU Wei, et al. A simple method to reduce torque ripple in direct torque-controlled permanent-magnet synchronous motor by using vectors with variable amplitude and angle[J]. IEEE Transactions on Industrial Electronics, 2011, 58(7): 2848.
[23]NAIR R, NARAYANAN G. Stator flux based model reference adaptive observers for sensorless vector control and direct voltage control of doubly-fed induction generator[J]. IEEE Transactions on Industry Applications, 2020, 56(4): 3776.
[24]CARDENAS R, PENA R, ALEPUZ S, et al. Overview of control systems for the operation of DFIGs in wind energy applications[J]. IEEE Transactions on Industrial Electronics, 2013, 60(7): 2776.
(编辑:刘琳琳)