基于双MPC与变斜率I/f的SPMSM快速启动控制策略研究
2024-11-22刘普崔艺博王聪韩坤常忠廷
摘 要:
为了表贴式永磁同步电机(SPMSM)快速启动应用,针对现有恒流频比控制(I/f)启动采用固定参考斜率导致启动慢以及后续投切为双PI闭环磁场定向控制(FOC)策略动态响应能力不足的问题,提出一种内、外环均采用模型预测控制(MPC)策略的SPMSM变斜率I/f(DI/f)启动控制策略。首先通过模型预测推算出下一时刻的转子位置、转速。其中转速用于估算负载转矩,转子位置等效为变斜率I/f启动中的动态参考频率,构成变DI/f启动。当电机转速达到设定转速后,系统自动投切为双闭环MPC控制。模型预测转速外环通过当前转速与估算负载计算下一时刻q轴电流的额定值,实现启动到稳态的平稳快速切换。仿真与实验结果验证该算法的可行性与有效性,并使永磁同步电机的启动上升时间缩短了41.9%,调节时间缩短了41.1%。
关键词:永磁同步电机;I/f控制;磁场定向控制;模型预测控制;复合控制;动态响应
DOI:10.15938/j.emc.2024.09.013
中图分类号:TM351;TM341
文献标志码:A
文章编号:1007-449X(2024)09-0151-11
收稿日期: 2022-12-09
基金项目:河南省重大科技专项(221100240500);河南省科技攻关项目(222102220089)
作者简介:刘 普(1984—),男,博士,讲师,研究方向为可再生能源并网发电技术、柔性直流输电技术;
崔艺博(1998—),男,硕士研究生,研究方向为永磁同步电机模型预测控制;
王 聪(1999—),女,硕士研究生,研究方向为可再生能源并网发电技术;
韩 坤(1983—),男,硕士,高级工程师,研究方向为柔性直流输电系统分析与控制;
常忠廷(1977—),男,硕士,高级工程师,研究方向为高电压试验技术。
通信作者:崔艺博
SPMSM fast start control strategy based on dual MPC and dynamic slope I/f
LIU Pu1, CUI Yibo1, WANG Cong1, HAN Kun2, CHANG Zhongting2
(1.School of Electrical and Information Engineering, Zhengzhou University of Light Industry, Zhengzhou 450002, China; 2.XJ Electric Co., Ltd., Xuchang 461000, China)
Abstract:
In order to realize the fast start-up of surface permanent magnet synchronous motor (SPMSM), a dynamic slope I/f (DI/f) start-up control strategy for SPMSM was proposed, in which both the inner and outer loops adopt the model predictive control (MPC) strategy, in order to solve the problems of slow start-up caused by the fixed reference slope of the existing I/f start-up and insufficient dynamic response capability of the subsequent switching to the double PI closed-loop field oriented control (FOC) strategy. First, the rotor position and speed at the next moment were calculated by model prediction. The speed was used to estimate the load torque, and the rotor position is equivalent to the dynamic reference frequency in the variable slope I/f start-up, which constitutes the variable DI/f start-up. When the motor speed reaches the set speed, the system automatically switches to the double closed-loop MPC control. The model predictive speed outer loop calculates the rated value of the q-axis current at the next moment through the current speed and the estimated load, so as to achieve a smooth and fast switch from start-up to steady state. The simulation and experimental results verify feasibility and effectiveness of the algorithm, and shorten the starting rise time of the permanent magnet synchronous motor by 41.9% and the setting time by 41.1%.
Keywords:permanent magnet synchronous motor; I/f control; field oriented control; model predictive control; compound control; dynamic response
0 引 言
表贴式永磁同步电动机(surface permanent magnet synchronous motor,SPMSM)因具有结构简单、效率高、调速范围广等优点,被广泛应用于机床、电动汽车、混合动力电动汽车、飞机和船舶推进系统。在轨道电车牵引、电力船舶推进和紧急排烟排热等场合需要SPMSM有良好的调速性能和快速启动能力,因此通过改善控制方法来提升电机的动态响应和启动能力得到了广泛研究[1-4]。
现有永磁同步电动机(permanent magnet synchronous motor,PMSM)控制方法有恒压频比控制(V/f)、恒流频比控制(I/f)、直接转矩控制(direct torque control,DTC)、磁场导向控制(field oriented control,FOC)等。传统V/f控制本质上是电流开环控制,在切换到双闭环矢量控制之前,如果电压频率比选择不当,可能会导致转矩纹波或过流[5]。与V/f控制相比,I/f控制通过转矩和功率角之间的自稳定来实现SPMSM的稳定启动,通过调节电流可以有效地防止电流过流,具有一定的抗干扰能力。但I/f控制方法同样是一种开环控制,电流幅值和频率不能自动调节,且存在易失步、转速易受干扰等缺点,不适合电机稳态运行,只用于辅助启动[6]。传统DTC使用2个滞后比较器和1个简单的最佳开关表,通过对应的电压矢量来控制电机[7]。该方法转矩和磁通波动大、开关频率不固定、噪声大。FOC采用比例积分环的级联结构,内环控制器调节旋转坐标系中的电流,外环控制器通过为内环提供q轴参考电流来调节速度。基于反馈控制的PI控制器限制了电机的动态调节特性[8-9]。
在电机启动阶段使用I/f控制,启动过程中参考频率的最大上升速率对应最短的启动时间。文献[10-11]参考频率随时间升高,频率上升速率是根据特定负载扭矩任意选择的,缺少理论设计依据。文献[12]SPMSM控制的稳定性很大程度上取决于频率参考曲线的选择,而频率参考曲线采用试错法建立。文献[13]假设最终转子速度不取决于瞬时扭矩,而是取决于有效平均扭矩,导出选择频率斜坡率的解析表达式。文献[14]讨论通过调节扭矩角来改善I/f控制的电流利用率。但是参考频率斜率保持在最小值,牺牲了电机的动态性能。文献[15]通过将频率斜率限制在一个较小的值来防止电机失控,但对于较大的最大负载扭矩值,其斜坡上升区域的表达式趋于无穷大。文献[16]提出闭环I/f控制,以提高定子电流利用率,但是没有讨论电机在转速上升期间的动态性能。文献[17]提出闭环I/f控制,其中转矩角保持在90°。根据系统中存在的转动惯量和负载转矩动态改变频率斜率,但为保证系统稳定运行,参考频率斜率选择最小值。以上的方法均不同程度牺牲了电机的动态响应特性,不适用于快速启动应用场合。
传统I/f控制在电机达到稳态后容易产生转速波动,启动完成后投切为FOC控制。当前主流FOC控制策略的算法采用双闭环PI控制器,但该方法动态响应能力有时难以满足预期[18-19]。基于被控对象数学模型的模型预测控制(model predictive control,MPC)直接计算出达到给定电流值所需的电压值,可以实现理论上最快的动态响应。文献[20]提出一种三矢量模型预测电流控制,以提高系统动态响应能力。文献[21]提出一种PMSM多步模型预测电流控制策略,该策略一定条件下避免遍历备选电压矢量以简化运算。但以上文献只对电流内环进行改进,对系统动态响应能力影响更大的转速外环均采用PI控制器。文献[22]的驱动系统由速度预测控制器控制,表现出对转速变化的高动态响应。然而,机械时间常数和电气时间常数之间的巨大差异需要较长的预测范围才能实施该策略。文献[23]将预测函数控制法引入到速度环的控制设计中,但转速指令通过一阶低通滤波后相当于非阶跃信号,影响动态响应能力的提升,同时设计过程没有考虑负载转矩的影响。
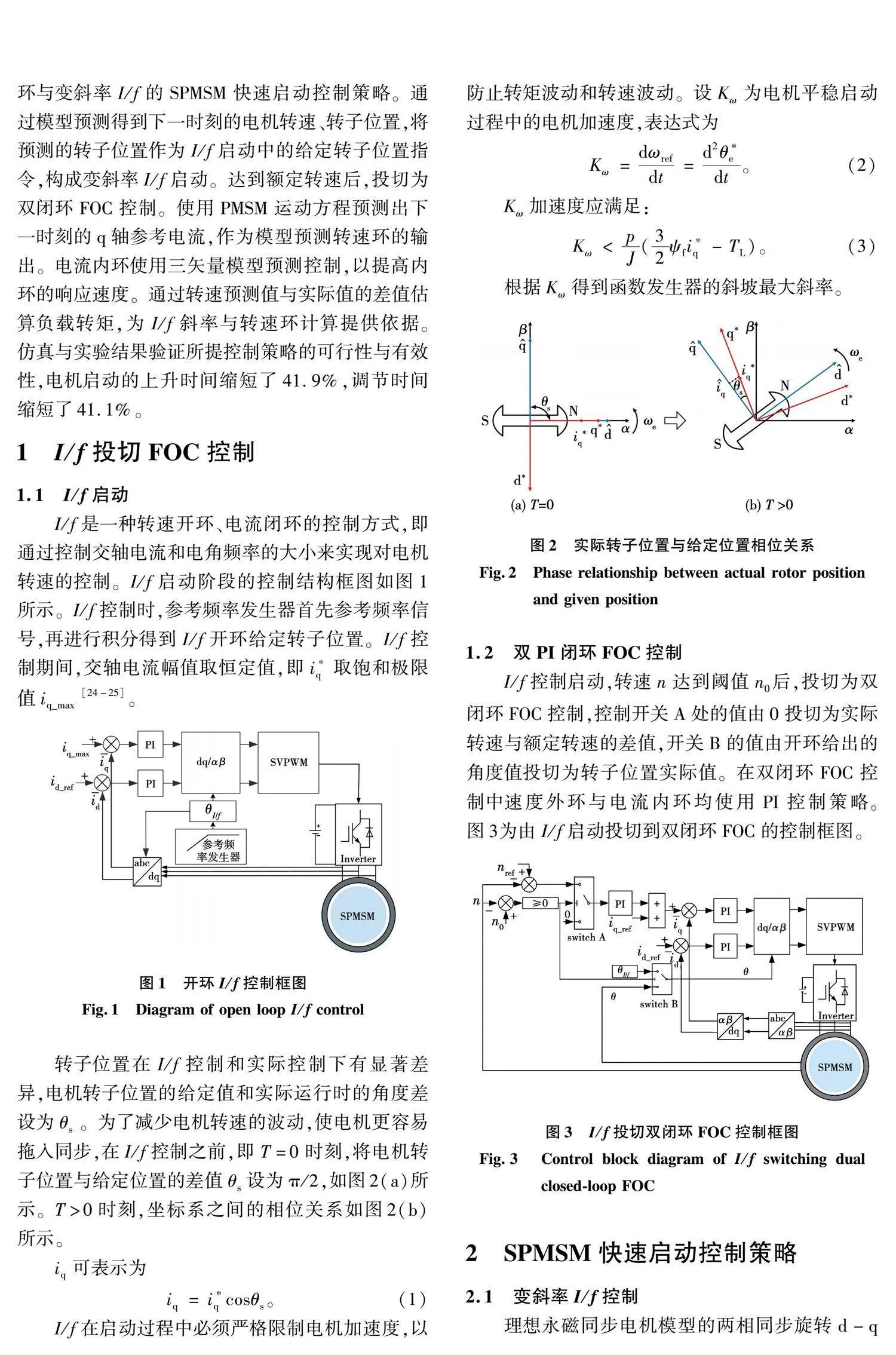
针对上述问题,本文提出一种基于双MPC控制环与变斜率I/f的SPMSM快速启动控制策略。通过模型预测得到下一时刻的电机转速、转子位置,将预测的转子位置作为I/f启动中的给定转子位置指令,构成变斜率I/f启动。达到额定转速后,投切为双闭环FOC控制。使用PMSM运动方程预测出下一时刻的q轴参考电流,作为模型预测转速环的输出。电流内环使用三矢量模型预测控制,以提高内环的响应速度。通过转速预测值与实际值的差值估算负载转矩,为I/f斜率与转速环计算提供依据。仿真与实验结果验证所提控制策略的可行性与有效性,电机启动的上升时间缩短了41.9%,调节时间缩短了41.1%。
1 I/f投切FOC控制
1.1 I/f启动
I/f是一种转速开环、电流闭环的控制方式,即通过控制交轴电流和电角频率的大小来实现对电机转速的控制。I/f启动阶段的控制结构框图如图1所示。I/f控制时,参考频率发生器首先参考频率信号,再进行积分得到I/f开环给定转子位置。I/f控制期间,交轴电流幅值取恒定值,即i*q取饱和极限值iq_max[24-25]。
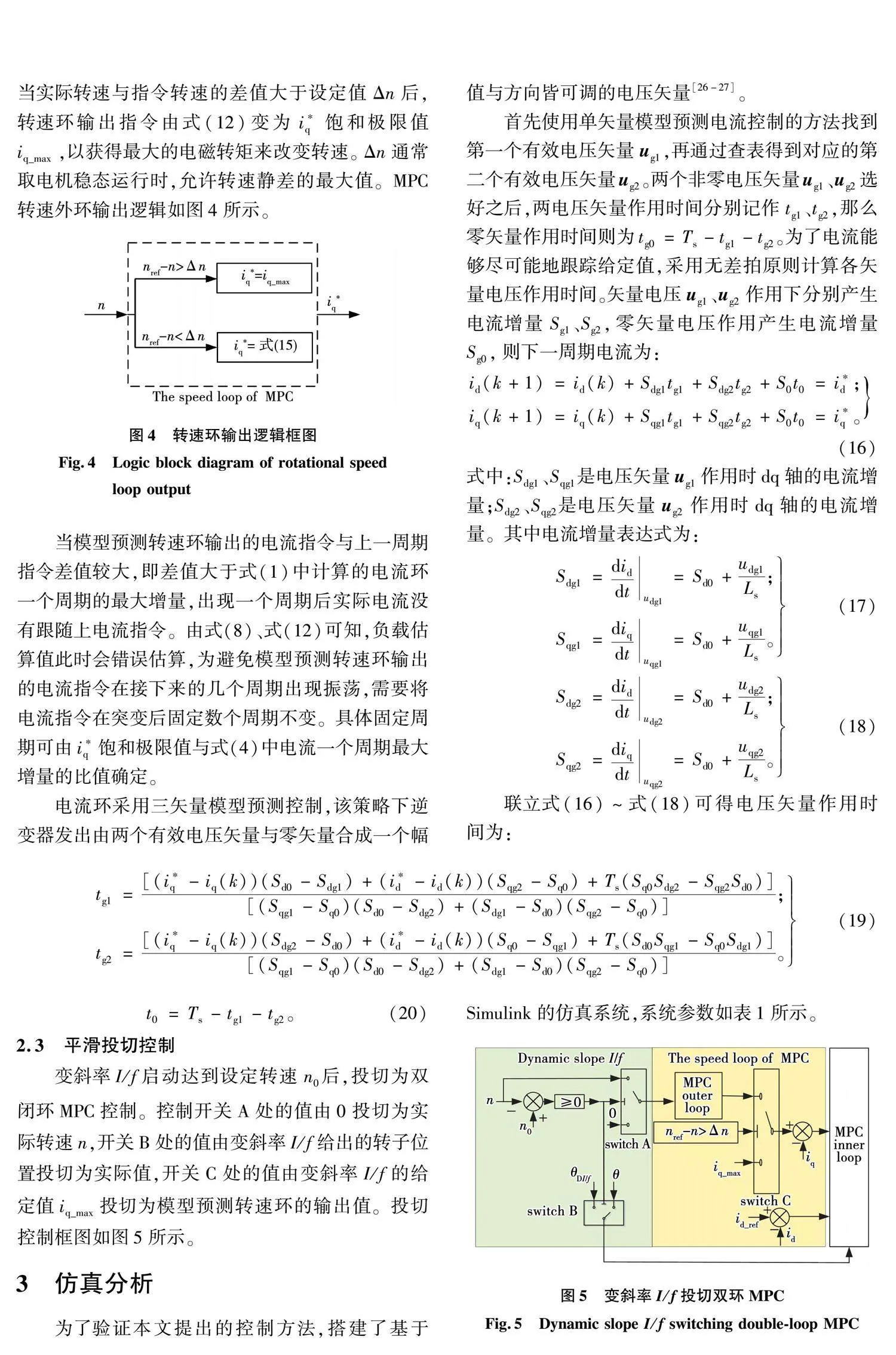
2.3 平滑投切控制
变斜率I/f启动达到设定转速n0后,投切为双闭环MPC控制。控制开关A处的值由0投切为实际转速n,开关B处的值由变斜率I/f给出的转子位置投切为实际值,开关C处的值由变斜率I/f的给定值iq_max投切为模型预测转速环的输出值。投切控制框图如图5所示。
3 仿真分析
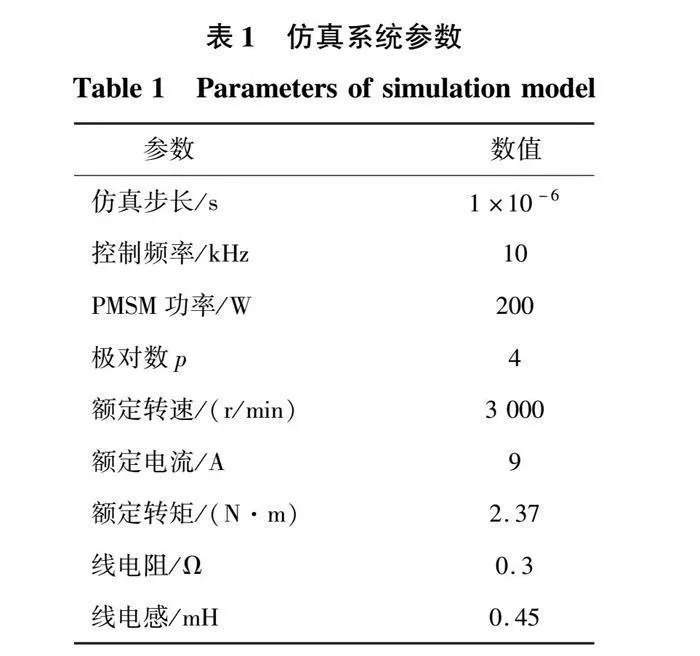
为了验证本文提出的控制方法,搭建了基于Simulink的仿真系统,系统参数如表1所示。
3.1 两种I/f启动的对比
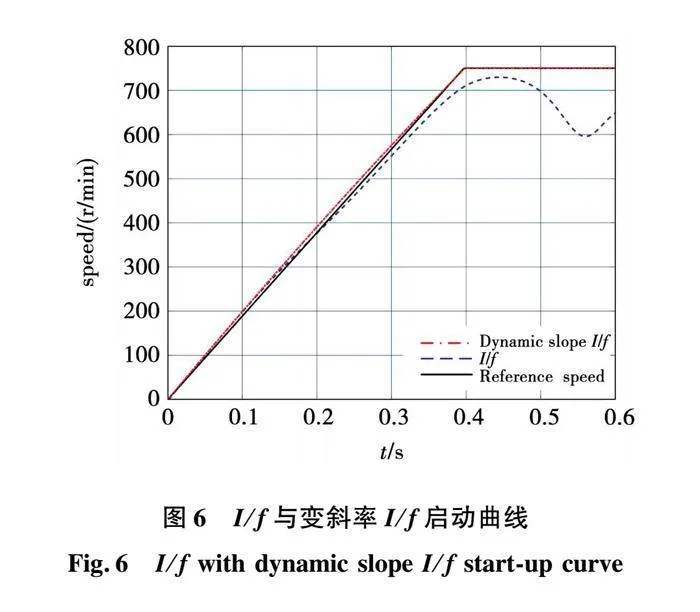
图6为使用传统I/f启动与变斜率I/f启动转速从0升至750 r/min的曲线对比,传统I/f启动的参考频率斜率使用允许的最大值(Reference speed),可以看出变斜率I/f的启动时间更短。传统I/f启动过程中因为功角自平衡原理,转速上升速率存在波动。
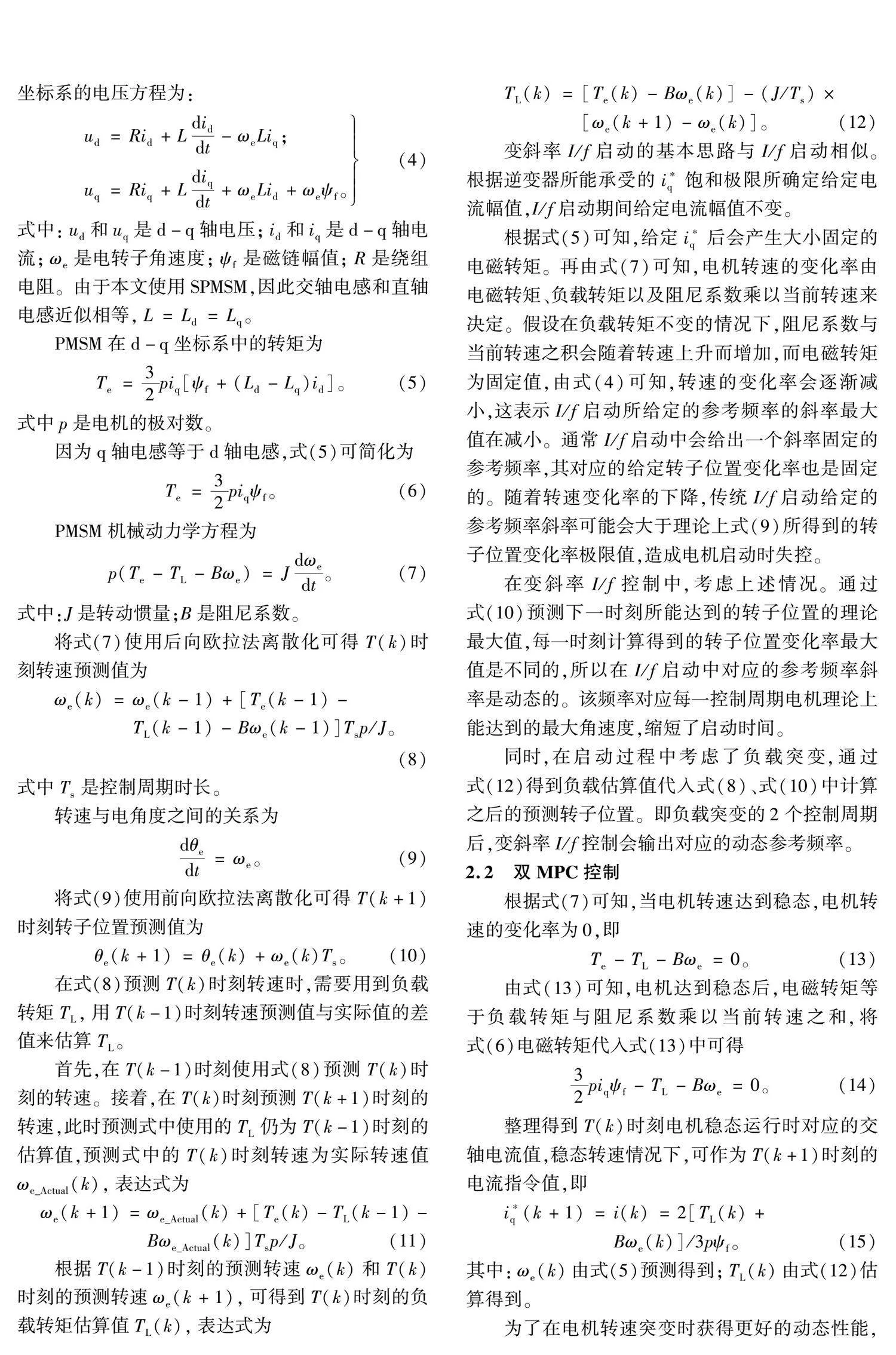
图7为将传统I/f启动的启动时间缩短后,使用传统I/f启动与变斜率I/f启动的转速曲线对比。传统I/f启动达到高转速后,固定上升频率大于理论下转速变化率的最大值而导致电机失控。而变斜率I/f启动过程中的转速变化率对应每一时刻的理论最大值,缩短了启动时间。
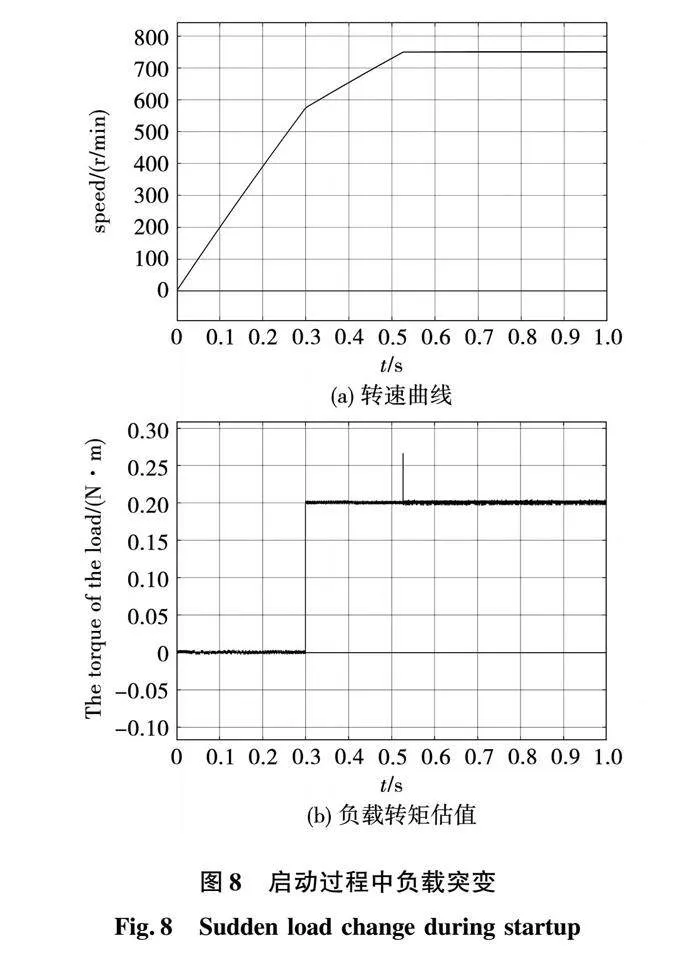
图8(a)为变斜率I/f启动过程中,负载转矩突变的转速曲线,图8(b)为负载转矩估算值。0.3 s时,负载转矩突变为0.2 N·m,转速上升斜率对应减小,电机平稳启动。
3.2 FOC控制策略对比
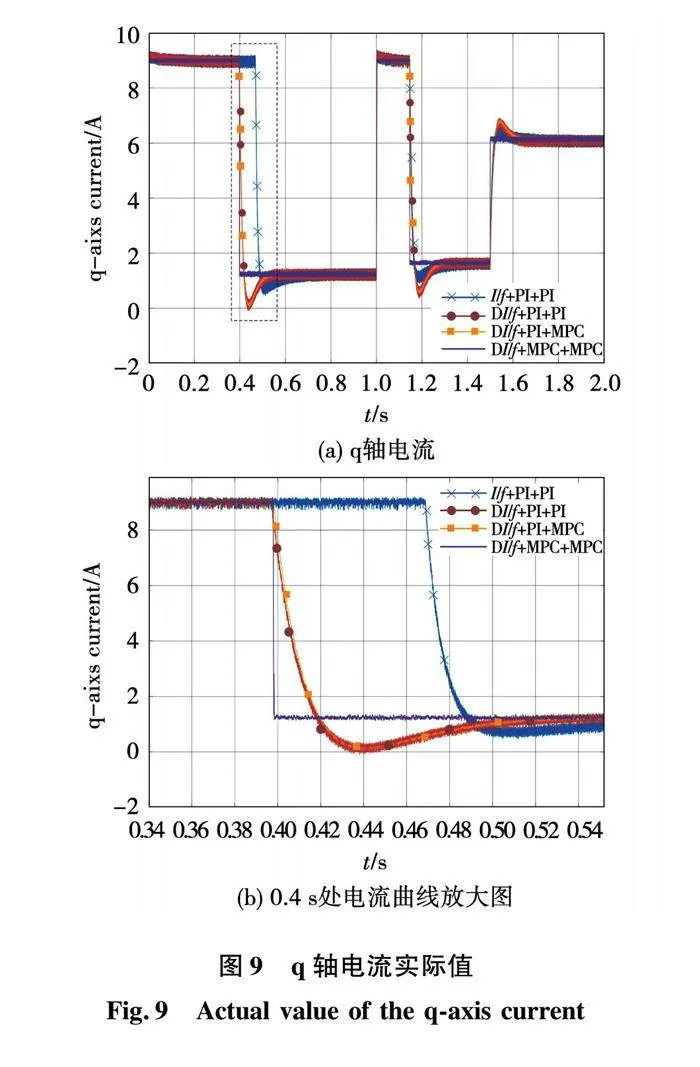
图9(a)为分别使用传统I/f启动后投切到双环PI控制(I/f+PI+PI)、变斜率I/f启动后投切PI双环控制(DI/f+PI+PI)、PI转速环MPC电流环控制(DI/f+PI+MPC)、MPC双环(DI/f+MPC+MPC)控制的q轴电流实际值对比曲线。0 s开始电机加速,q轴电流维持最大值,0.4 s转速接近给定值,q轴电流降为维持750 r/min转速所需要的电流值。图9(b)为0.4 s左右q轴电流曲线的放大图。使用PI转速环的3种控制策略在数百个控制周期后实际电流值接近稳态值,而DI/f+MPC+MPC控制策略下的电流值在几个控制周期后达到了稳态。工况突变后,MPC转速环会在一个控制周期后输出对应的稳态电流值指令,三矢量模型预测电流环在几个周期后跟上电流指令,实现了尽可能快的动态响应。
1 s时,电机转速指令突变为1 000 r/min,q轴电流升高使电机加速,1.15 s转速接近1 000 r/min,q轴电流下降。1.5 s时负载转矩突变为0.2 N·m,q轴电流降为维持在该条件下所需要的电流值。
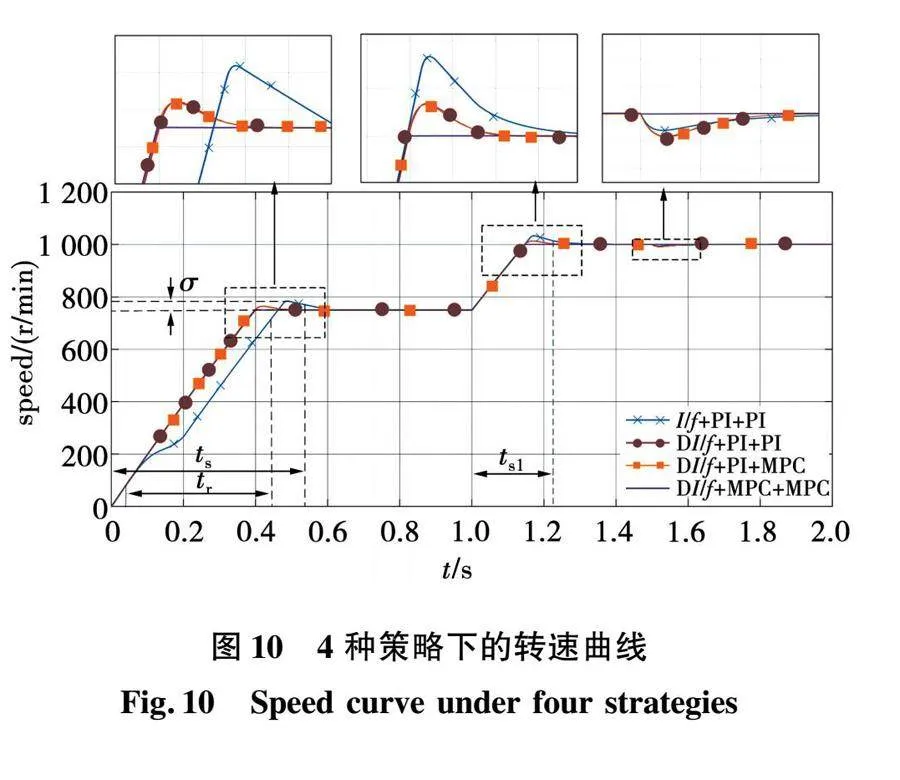
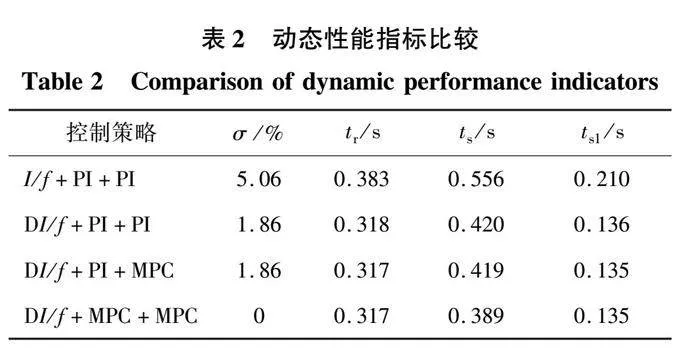
图10为使用4种算法控制时,复合控制系统的转速响应曲线对比图,工况与图9 q轴电流实际值对应工况相同。3种算法的动态性能指标比较结果如表2所示。其中:σ表示超调量;tr表示上升时间;ts(Δ=0.02)表示调节时间;ts1(Δ=0.02)表示转速突变后的调节时间。
使用传统I/f启动后,投切PI双环控制的转速曲线上升时间明显大于使用变斜率I/f启动的另外3种策略。在变斜率启动后,投切为PI双环控制,电机转速从0上升到750 r/min,转速有明显超调。投切为PI外环MPC内环时,产生的超调量低于双环PI,说明MPC电流环小幅度地改善了控制系统的动态性能。投切为双环MPC策略时,达到稳态转速的时间短于前3种控制策略,上升时间相较于I/f+PI+PI策略缩短了17.2%,调节时间ts缩短了30.0%。
在t=1 s时给定转速突变为1 000 r/min,使用PI外环控制的2种策略对应的转速曲线到达新给定转速后,均产生转速超调,其中使用MPC内环控制对应转速超调量较小,使用MPC双环控制对应转速曲线无超调且更快达到稳态,MPC双环控制策略的动态响应性能更好。在t=1.5 s时给定负载转矩突变为0.2 N·m,使用MPC双环控制对应转速曲线更快达到稳态,转速几乎无波动。可以看出,MPC双环控制策略具有更好的动态性能。
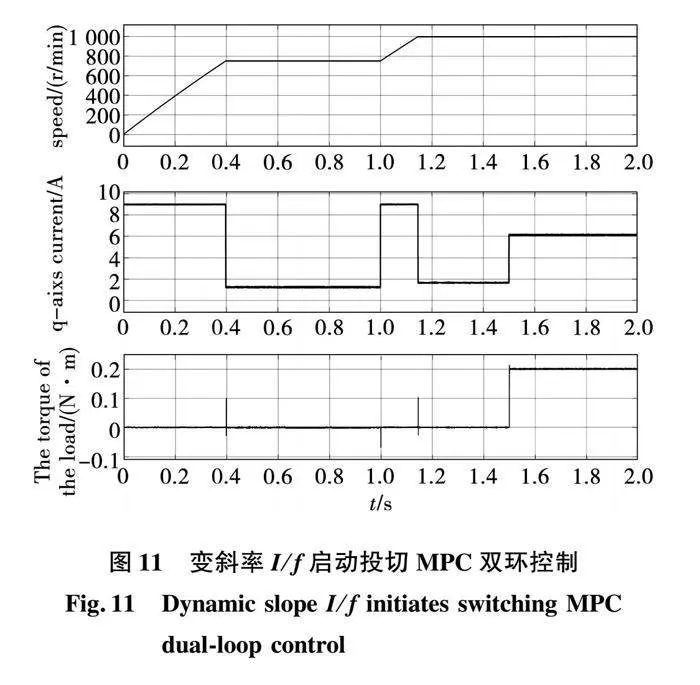
图11为使用变斜率I/f启动后投切MPC双环控制的转速曲线、电流曲线和负载转矩曲线。电机转速从0上升到750 r/min,在t=1 s时给定转速突变为1 000 r/min,t=1.5 s时给定负载转矩突变为0.2 N·m。根据工况的改变,对应的q轴电流实际值与负载转矩估测值均在几个控制周期内做出了变化,整个控制策略实现了快速动态响应(在系统物理和控制约束允许的情况下尽可能快)和可接受的稳态性能。
4 实验分析
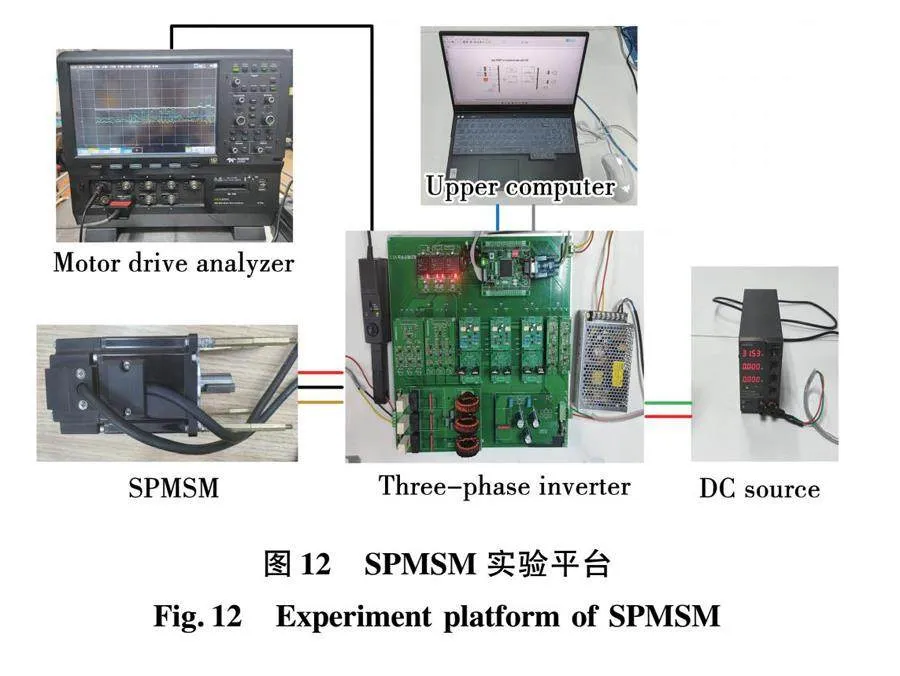
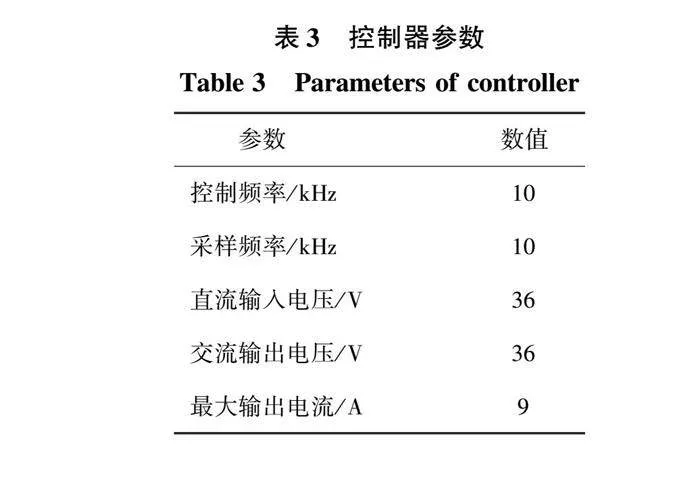
为进一步验证算法的有效性搭建了永磁同步电机实验平台如图12所示。系统的控制器采用TI公司TMS320F28335型DSP芯片,控制频率采用10 kHz,直流母线电压为36 V,AD采样频率为10 kHz。控制器参数如表3所示。
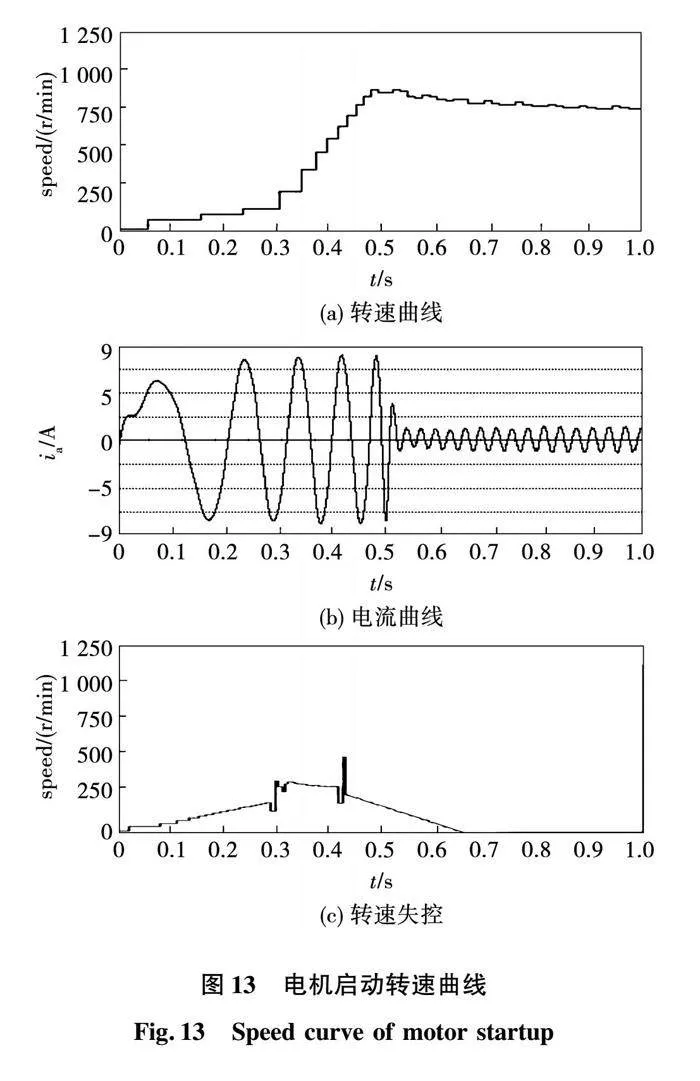
电机从0 r/min启动,转速达到阈值转速n0(200 r/min)后,由I/f控制投切为双闭环PI控制(I/f+PI+PI),转速上升至750 r/min稳定运行。图13(a)为电机启动转速曲线,可以看出,电机在参考频率上升速率最大后的I/f启动转速曲线,投切到双闭环PI控制后电机转速迅速上升,但出现超调。图13(b)为定子相电流,图13(c)为I/f启动过程中使用更大的参考频率上升速率后,电机失控的转速曲线。
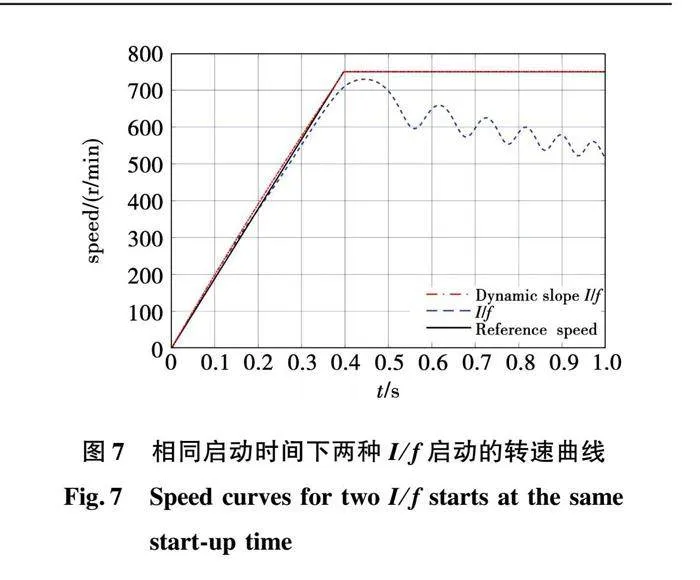
使用变斜率I/f启动,投切到双环PI控制(I/f+PI+PI)。图14(a)为电机启动转速曲线,电机启动时间缩短,投切到双闭环PI控制后,转速出现超调。图14(b)为对应的定子相电流。
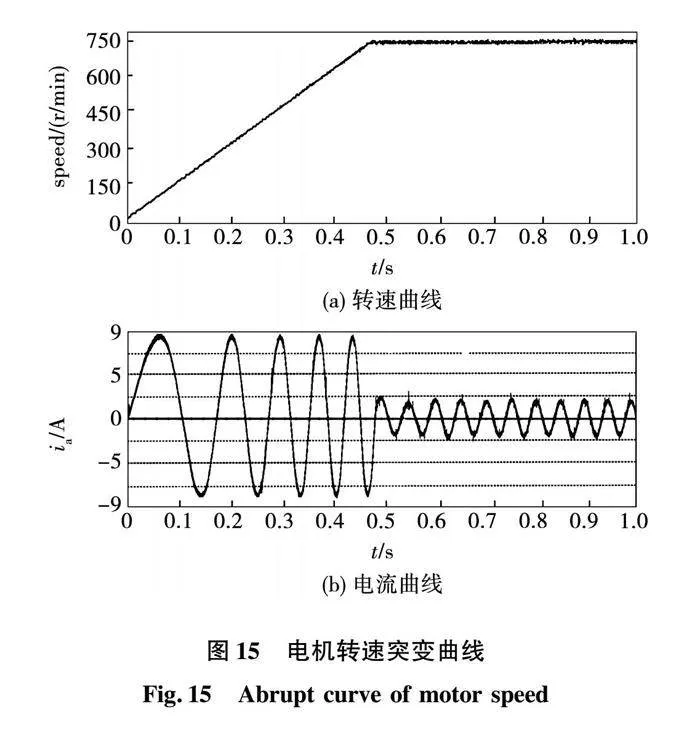
使用变斜率I/f启动,投切到双环MPC控制(I/f+MPC+MPC)。图15(a)为电机启动转速曲线,电机启动时间同传统I/f启动相比缩短,投切到双闭环MPC控制后,转速无超调。图15(b)为对应的定子相电流。
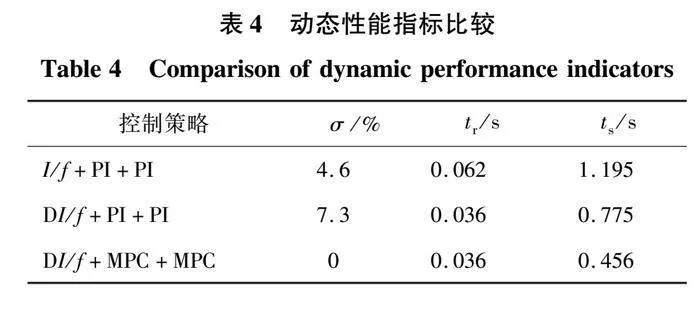
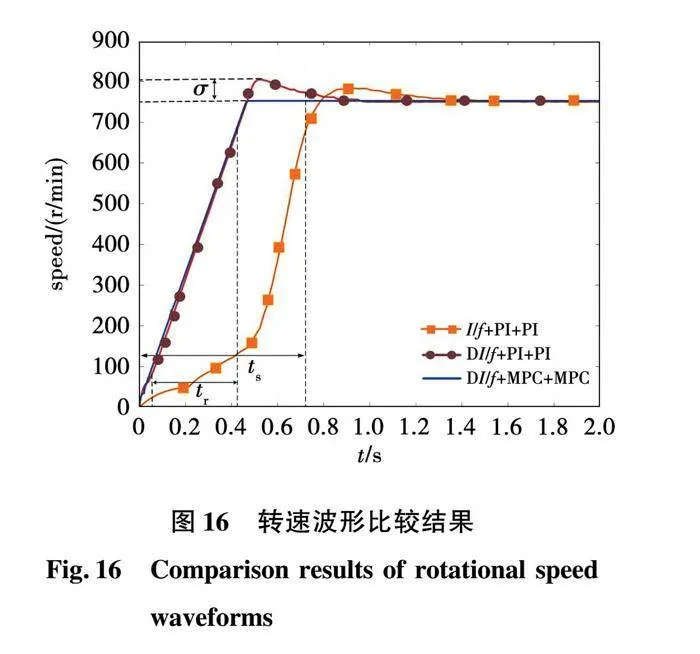
图16为使用3种算法控制时,复合控制系统的转速响应曲线对比图。3种算法的动态性能指标比较结果如表4所示,其中:σ表示超调量;tr表示上升时间;ts(Δ=0.02)表示调节时间。
使用传统I/f启动,电机转速从0上升到给定转速750 r/min,调节时间ts为0.062 s,超调量σ为4.6%。使用变斜率I/f启动投切双PI控制,超调量为7.3%,上升时间tr相较于传统I/f启动缩短了41.9%,调节时间ts缩短了35.1%。使用变斜率I/f启动投切双MPC,调节时间为0.036 s,超调量为0,上升时间相较于传统I/f启动,上升时间缩短了41.9%,调节时间ts缩短了41.1%。因此,实验结果与仿真结果基本一致。
5 结 论
本文提出一种内、外环均采用MPC的SPMSM变斜率I/f启动控制策略。通过变斜率I/f控制使电机启动,期间根据负载估算值动态调整给定参考频率的斜率为最大值,以提升系统的启动速度。达到给定转速后,投切为双闭环MPC控制。提出的MPC转速环通过当前时刻转速与估算负载转矩计算下一控制周期q轴电流的额定值,提高了系统的动态响应能力。仿真与实验结果验证了所提出的快速启动控制方案的可行性和有效性。
参 考 文 献:
[1] NAIR S V, HATUA K, PRASAD N V P R D, et al. Quick and seamless transition method for I-f to sensorless vector control changeover and on-the-fly start of PMSM drives[J]. IET Electric Power Applications, 2020, 14(11): 2231.
[2] FUENTES E, SILVA C A, KENNEL R M. MPC implementation of a quasi-time-optimal speed control for a PMSM drive, with inner modulated-FS-MPC torque control[J]. IEEE Transactions on Industrial Electronics, 2016, 63(6): 3897.
[3] 孙欣,肖曦,韩继文,等.基于机械参数辨识的永磁同步电机驱动系统速度环自调试方法[J]. 电机与控制学报, 2022,26(12): 1.
SUN Xin, XIAO Xi, HAN Jiwen, et al. Speed loop self-commissioning for permanent magnet synchronous motor drives based on mechanical parameter identification[J]. Electric Machines and Control, 2022,26(12): 1.
[4] NAIR S V, HATUA K, PRASAD N V P R D, et al. A quick I-f starting of PMSM drive with pole slipping prevention and reduced speed oscillations[J]. IEEE Transactions on Industrial Electronics, 2020, 68(8): 6650.
[5] 李洪亮, 姜建国, 周中正. 异步电机V/F控制系统起动和某频段振荡问题[J]. 电机与控制学报, 2017, 21(1): 90.
LI Hongliang, JIANG Jianguo, ZHOU Zhongzheng. V/F control method of induction motor’s starting and oscillation in a certain frequency band [J].Electric Machines and Control,2017,21(1):90.
[6] 宋桂英, 李佳伦.I/f结合改进滑模观测器的PMSM无传感器复合控制[J]. 电机与控制学报, 2020, 24(11): 63.
SONG Guiying, LI jialun. Sensorless control for PMSM with combined I/f and improved sliding mode observer[J]. Electric Machines and Control, 2020, 24(11): 63.
[7] WANG W H, XI X. Research on predictive control for PMSM based on online parameter identification[C]//IECON 2012-38th Annual Conference on IEEE Industrial Electronics Society, October 25-28, 2012, Quebec, Canada. 2012: 1982-1986.
[8] CHAI S, WANG L, ROGERS E. A cascade MPC control structure for a PMSM with speed ripple minimization[J]. IEEE Transactions on Industrial Electronics, 2012, 60(8): 2978.
[9] 张永昌, 杨海涛, 魏香龙. 基于快速矢量选择的永磁同步电机模型预测控制[J]. 电工技术学报, 2016, 31(6): 66.
ZHANG Yongchang, YANG Haitao, WEI Xianglong. Model predictive control of permanent magnet synchronous motors based on fast vector selection[J]. Transactions of China Electrotechnical Society, 2016, 31(6): 66.
[10] WANG M Z. A simple startup strategy based on current regulation for back-EMF-based sensorless control of PMSM[J]. IEEE Transactions on Power Electronics, 2012, 27(8): 3817.
[11] YU Y, CHANG D, ZHENG X, et al. A stator current oriented closed-loop I-f control of sensorless SPMSM with fully unknown parameters for reverse rotation prevention[J]. IEEE Transactions on Power Electronics, 2018, 33(10): 8607.
[12] SONG X D, FANG J C, HAN B C, et al. Adaptive compensation method for high-speed surface PMSM sensorless drives of EMF-based position estimation error[J]. IEEE Transactions on Power Electronics, 2016, 31(2): 1438.
[13] BORISAVLJEVIC A, POLINDER H, FERREIRA J A. Realization of the I/f control method for a high-speed permanent magnet motor[C]// The XIX International Conference on Electrical Machines-ICEM 2010, September 6-8,2010,Rome, Italy. 2010: 1-6.
[14] 王大方, 刘智祺, 金毅, 等. 基于反电动势积分法的无位置传感器直流无刷电机试探性起动研究[J]. 电工技术学报, 2012, 27(12): 178.
WANG Dafang, LIU Zhiqi, JIN Yi, et al. Tentative strategy of starting sensorless BLDCM with the method of integrating the back EMF[J]. Transactions of China Electrotechnical Society, 2012, 27(12): 178.
[15] BARATIERI C L, PINHEIRO H. An I-f starting method for smooth and fast transition to sensorless control of BLDC motors[C]//2013 Brazilian Power Electronics Conference, November 7-10, 2013, Joao Pessoa, Brazil. 2013: 836-843.
[16] YANG J, HUANG W, CAO R, et al. A closed-loop I/f sensorless control based on current vector orientation for permanent magnet synchronous motors[C]//2015 18th International Conference on Electrical Machines and Systems (ICEMS), October 25-28, 2015, Pattaya, Thailand. 2015: 1609-1614.
[17] NAIR S V, HATUA K, PRASAD N D, et al. A quick I-f starting of PMSM drive with pole slipping prevention and reduced speed oscillations[J]. IEEE Transactions on Industrial Electronics, 2020, 68(8): 6650.
[18] JUSTAS D, VOITECH S, KRZYSZTOF . Implementation of extended Kalman filter with optimized execution time for sensorless control of a PMSM using ARM cortex-M3 microcontroller[J].Energies, 2021, 14(12): 3491.
[19] VAFAIE M H, DEHKORDI B M, MOALLEM P, et al. A new predictive direct torque control method for improving both steady-state and transient-state operations of the PMSM[J]. IEEE Transactions on Power Electronics, 2015, 31(5): 3738.
[20] 徐艳平, 王极兵, 张保程, 等. 永磁同步电机三矢量模型预测电流控制[J]. 电工技术学报, 2018, 33(5): 980.
XU Yanping, WANG Jibing, ZHANG Baocheng,et al. Three-vector-based model predictive current control for permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2018, 33(5): 980.
[21] 李耀华, 苏锦仕, 秦辉, 等. 表贴式永磁同步电机多步预测控制简化算法[J]. 电机与控制学报, 2022, 26(11): 122.
LI Yaohua, SU Jinshi, QIN Hui, et al. Simplified multi-step predictive control for surface permanent magnet synchronous motor[J]. Electric Machines and Control, 2022, 26(11): 122.
[22] PREINDL M, BOLOGNANI S. Model predictive direct speed control with finite control set of PMSM drive systems[J]. IEEE Transactions on Power Electronics, 2012, 28(2): 1007.
[23] PAN H, HUANG X, GUAN P, et al. Grey-prediction-based double model predictive control strategy for the speed and current control of permanent magnet synchronous motor[J]. Asian Journal of Control, 2022, 24(6): 3494.
[24] LIU P, LIU D, SHEN Y, et al. Full speed range position-sensorless compound control scheme for PMSMs[J]. Journal of Power Electronics, 2022, 22(8): 1302.
[25] NICOLA M, NICOLA C I, DU M. Sensorless control of PMSM using FOC strategy based on LADRC speed controller[C]//2020 12th International Electronics,Computers and Artificial Intelligence (ECAI),July 25-27, 2020, Bucharest, Romania. 2020: 1-10.
[26] ZHANG Q, YI Y, LIU P. Robust model predictive current control without dead-zone compensation[J]. IET Electric Power Applications, 2020, 14(11): 2193.
[27] 葛兴来, 胡晓, 孙伟鑫,等. 永磁同步电机三矢量优化预测磁链控制[J]. 电机与控制学报, 2021, 25(8): 9.
GE Xinglai, HU Xiao, SUN Weixin, et al. Three vectors model predictive flux-linkage control of permanent magnet synchronous motor[J]. Electric Machines and Control, 2021, 25(8): 9.
(编辑:邱赫男)
