吊篮式自走移栽机的设计
2024-11-05张贵明巢淑娟燕亚民


摘要 为保证丘陵地区秧苗实时移栽,提高移栽质量,阐述一种吊篮式自走移栽机行走装置和移栽机构的结构及工作原理。通过分析计算及1∶1的建模,验证行走装置的工作速度和结构布局形式,以及移栽机构各动作的协调性及栽苗质量。根据建模分析的结果,确定设计的主要参数,从而设计出行走机构装置主要部件轮架机构、主驱动变速箱机构、机架、升降机构、水平调节机构及控制装置等,移栽机构主要部件移栽变速箱机构、株距调节机构、曲柄连杆机构、鸭嘴移栽器、自动喂料机构等。通过样机试制和试验,结果表明:该机具可完成移栽株距(260~600 mm)、移栽深度(80~160 mm)可调的目标,工作效率高,同时具有结构合理紧凑、维护方便、操作简单等优点。
关键词 吊篮;移栽机;曲柄多连杆机构;水平调节机构;鸭嘴
中图分类号 S 223 文献标识码 A 文章编号 0517-6611(2024)20-0186-04
doi:10.3969/j.issn.0517-6611.2024.20.045
开放科学(资源服务)标识码(OSID):
Design of a Hanging Basket Type Self-propelled Transplanter
ZHANG Gui-ming, CHAO Shu-juan, YAN Ya-min
(Xuchang Vocational Technical College, Xuchang, Henan 461000)
Abstract To ensure real-time transplanting of seedlings in hilly areas and improve the quality of transplanting, this paper elaborates on the working principle and structure of a basket type self-propelled transplanting machine’s walking device and transplanting mechanism. Verify the working speed and structural layout of the walking device through analysis, calculation, and 1:1 modeling, and verify the coordination of various actions of the transplanting mechanism and the quality of the seedlings. Based on the results of modeling analysis, the main parameters of the design are determined, and the main components of the walking mechanism device—wheel frame mechanism, main drive gearbox mechanism, frame, lifting mechanism, horizontal adjustment mechanism and control device are designed. The main components of the transplanting mechanism—transplanting gearbox mechanism, plant spacing adjustment mechanism, crank connecting rod mechanism, duckbill transplanting device, automatic feeding mechanism, etc. are designed. Through prototype trial production and experiments, this machine can achieve the goals of adjustable transplanting spacing (260-600 mm), transplanting depth (80-160 mm), and high efficiency. At the same time, it has the advantages of reasonable and compact structure, convenient maintenance and simple operation.
Key words Hanging basket;Transplanter;Crank multi-link mechanism;Horizontal adjustment mechanism;Duckbill
移栽是指把在大棚中集中育好的秧苗根据时节适时栽植到大田中[1]。丘陵地区灌溉条件差,在无雨季节易干旱,不利于播种及秧苗生长。过去人们只有等着雨季的到来才能播种,但往往会错过作物的最佳播种时期,造成作物产量降低。如果采用秧苗移栽,这个时期可以在大棚中采用工厂化育苗的方式集中育苗,等雨季到来时就可以在田间大面积移栽,缩短秧苗在田间的生长时间,充分利用雨季来促进秧苗的生长,提高农作物的产量和质量[2]。为了提高丘陵地区秧苗移栽效率,抓住雨后墒情及时移栽,提高移栽质量,实现移栽机械化,笔者在收集、总结、吸收国内外各种移栽机的结构及优点的基础上,结合我国现代种植农艺要求和不同种植区域的特点[3],通过综合分析和计算,仿真建模和试验,成功地开发、设计出了满足丘陵地区斜坡地、小块地使用的吊篮式自走移栽机[4]。该机具可一次性完成秧苗预装、垄打孔、秧苗移栽、覆土镇压等多道工序,适合于多种小角度倾斜地形和多种类型不同株距作物的移栽[5]。
1 整机结构设计与工作原理
1.1 基本结构
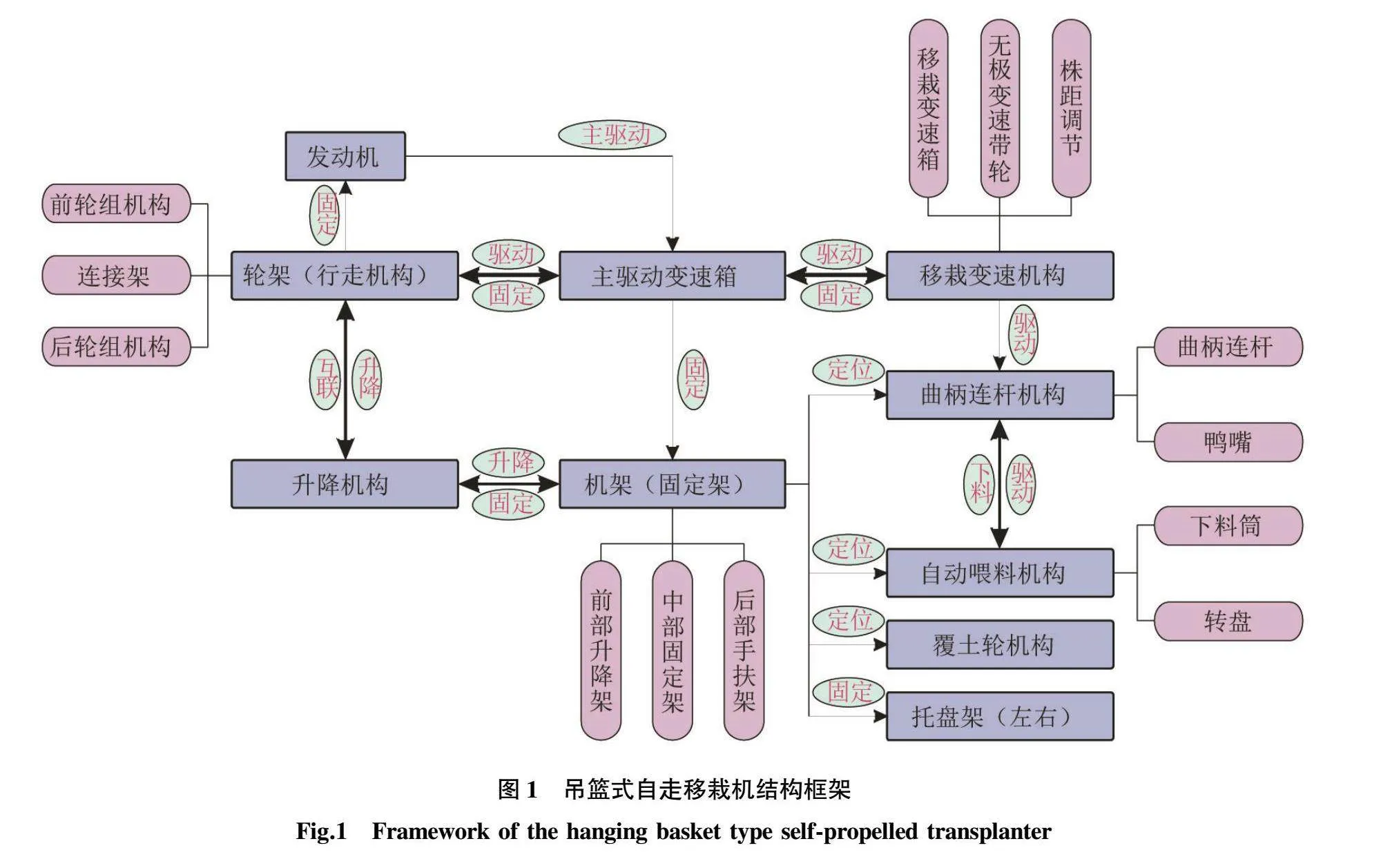
吊篮式自走移栽机采用模块化设计,按功能划分为行走机构系统和移栽机构系统两大部分[6],其机构框架如图1所示。行走机构系统主要由发动机、轮架(行走机构)、前轮组机构、连接架、后轮组机构、主驱动变速箱机构、机架(固定架)、升降机构、前部升降架、中部固定架、后部手扶架等装置组成;移栽机构系统主要由移栽变速机构(移栽变速箱、无级变速带轮、株距调节)、曲柄连杆机构(曲柄连杆、鸭嘴)、转盘式自动喂料机构(下料筒、转盘)、托盘架和覆土轮机构等装置组成[7-9]。
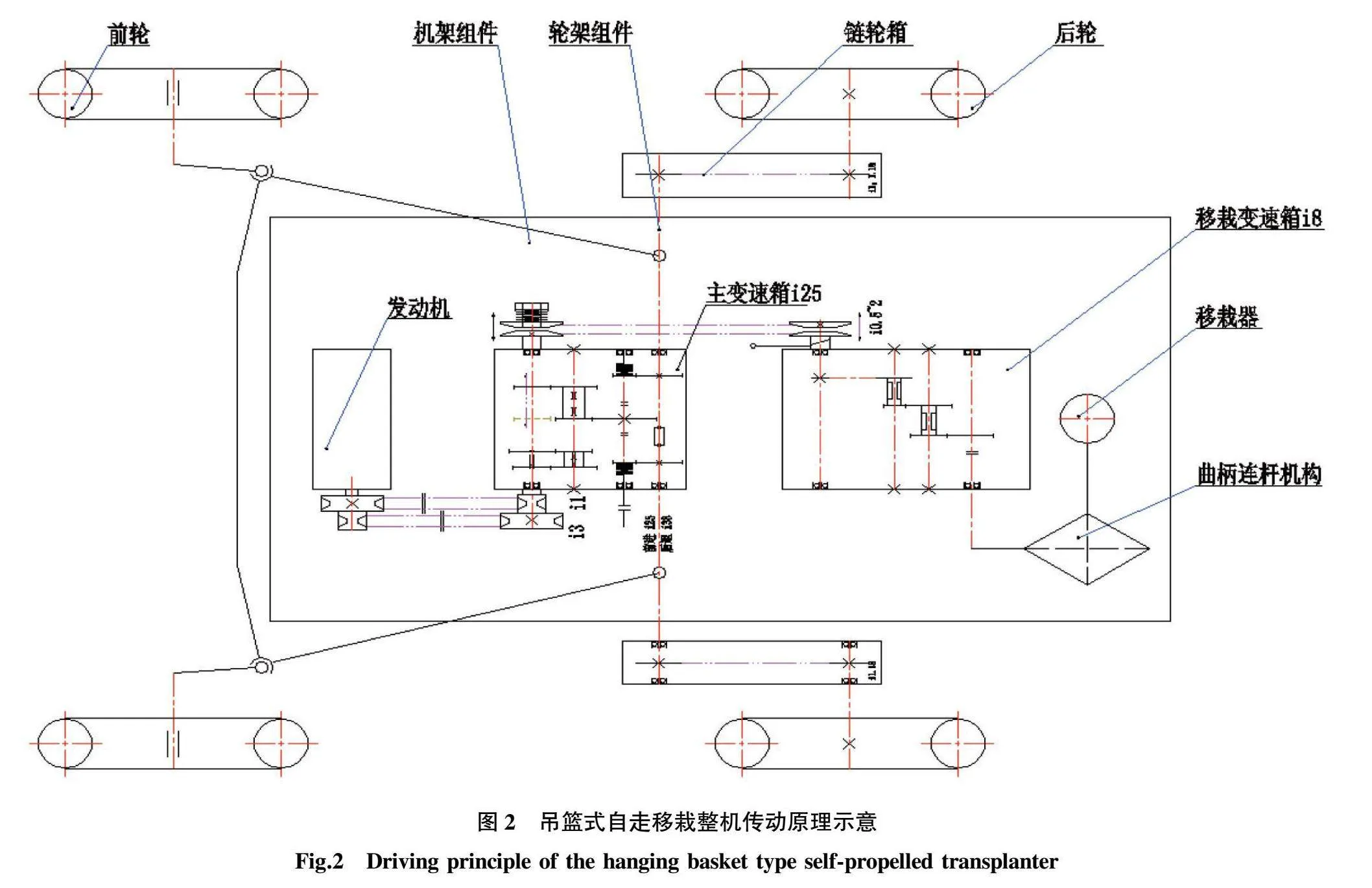
1.2 工作原理
吊篮式自走移栽整机工作原理如图2所示。工作时发动机的动力通过2级塔轮机构、张紧机构经带传动把动力传递到主变速箱,使主变速箱根据工作需求获得2种输入转速。经主变速箱变速后的输出动力分为2路输出(驱动行走输出和驱动移栽输出),驱动行走输出通过轮架组件中的转轴及链轮箱中的链传动把动力传递给后轮(驱动轮),在前轮的辅助作用下实现整机行走功能。另外,还可以通过升降调整机构调整链轮箱与轮架组件的相对位置,实现机架相对于地面的高度,满足不同垄高、地形、移栽深度等需求。驱动移栽输出通过工作直径可手动调节的无级变速带轮经带传动把动力传递给移栽变速箱,使移栽变速箱获得不同的移栽速度。经移栽变速箱变速后把动力传递给曲柄连杆机构,由曲柄连杆机构中的平行四边形机构驱动鸭嘴运动,由平行四边形机构的特性来保证鸭嘴在整个运动过程中处于铅锤状态,保证移栽秧苗的直立度[9]。由于移栽变速箱的输入速度可以无级调节,其驱动的曲柄连杆机构的工作频次就可以调节,从而实现移栽株距的调节。为了实现自动喂料,曲柄连杆机构还带动自动喂料转盘机构转动,自动喂料转盘机构是一个间歇运动机构,由转盘和12个苗杯组成,当鸭嘴上移到极限位置时,自动喂料盘机构中苗杯下口打开,使秧苗落入鸭嘴中,实现往鸭嘴中投苗的功能。投苗后的鸭嘴开始下移,当鸭嘴移动到下极限位置时(鸭嘴扎入土中,入土深度可根据秧苗移栽深度要求调节),鸭嘴打开,把秧苗植入土中,完成移栽。
2 关键部件的设计
2.1 曲柄连杆移栽投苗机构的设计
移栽质量的好坏需移栽机构来保证[10]。投苗过程中会不会出现夹苗、伤苗、漏投、能不能准确地投到鸭嘴中是由投苗机构来保证的。因此,曲柄连杆移栽投苗机构是移栽机的关键部分。为保证移栽质量,移栽机构采用平行四边形机构驱动鸭嘴的运动。为实现投苗的准确性,投苗机构的运动由移栽机构驱动,保证鸭嘴运动与投苗运动的协调性[11]。
2.1.1 移栽机构的设计。
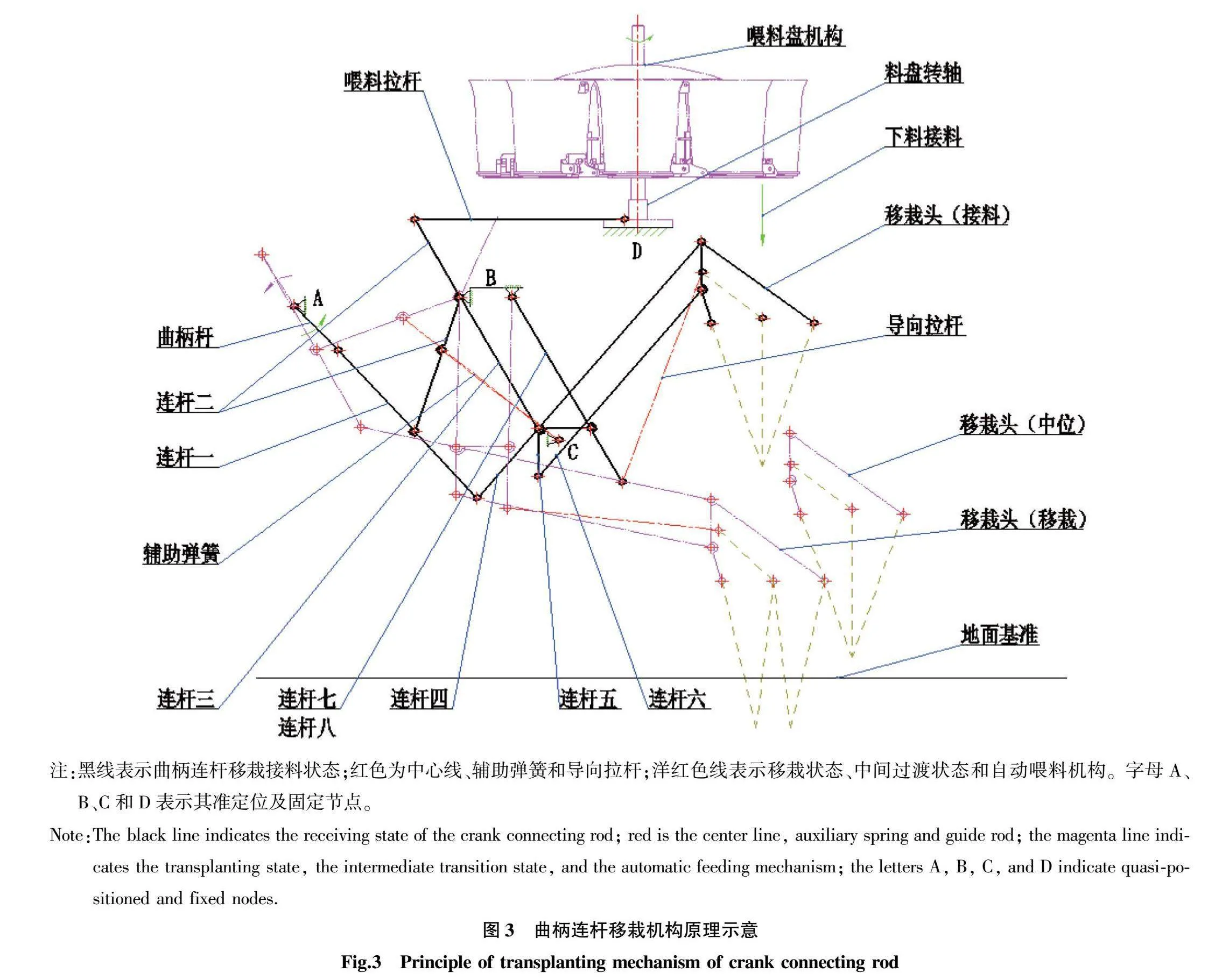
移栽机构主要由曲柄连杆机构和鸭嘴组成,是移栽机的关键部件之一。曲柄连杆机构主要功能是驱动鸭嘴运动,保证鸭嘴在运动过程中始终处于铅锤状态,保证秧苗栽植后的直立度[12]。曲柄连杆机构采用多连杆机构,如图3所示,由曲柄杆和8个连杆组成,其中连杆三、连杆七通过固定铰接点B和直角型连杆五构成平行四边形机构,连杆四、连杆六通过直角型连杆五和鸭嘴杆件构成平行四边形机构,2个平行四边形机构通过直角型连杆五实现联动。工作时曲柄杆做整周转动,通过连杆一带动2个平
行四边形机构绕固定铰接点B联动,带动鸭嘴(移栽头)上下运动;同时通过连杆二带动喂料拉杆驱动喂料盘转动,实现投苗功能。当鸭嘴(移栽头)运动到上极限位置时,投苗装置打开,秧苗落入鸭嘴(移栽头)中;当鸭嘴(移栽头)运动到下极限位置时(鸭嘴入土一定深度)打开,实现栽苗。
2.1.2 投苗装置的设计。
投苗装置是移栽机的关键部件之一,是把秧苗喂入栽植器(鸭嘴)的装置。该投苗装置如图4所示,主要由苗杯安装盘、苗杯、苗杯驱动轴、杯底支撑圈等组成。其结构特点是苗杯上端安装在苗杯安装盘上,苗杯安装盘通过键链接安装在苗杯驱动轴上,由苗杯驱动轴驱动苗杯转动。苗杯底部结构为拍门结构,杯底通过销轴、弹簧与杯体相连,在弹簧作用下可自动打开,因此苗杯底部由安装在侧板固定不动的杯底支撑圈驱动实现封堵,杯底支撑圈与鸭嘴对应处有缺口,当苗杯转到该缺口处时,苗杯底部打开苗杯中的秧苗在自重作用下落入鸭嘴中。为减轻投苗人员的劳动强度和增加投苗的方便性,苗杯转盘转速越低越有利于投苗,参考人体1 min抓取频次和苗杯转盘速度合理设计苗杯转盘直径,使苗杯安装盘沿圆周安装10只苗杯时投苗最方便。
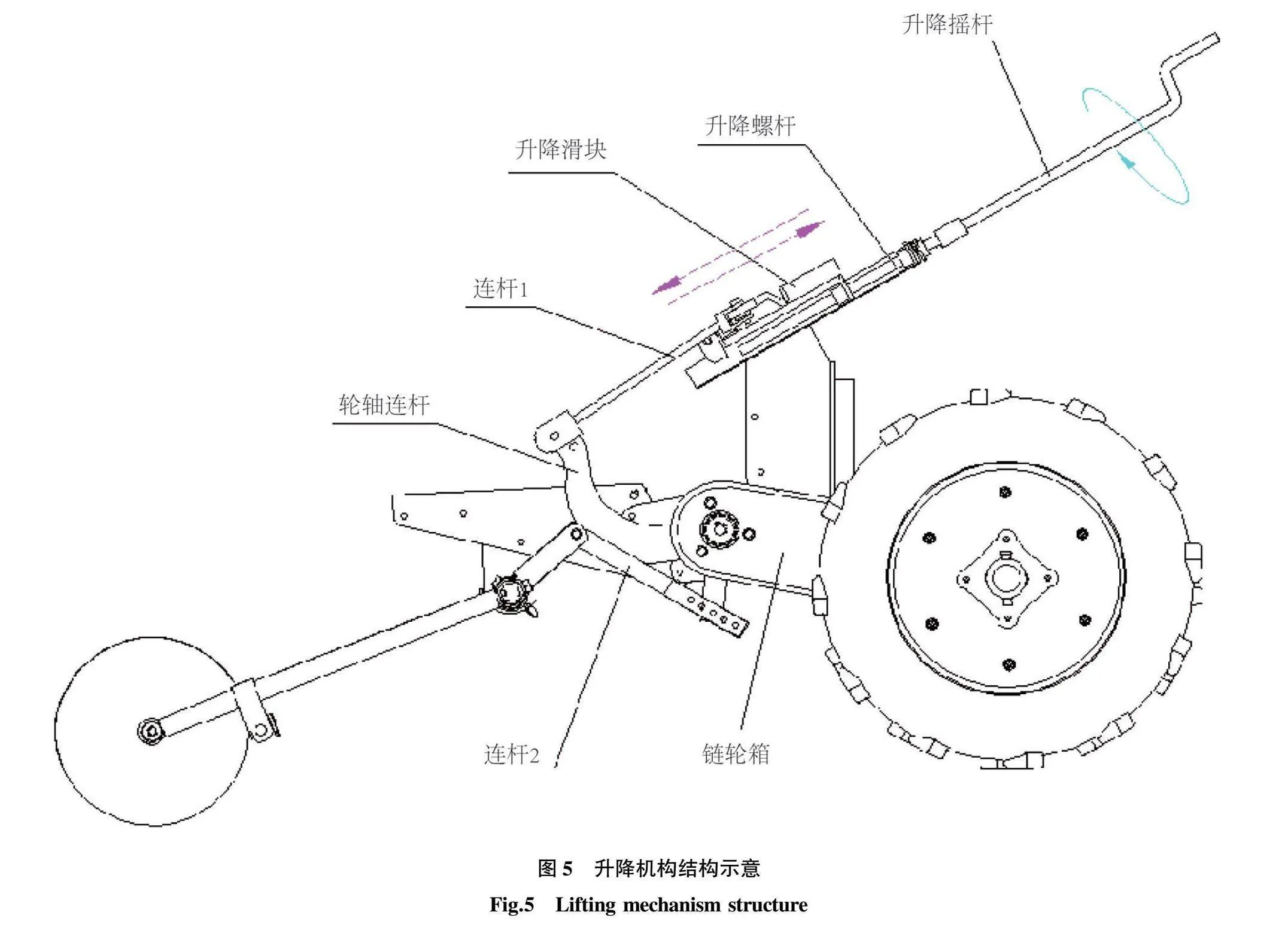
2.2 升降机构的设计
升降机构是移栽机实现不同移栽深度调节的关键部件之一,移栽升降机构的结构如图5所示,主要由升降摇杆、升降螺杆、升降滑块、连杆1、轮轴连杆、连杆2等组成。其工作过程为旋转升降摇杆带动升降螺杆转动,升降螺杆转动带动升降滑块提升(下降)移动,升降滑块的移动通过连杆1带动轮轴连杆驱动轮轴外套绕轮轴转动,由于轮轴外套与链轮箱是一体的,从而带动安装轮子的链轮箱绕轮轴转动,使机架相对地面的高度发生改变即机架升降,实现移栽深度调节。
3 性能试验与分析
3.1 试验概况
吊篮式自走移栽机的技术和性能试验按照JB/T 10291—2013《旱地栽植机械》标准规定进行,并制定了吊篮式自走移栽机产品试验大纲。
试验时间:2023年4月5日—5月10日;
试验地点:许昌市西南襄城县王洛镇许昌烟草分公司6 700 hm2烟田示范区;
试验条件:起垄移栽。垄高400~500 mm,试验用苗为漂浮育苗烟苗,烟株总高度150 mm[13]。
3.2 试验内容与结果
3.2.1 空载试运转试验。
空载运行即机具在不栽植秧苗情况下的运行,在该状况下机具各运动零件运转良好,无卡滞和异响现象;机构调整灵活准确,移栽深度和移栽株距的调节可满足农艺要求;投苗机构投苗准确无误,无夹苗和挡苗现象。
3.2.2
移栽性能试验。该试验为在某一调整值下从移栽过的烟垄中根据标准规定随机抽样检测10次,试验结果见表1。
表1表明:移栽深度、漏栽率、株距变异系数,都在标准要求范围内(标准要求移栽深度h±2 cm1 cm、漏栽率≤5%、株距变异系数≤25%),移栽质量完全满足烟草移栽的农艺要求。
4 结论
吊篮式自走移栽机各性能指标符合设计要求,机具具有以下特点:
整机结构轻巧、转弯灵活、操作简单,可一次性完成秧苗预装、起垄打孔、秧苗移栽、覆土镇压等多道工序;
移栽器采用曲柄连杆的工作原理,动力传动成穴系统为机械方式,移栽器自成一体,配合合理稳定可靠;
移栽速度快、简单省力,一些调整部分采用绞性连接,方便调整维修;
升降机构可以有效调节移栽深度,并有相应水平调节装置,适合于多种小角度倾斜地形移栽;
无级变速调节装置调节移栽株距,调节范围广,适合多种株距不同类型作物移栽种植。
总之,机具结构合理,能满足丘陵地块规模化烟草移栽工序的农艺要求,具有作业效率高、移栽深度一致性好、转弯半径小、操作方便等优势。使用移栽机时,建议做到农艺适应农机,在耕整地、起垄方面满足机具的使用要求,以便减少机具使用时的调整工时,更好地发挥机具的效率、提高机具的作业质量。
参考文献
[1] 燕亚民,乔新丽,张贵明,等.烟草移栽机送苗装置设计与试验[J].中国农机化学报,2020,41(4):24-28.
[2] 燕亚民,王双.导苗管式烟草移栽机的设计[J].青岛农业大学学报(自然科学版),2017,34(2):147-151.
[3] 张为政,王君玲,张祖立.悬杯式蔬菜移栽机的设计[J].农机化研究,201 33(8):104-106.
[4] 李民朝,燕亚民.2YZS自走式烟草移栽机的设计[J].农机化研究,2012,34(7):154-156,160.
[5] 王君玲.蔬菜移栽机栽植机理分析及试验研究[D].沈阳:沈阳农业大学,2006.
[6] 封俊,秦贵,宋卫堂,等.移栽机的吊杯运动分析与设计准则[J].农业机械学报,2002,33(5):48-50.
[7] 张茜,刘磊,陈永成,等.吊篮式移栽机栽植器运动轨迹研究[J].农业机械,2009(14):107-109.
[8] 冯朝印,燕亚民.3DJY-45型多功能烟苗剪叶机的设计[J].云南农业大学学报,2014,29(1):100-105.
[9] 燕亚民,杨富营,程祖国.4CRZ-424型烟叶采收植保机行走装置的设计[J].中国农机化学报,2019,40(5):58-6 139.
[10] 陈明.蔬菜移栽机的发展概况及结构特性[J].农村牧区机械化,2010(1):29-30.
[11] 司志平.烟草机械中平动机构的应用[J].大众标准化,2023(3):120-122.
[12] 温永涛.农业机械自动化控制技术在现代农业生产中的应用[J].南方农机,2023,54(6):72-74.
[13] 李昊凯.烟草机械送烟机构设计与性能测试[J].中国新技术新产品,2022(21):38-40.