基于广义二阶积分器的高频脉振电压注入PMSM无位置传感器控制
2024-11-22周奇勋王一航史柯柯张玉峰杜光辉

摘 要:
传统高频脉振电压注入法需要使用多个滤波器滤除杂波信号,会使系统产生延时且估计误差较大,本文提出广义二阶积分器代替滤波器滤除杂波,实现对转速和转子位置估计精度的提高。针对传统高频脉振电压注入法位置观测精度和动态性能较差的问题,采用一种基于广义二阶积分器的速度环和电流环位置误差信息提取方法。采用广义二阶积分器代替位置观测闭环的带通滤波器和低通滤波器,提取电机速度和转子位置信息,简化参数整定过程,提高位置观测精度;同时用2个广义二阶积分器串联取代电流环中的低通滤波器,提取基频电流分量,增加电流环带宽,减小系统延时。仿真和实验结果表明,该方法提高了位置观测精度和系统的动态响应性能。
关键词:永磁同步电机;无位置传感器;高频脉振电压注入法;广义二阶积分器;电流环;参数整定
DOI:10.15938/j.emc.2024.09.016
中图分类号:TM351
文献标志码:A
文章编号:1007-449X(2024)09-0179-10
收稿日期: 2023-03-06
基金项目:陕西省重点研发计划项目(2023-YBGY-368);学位与研究生教育教学改革项目(2023-XUST-31)
作者简介:周奇勋(1979—),男,博士,副教授,研究方向为电机系统及其控制;
王一航(1998—),男,硕士研究生,研究方向为永磁同步电机系统及其控制;
史柯柯(2000—),男,硕士研究生,研究方向为电机系统及其控制;
张玉峰(1977—),男,博士,副教授,研究方向为永磁电机的设计和控制;
杜光辉(1987—),男,博士,教授,博士生导师,研究方向为永磁电机设计。
通信作者:周奇勋
Sensorless control of PMSM with HF pulsating voltage injection based on second-order generalized integrator
ZHOU Qixun, WANG Yihang, SHI Keke, ZHANG Yufeng, DU Guanghui
(School of Electric and Control Engineering, Xi’an University of Science and Technology, Xi’an 710054, China)
Abstract:
The traditional high frequency pulsating voltage injection method needs to use multiple filters to filter out the clutter signal, which will cause the system to delay and the estimation error is large. It was proposed to use the generalized second order integrator instead of the filter to filter out the clutter, so as to improve the estimation accuracy of the speed and rotor position. Aiming at the problem of poor position observation accuracy and dynamic performance of traditional high frequency pulsating voltage injection method, a position error information extraction method of speed loop and current loop based on generalized second order integrator was adopted. In this method, the generalized second-order integrator was used to replace the band-pass filter and low-pass filter of the position observation closed-loop to extract the motor speed and rotor position information, simplify the parameter setting process and improve the position observation accuracy. At the same time, the low-pass filter in the current loop was replaced by two generalized second-order integrators in series to extract the fundamental frequency current component, increase the bandwidth of the current loop and reduce the system delay. The simulation and experimental results show that the method improves the position observation accuracy and the dynamic response performance of the system.
Keywords:permanent magnet synchronous motor; position sensorless; high-frequency pulsating voltage injection method; second-order generalized integrator; electric current loop; parament adjustment
0 引 言
永磁同步电机(permanent magnet synchronous machine,PMSM)因具有高功率密度、高效率、低制造成本,而在生活和工业生产中得到广泛应用[1-4]。通常需要在PMSM上安装机械式位置传感器,来获取精确的转子位置信息。但机械式位置传感器存在安装困难、接线复杂以及在一些极端环境下容易失效等问题[5-8]。因此,PMSM无位置传感器技术成为近年来的研究热点[9-11]。
现有的无位置传感器技术主要分为基于反电势观测的方法和基于凸极特性跟踪的方法。基于反电势观测的方法主要用于中高速段,包括模型参考自适应法、滑模观测器法等;基于凸极特性跟踪的方法主要用于零低速段,包括高频旋转电压注入法、高频脉振电压注入法等。其中零低速段是研究的难点,当电机运行在零速或低速工况下时,电机端口反电势幅值小、信噪比低,很难检测转子位置信息[12-13]。针对永磁同步电机的零低速位置检测控制,最常用的方法之一是高频脉振电压注入法[14-16]。高频脉振电压注入法将高频电压信号注入旋转参考坐标系直轴,通过检测响应信号中的高频信息来获取转子位置[17-18]。由于控制系统非理想因素对高频脉振电压注入法影响很小,从而使其有较高的位置估计精度,故受到国内外学者的广泛青睐。
高频脉振电压注入法,在信号处理过程中需要使用带通滤波器(band pass filter,BPF)和低通滤波器(low pass filter,LPF)来滤除杂波信号,限制了电流环和速度环的带宽,影响了系统的动态观测性能和滤波精度[19-20]。为此,文献[21]采用一种小滤波器取代传统的BPF,为了减少系统中的高频噪声,通过降低注入高频电压的幅值,但并没有克服滤波器的延时问题。文献[22]采用双频陷波器(dual frequency notch filter,DFNF)级联LPF的位置误差信号提取策略,可以同时兼顾位置观测闭环的滤波精度和动态性能,但是由于位置观测闭环和电流环仍然含有多个LPF,使位置信息的提取仍然存在一定的延时。文献[23]分析电机参数不对称及电流检测误差等非理想因素所导致的位置检测误差,提出利用全通滤波器构成自适应滤波模块提取高频分量并消除上述谐波误差。针对多个滤波器对位置检测精度和动态性能的影响问题,上述研究都取得了一定成果,但并未对电流环中滤波器所带来的问题进行探究。
为此,提出一种基于广义二阶积分器(second-order generalized integrator,SOGI)的改进型高频脉振电压注入法,首先采用2个SOGI取代位置环中的BPF和LPF,提高转子位置观测精度;然后再用2个SOGI串联取代电流环中的LPF,提高电流环带宽。从而兼顾整个系统的动态性能和滤波精度问题。
1 高频脉振电压注入法
1.1 高频脉振电压注入法原理
1.2 位置误差信息提取策略
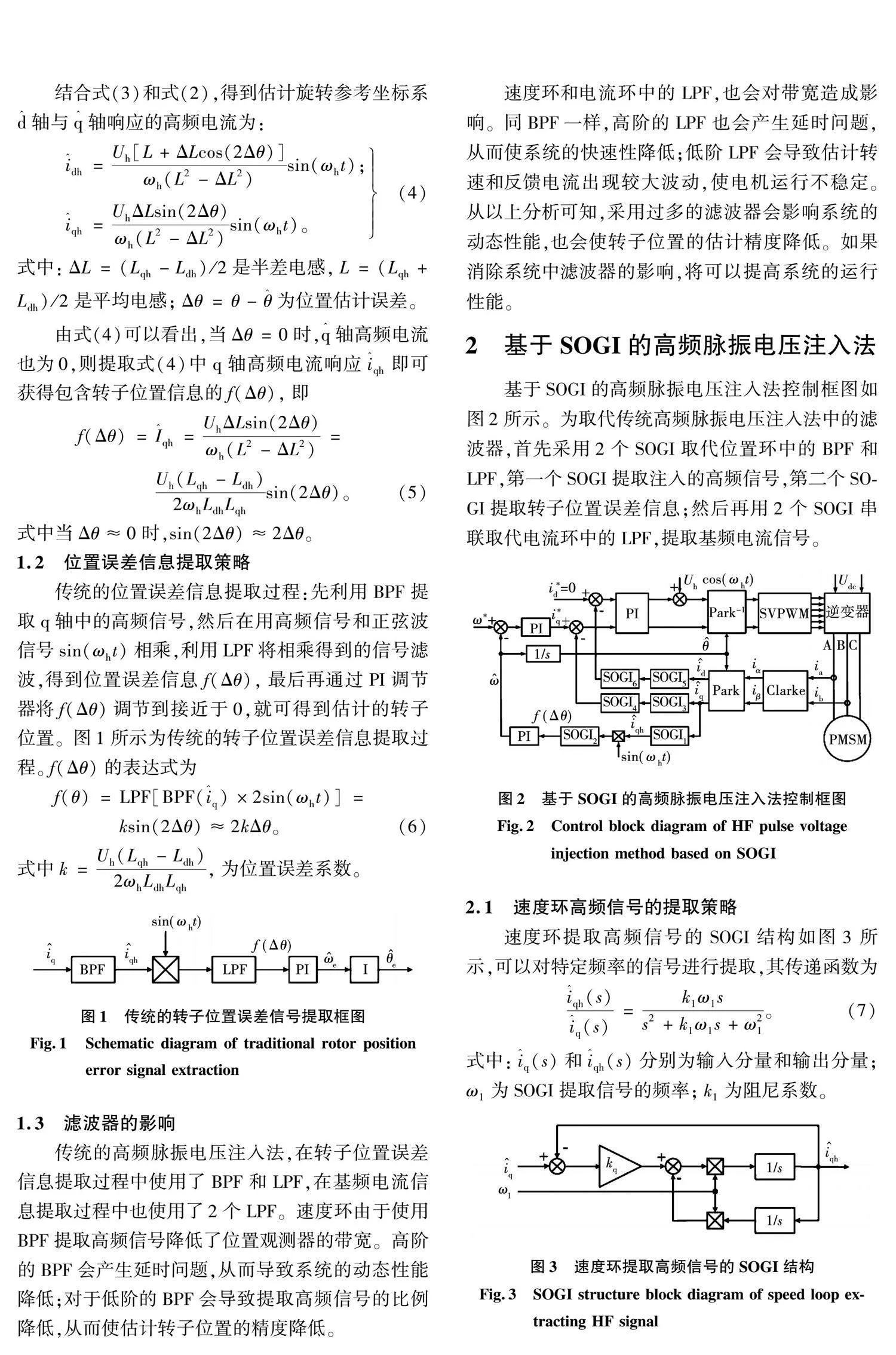
传统的位置误差信息提取过程:先利用BPF提取q轴中的高频信号,然后在用高频信号和正弦波信号sin(ωht)相乘,利用LPF将相乘得到的信号滤波,得到位置误差信息f(Δθ),最后再通过PI调节器将f(Δθ)调节到接近于0,就可得到估计的转子位置。图1所示为传统的转子位置误差信息提取过程。f(Δθ)的表达式为
f(θ)=LPF[BPF(i^q)×2sin(ωht)]=ksin(2Δθ)≈2kΔθ。(6)
式中k=Uh(Lqh-Ldh)2ωhLdhLqh,为位置误差系数。
1.3 滤波器的影响
传统的高频脉振电压注入法,在转子位置误差信息提取过程中使用了BPF和LPF,在基频电流信息提取过程中也使用了2个LPF。速度环由于使用BPF提取高频信号降低了位置观测器的带宽。高阶的BPF会产生延时问题,从而导致系统的动态性能降低;对于低阶的BPF会导致提取高频信号的比例降低,从而使估计转子位置的精度降低。
速度环和电流环中的LPF,也会对带宽造成影响。同BPF一样,高阶的LPF也会产生延时问题,从而使系统的快速性降低;低阶LPF会导致估计转速和反馈电流出现较大波动,使电机运行不稳定。从以上分析可知,采用过多的滤波器会影响系统的动态性能,也会使转子位置的估计精度降低。如果消除系统中滤波器的影响,将可以提高系统的运行性能。
2 基于SOGI的高频脉振电压注入法
基于SOGI的高频脉振电压注入法控制框图如图2所示。为取代传统高频脉振电压注入法中的滤波器,首先采用2个SOGI取代位置环中的BPF和LPF,第一个SOGI提取注入的高频信号,第二个SOGI提取转子位置误差信息;然后再用2个SOGI串联取代电流环中的LPF,提取基频电流信号。
2.1 速度环高频信号的提取策略
速度环提取高频信号的SOGI结构如图3所示,可以对特定频率的信号进行提取,其传递函数为
i^qh(s)i^q(s)=k1ω1ss2+k1ω1s+ω21。(7)
式中:i^q(s)和i^qh(s)分别为输入分量和输出分量;ω1为SOGI提取信号的频率;k1为阻尼系数。
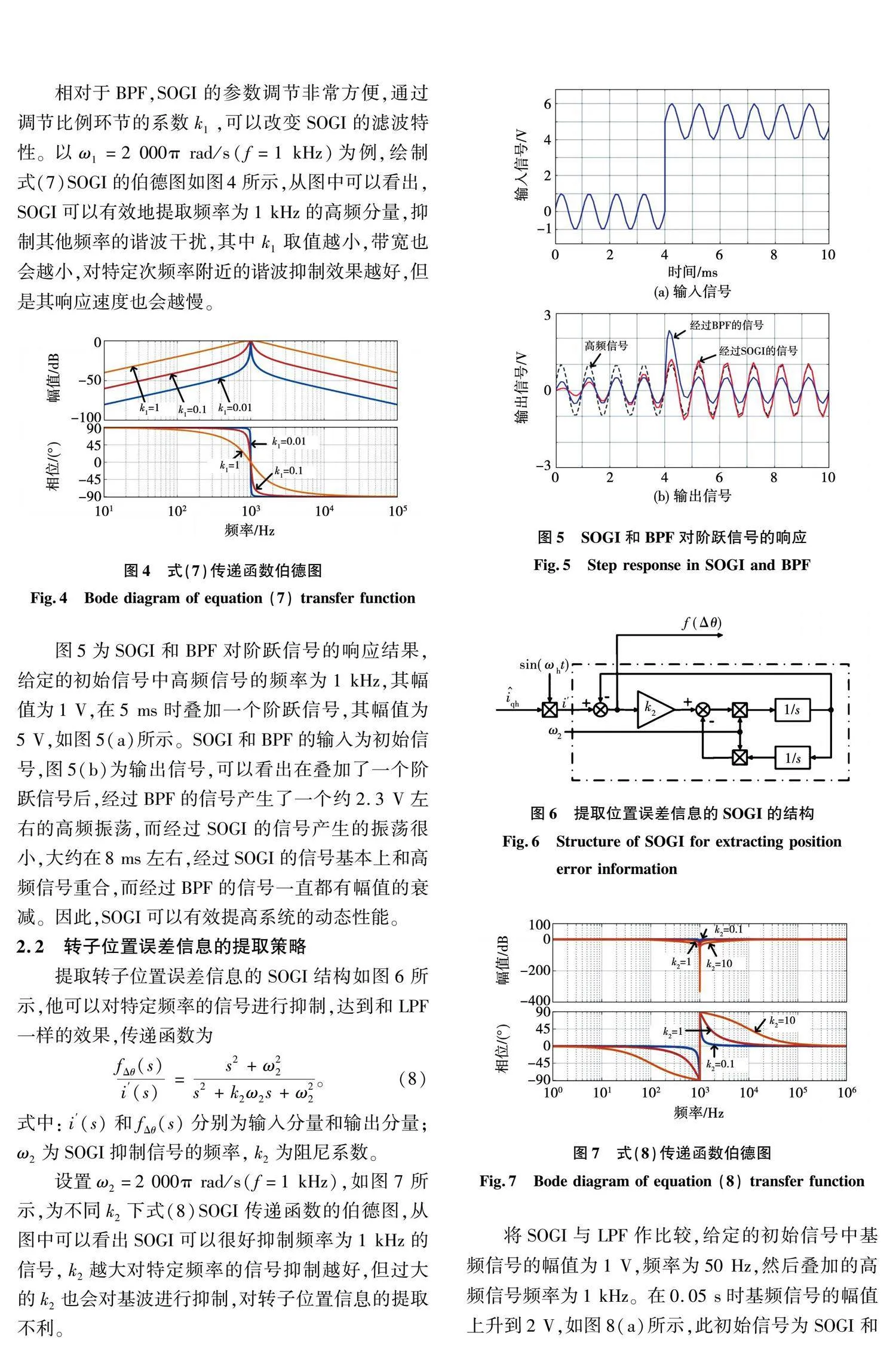
相对于BPF,SOGI的参数调节非常方便,通过调节比例环节的系数k1,可以改变SOGI的滤波特性。以ω1=2 000π rad/s(f=1 kHz)为例,绘制式(7)SOGI的伯德图如图4所示,从图中可以看出,SOGI可以有效地提取频率为1 kHz的高频分量,抑制其他频率的谐波干扰,其中k1取值越小,带宽也会越小,对特定次频率附近的谐波抑制效果越好,但是其响应速度也会越慢。
图5为SOGI和BPF对阶跃信号的响应结果,给定的初始信号中高频信号的频率为1 kHz,其幅值为1 V,在5 ms时叠加一个阶跃信号,其幅值为5 V,如图5(a)所示。SOGI和BPF的输入为初始信号,图5(b)为输出信号,可以看出在叠加了一个阶跃信号后,经过BPF的信号产生了一个约2.3 V左右的高频振荡,而经过SOGI的信号产生的振荡很小,大约在8 ms左右,经过SOGI的信号基本上和高频信号重合,而经过BPF的信号一直都有幅值的衰减。因此,SOGI可以有效提高系统的动态性能。
2.2 转子位置误差信息的提取策略
提取转子位置误差信息的SOGI结构如图6所示,他可以对特定频率的信号进行抑制,达到和LPF一样的效果,传递函数为
fΔθ(s)i′(s)=s2+ω22s2+k2ω2s+ω22。(8)
式中:i′(s)和fΔθ(s)分别为输入分量和输出分量;ω2为SOGI抑制信号的频率,k2为阻尼系数。
设置ω2=2 000π rad/s(f=1 kHz),如图7所示,为不同k2下式(8)SOGI传递函数的伯德图,从图中可以看出SOGI可以很好抑制频率为1 kHz的信号,k2越大对特定频率的信号抑制越好,但过大的k2也会对基波进行抑制,对转子位置信息的提取不利。
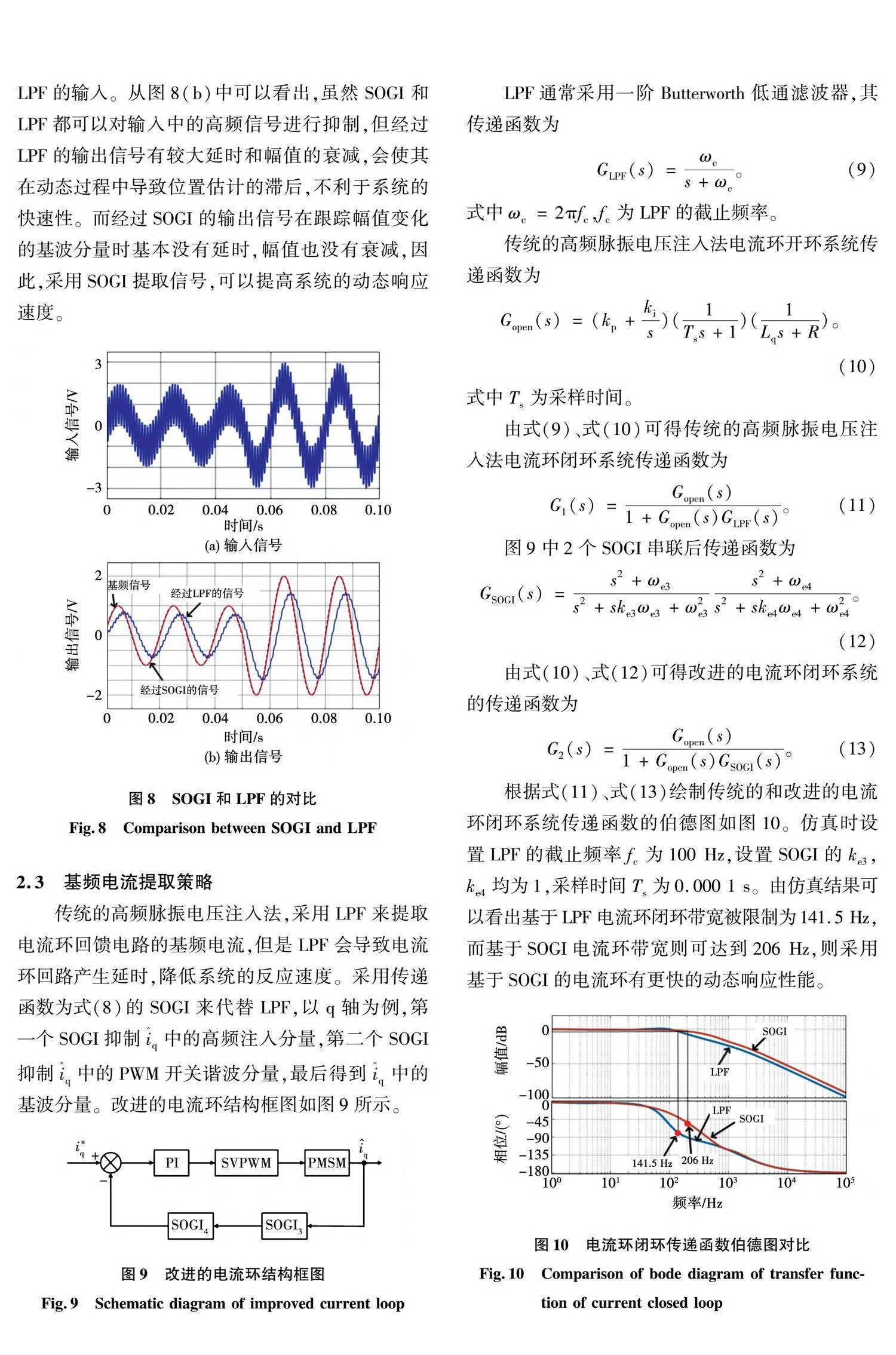
将SOGI与LPF作比较,给定的初始信号中基频信号的幅值为1 V,频率为50 Hz,然后叠加的高频信号频率为1 kHz。在0.05 s时基频信号的幅值上升到2 V,如图8(a)所示,此初始信号为SOGI和LPF的输入。从图8(b)中可以看出,虽然SOGI和LPF都可以对输入中的高频信号进行抑制,但经过LPF的输出信号有较大延时和幅值的衰减,会使其在动态过程中导致位置估计的滞后,不利于系统的快速性。而经过SOGI的输出信号在跟踪幅值变化的基波分量时基本没有延时,幅值也没有衰减,因此,采用SOGI提取信号,可以提高系统的动态响应速度。
2.3 基频电流提取策略
传统的高频脉振电压注入法,采用LPF来提取电流环回馈电路的基频电流,但是LPF会导致电流环回路产生延时,降低系统的反应速度。采用传递函数为式(8)的SOGI来代替LPF,以q轴为例,第一个SOGI抑制i^q中的高频注入分量,第二个SOGI抑制i^q中的PWM开关谐波分量,最后得到i^q中的基波分量。改进的电流环结构框图如图9所示。
根据式(11)、式(13)绘制传统的和改进的电流环闭环系统传递函数的伯德图如图10。仿真时设置LPF的截止频率fc为100 Hz,设置SOGI的ke3,ke4均为1,采样时间Ts为0.000 1 s。由仿真结果可以看出基于LPF电流环闭环带宽被限制为141.5 Hz,而基于SOGI电流环带宽则可达到206 Hz,则采用基于SOGI的电流环有更快的动态响应性能。
3 仿真结果与分析
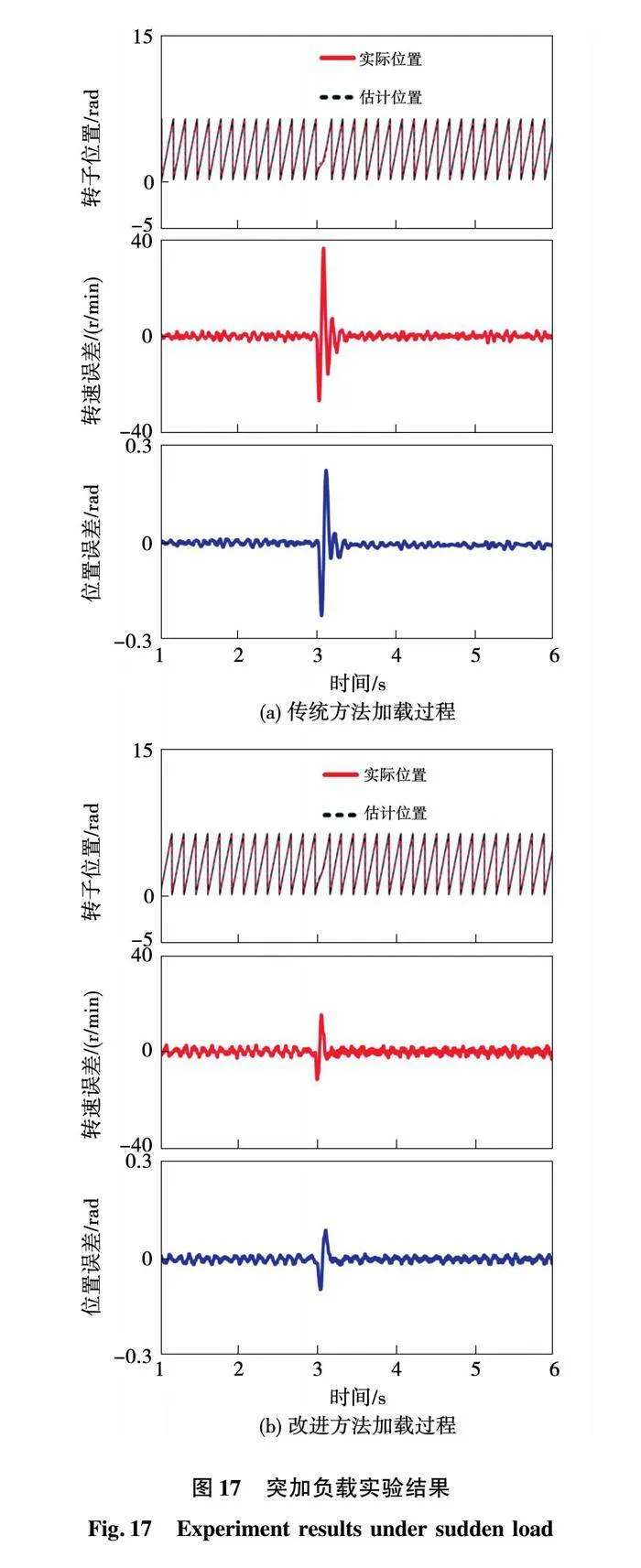
首先在MATLAB/Simulink中搭建仿真模型验证所提方法的有效性。如表1所示为电机参数。注入频率为1 kHz的高频电压,其幅值为40 V;逆变器的开关频率为10 kHz,死区时间为2 μs。
3.1 起动过程位置辨识性能验证
图11(a)和(b)为在空载下,2种方法给定转速50 r/min,转速实际值、估计值及转速误差波形和转子位置实际值、估计值及位置误差波形。从图中可以看出,起动瞬间传统方法转速误差为-16~28 r/min,转子位置误差最大为0.25 rad,经过0.4 s稳定。改进方法启动瞬间转速误差为-10~22 r/min,转子位置误差最大为0.16 rad,经过0.23 s稳定。可以看出采用改进方法,在起动瞬间转速误差以及位置误差都更小,而且采用改进方法趋于稳定的速度也更快,即提升了位置辨识精度,也减小了延迟时间。
3.2 转速突变位置辨识性能验证
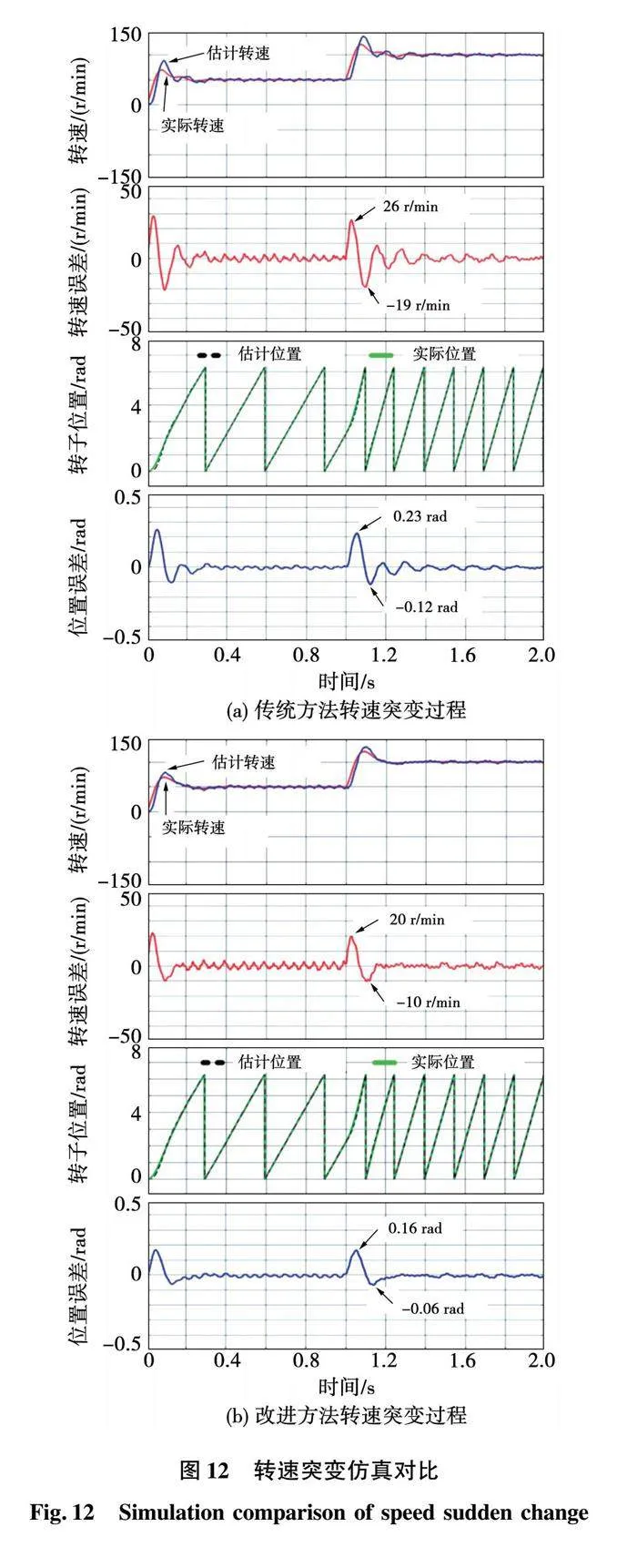
为验证改进方法的动态跟踪性能,给定电机转速从50 r/min阶跃至100 r/min,图12为转速及转子位置波形对比。由图12(a)可知,转速突变时传统方法产生的转速误差波动约为-19~26 r/min,位置误差波动约为-0.12~0.23 rad。采用改进方法,结果如图12(b)所示,转速误差波动减小至-10~20 r/min,转子位置误差波动减小至-0.06~0.16 rad,由以上分析可知相较于传统方法,改进方法在转速突变时转速波动更小,有更好的动态性能。
3.3 负载突变位置辨识性能验证
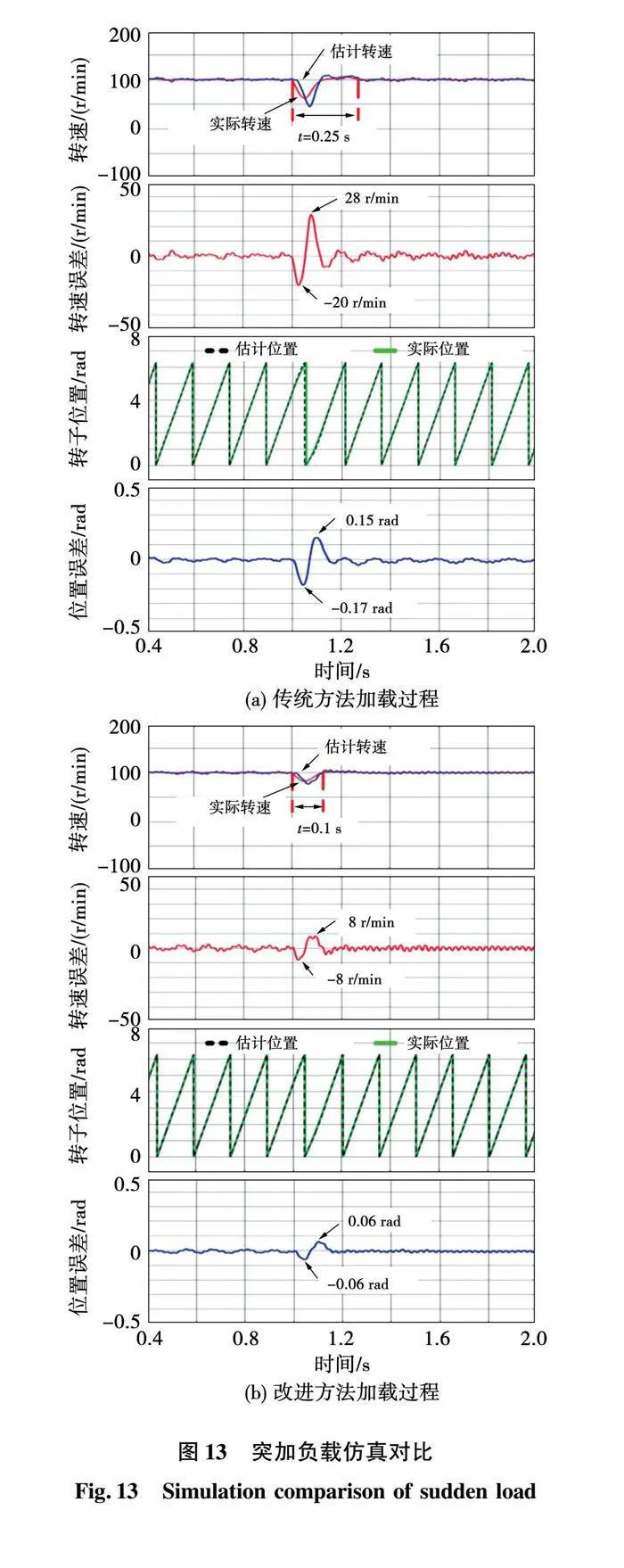
图13为电机在100 r/min的转速下,在1 s时突加5 N·m负载(50%额定负载)的转速误差及转子位置误差波形。
从图中可以看出,突加负载时,传统方法转速下降到60 r/min左右,约0.25 s后稳定,产生的转速误差约为-20~28 r/min,位置误差约为-0.17~0.15 rad;突加负载时,改进方法转速下降到80 r/min左右,约0.1 s稳定,产生的转速误差为-8~8 r/min,位置误差约为-0.06~0.06 rad。可以看出相对于传统方法,改进方法提高了位置环和电流环的抗扰动性能。
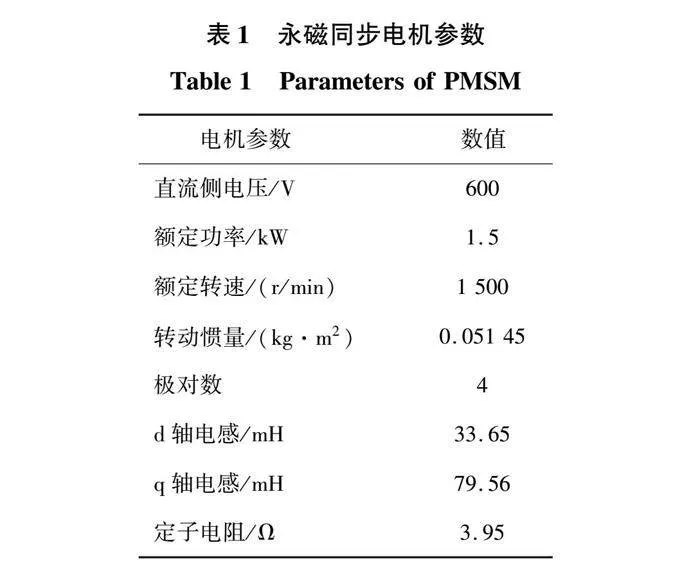
4 实验结果与分析
为了进一步验证本文所提方法的可行性,在研旭YXSPACE-SP2000实验平台上进行验证,如图14所示。其实验电机参数和仿真电机参数一样。
4.1 起动过程位置辨识性能验证
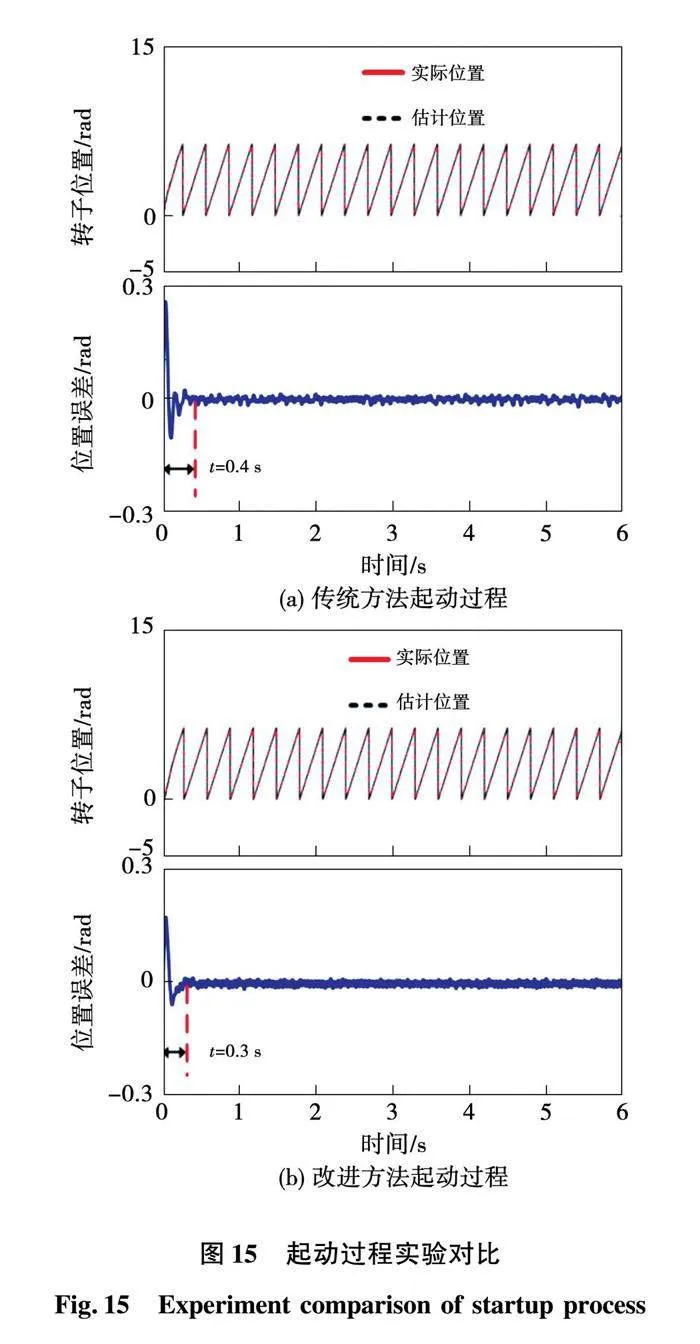
图15为电机在空载条件下,给定目标转速为50 r/min的起动过程转子位置和误差实验波形图。
从图中可以看出起动瞬间,传统方法转子位置误差最大为0.25 rad,经过0.4 s达到稳定;改进方法转子位置误差最大为0.17 rad,经过0.3 s达到稳定。从以上分析可知,采用改进方法起动过程转子位置观测精度更高,相较于传统方法位置观测精度提高了32%左右;改进方法起动过程达到稳定的速度也更快,减小了延时。
4.2 转速突变位置辨识性能验证
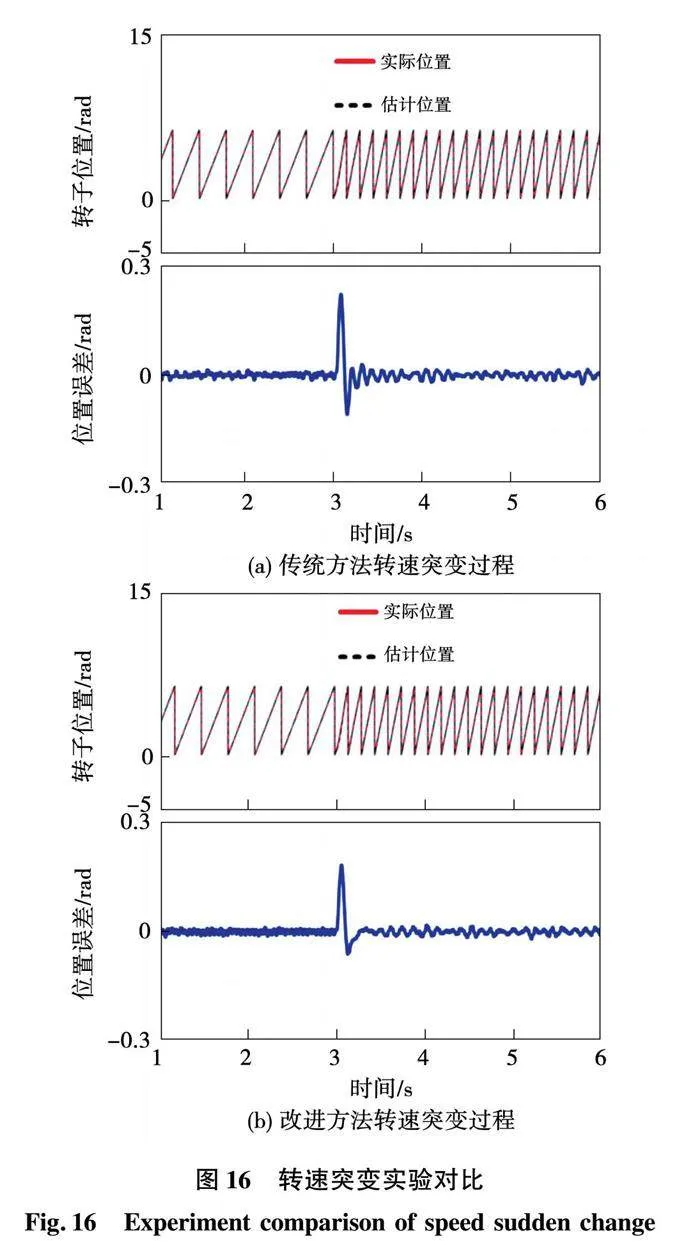
图16为电机开始在50 r/min下转动,在3 s时将转速指令突变为100 r/min的转子位置和误差实验波形图。
从图中可以看出,在转速突变时,传统方法转子位置误差最大为0.25 rad,而改进方法转子位置误差最大为0.17 rad,相对于传统方法位置观测精度提高了32%左右。
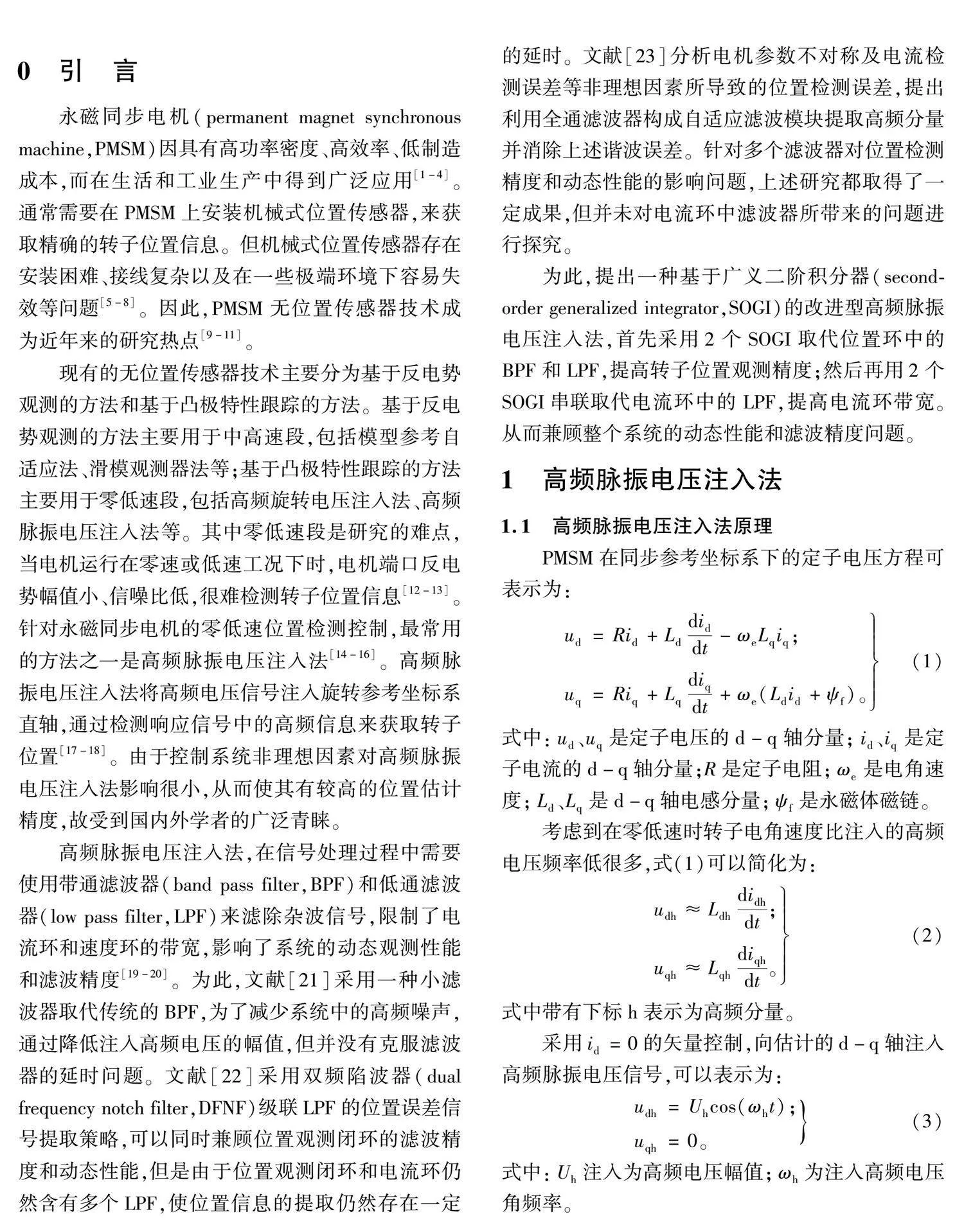
4.3 负载突变位置辨识性能验证
图17为电机运行在100 r/min转速下,在3 s时突加5 N·m的负载(50%额定负载)得到的转子位置、转速误差和位置误差实验波形图。
从图中可以看出加载瞬间,传统方法转速误差最大为36 r/min,位置误差最大为-0.23 rad;改进方法转速误差最大为15 r/min,位置误差最大为-0.1 rad。相对于传统方法,改进方法加载瞬间,转速波动更小,趋于稳定速度更快,位置观测精度提高了56%左右,可以看出改进方法抗干扰能力更强。
5 结 论
分析了传统高频脉振电压注入法速度环和电流环中滤波器的影响,并指出该方法不能同时兼顾位置误差观测精度和系统动态性能。提出一种基于SOGI的改进型高频脉振电压注入法,利用SOGI代替速度环和电流环中的滤波器,减小了参数整定困难,提高了速度环和电流环的滤波精度及动态性能。仿真和实验结果显示,相较于传统的方法,改进方法可以有效提高位置观测精度,减小电机运行状态突变对转子位置观测的干扰,提升系统的动态响应性能。
参 考 文 献:
[1] XU Wei, JIANG Yajie, MU Chaoxu, et al. Improved nonlinear flux observer based second-order SOIFO for PMSM sensorless control[J].IEEE Transactions on Power Electronics,2019,34(1):565.
[2] 李垣江, 董鑫, 魏海峰, 等. 表贴式永磁同步电机转速环复合PI无位置传感器控制[J].电工技术学报, 2020, 35(10): 2119.
LI Yuanjiang, DONG Xin, WEI Haifeng, et al. Sensorless compound PI control for surface permanent magnet synchronous motor speed regulation system[J]. Transactions of China Electrotechnical Society, 2020, 35(10): 2119.
[3] 李孟秋, 王龙. 一种改进的永磁同步电机低速无位置传感器控制策略[J].电工技术学报, 2018, 33(9): 1967.
LI Mengqiu, WANG Long. An improved low speed sensorless control strategy for permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2018, 33(9): 1967.
[4] 周奇勋, 刘帆, 吴紫辉, 等. 永磁同步电机转矩与定子磁链模型预测控制预测误差补偿方法[J].电工技术学报, 2022, 37(22): 5728.
ZHOU Qixun, LIU Fan, WU Zihui, et al. Model predictive torque and stator flux control method for PMSMs with prediction error compensation[J]. Transactions of China Electrotechnical Society, 2022, 37(22): 5728.
[5] LASCU C, ANDREESCU G D. PLL position and speed observer with integrated current observer for sensorless PMSM drives[J].IEEE Transactions on Industrial Electronics,2020,67(7):5990.
[6] TANG Qipeng, SHEN Anwen, LUO Xin, et al. IPMSM sensorless control by injecting bidirectional rotating HF carrier signals[J]. IEEE Transactions on Power Electronics, 2018, 33(12): 10698.
[7] 周奇勋, 马平安, 周勇, 等. 双高频方波注入法双绕组永磁同步电机无位置传感器控制[J]. 西北工业大学学报, 2022, 40(6): 1352.
ZHOU Qixun, MA Pingan, ZHOU Yong, et al. Dual high frequency square wave injection method for dual winding permanent magnet synchronous motor sensorless control[J]. Journal of Northwestern Polytechnical University, 2022, 40(6): 1352.
[8] 康尔良, 陈健. 永磁同步电机改进滑模无位置传感器控制[J]. 电机与控制学报, 2022, 26(10): 88.
KANG Erliang, CHEN Jian. Improved sliding mode sensorless control of permanent magnet synchronous motor[J]. Electric Machines and Control, 2022, 26(10): 88.
[9] 张荣芸, 方星晖, 时培成, 等. 基于改进PSO优化的IPMSM全速域无传感器控制[J].电机与控制学报,2022,26(9):130.
ZHANG Rongyun, FANG Xinghui, SHI Peicheng, et al. Full speed range sensorless control of IPMSM based on improved PSO optimization[J].Electric Machines and Control,2022,26(9):130.
[10] TANG Qipeng, SHEN Anwen, LUO Xin, et al. PMSM sensorless control by injecting HF pulsating carrier signal into ABC frame[J]. IEEE Transactions on Power Electronics, 2017, 32(5): 3767.
[11] VERRELLI C M, BIFARETTI S, CARFAGNA E, et al. Speed sensor fault tolerant PMSM machines: from position-sensorless to sensorless control[J]. IEEE Transactions on Industry Applications, 2019, 55(4): 3946.
[12] 王明辉, 徐永向, 邹继斌. 基于ESO-PLL的永磁同步电机无位置传感器控制[J].中国电机工程学报, 2022, 42(20): 7599.
WANG Minghui, XU Yongxiang, ZOU Jibin. Sensorless control for permanent magnet synchronous motor based on ESO-PLL [J]. Proceedings of the CSEE, 2022, 42(20): 7599.
[13] 李文真, 刘景林, 陈双双. 基于高频方波信号注入法的永磁同步电机转子位置检测方法[J].电工技术学报,2018, 33(24): 5821.
LI Wenzhen, LIU Jinglin, CHEN Shuangshuang. Permanent magnet synchronous motor rotor position detection method based on high-frequency square wave signal injection [J]. Transactions of China Electrotechnical Society, 2018, 33(24): 5821.
[14] 李浩源, 张兴, 杨淑英, 等. 基于高频信号注入的永磁同步电机无传感器控制技术综述[J].电工技术学报,2018, 33(12): 2653.
LI Haoyuan, ZHANG Xing, YANG Shuying, et al. Review on sensorless control of permanent magnet synchronous motor based on high-frequency signal injection [J]. Transactions of China Electrotechnical Society, 2018, 33(12): 2653.
[15] ZHANG Xing, LI Haoyuan, YANG Shuying, et al. Improved initial rotor position estimation for PMSM drives based on HF pulsating voltage signal injection[J]. IEEE Transactions on Industrial Electronics, 2018, 65(6): 4702.
[16] LUO X, TANG Q, SHEN A, et al. PMSM sensorless control by injecting HF pulsating carrier signal into estimated fixed-frequency rotating reference frame[J]. IEEE Transactions on Industrial Electronics, 2016, 63(4): 2294.
[17] 鲁家栋, 刘景林. 内置式永磁同步电机低速无位置传感器控制[J].电机与控制学报, 2018, 22(3): 88.
LU Jiadong, LIU Jinglin. Low-speed position sensorless control of IPMSM based on high frequency signal injection[J]. Electric Machines and Control, 2018, 22(3): 88.
[18] YU Kailiang, WANG Zheng. Position sensorless control of IPMSM using adjustable frequency setting square-wave voltage injection[J]. IEEE Transactions on Power Electronics, 2022, 37(11): 12973.
[19] ZAIM S, NAHID M B, MEIBODY T F. Robust" position sensorless control of nonsalient PMSM at standstill and low speeds[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2014, 2(3): 640.
[20] 杜思宸, 全力, 朱孝勇, 等. 基于高频注入的永磁同步电机零低速下位置传感器失效故障容错控制[J].中国电机工程学报, 2019, 39(10): 3038.
DU Sichen, QUAN Li, ZHU Xiaoyong, et al. Fault-tolerant control of position sensor failure for PMSM at zero and low speed based on high frequency injection[J]. Proceedings of the CSEE, 2019, 39(10): 3038.
[21] MOHAMMED O A, KHAN A A, TALLAWY A M, et al. A wavelet filtering scheme for noise and vibration reduction in high-frequency signal injection based sensorless control of PMSM at low speed[J]. IEEE Transactions on Energy Conversion, 2012, 27(2): 250.
[22] 刘计龙, 付康壮, 麦志勤, 等. 基于双频陷波器的改进型高频脉振电压注入无位置传感器控制策略[J].中国电机工程学报, 2021, 41(2): 749.
LIU Jilong, FU Kangzhuang, MAI Zhiqin, et al." Sensorless control strategy of improved HF pulsating voltage injection based on dual frequency notch filter[J]. Proceedings of the CSEE, 2021, 41(2): 749.
[23] 刘兵, 周波. 脉振高频电压注入SPMSM无位置传感器控制的估计误差分析与抑制方法[J].中国电机工程学报, 2018, 38(14): 4232.
LIU Bing, ZHOU Bo. Analysis and compensation of position estimation error in SPMSM sensorless control based on high frequency pulsating voltage injection[J]. Proceedings of the CSEE, 2018, 38(14): 4232.
(编辑:刘琳琳)
