IspecHyper多旋翼无人机高光谱影像处理方法研究
2024-09-20马灿达苏秋群谢国雪黄启厅杨绍锷张秀龙林垚君





摘要 为解决IspecHyper(莱森光学)多旋翼无人机高光谱成像系统缺乏数据处理配套软件,采集多航带高光谱数据误差大、坐标缺失、无法自动拼接等问题,以武鸣区太平镇角龙村柑橘种植基地为研究区,开展IspecHyper多旋翼无人机高光谱影像处理方法研究。首先,利用IspecHyper-VM200成像系统获取研究区高清照片和多航带高光谱影像数据;其次,以高清照片为数据源,通过PXI4D Mapper软件预处理和ENVI软件影像几何校正,形成高分辨率无人机正射影像;最后,利用ENVI软件裁剪多航带高光谱影像扭曲边界数据,以无人机正射影像为基准完成几何校正,进而通过影像镶嵌和光谱转换计算,形成高光谱反射率影像产品。结果表明,该研究形成的技术方法可有效解决IspecHyper多旋翼无人机高光谱影像处理存在问题,同时为无人机高光谱影像处理提供技术参考。
关键词 遥感;IspecHyper;无人机;高光谱影像;图像处理
中图分类号 P231 文献标识码 A 文章编号 0517-6611(2024)17-0233-05
doi:10.3969/j.issn.0517-6611.2024.17.053
Research on Hyperspectral Image Processing Method of IspecHyper Multi-rotor UAV
MA Can-da, SU Qiu-qun, XIE Guo-xue et al
(Agricultural Science and Technology Information Research Institute, Guangxi Academy of Agricultural Sciences, Nanning, Guangxi 530007)
Abstract In order to solve the problems of IspecHyper multi-rotor UAV hyperspectral imaging system, such as lack of data processing supporting software, large error in collecting multi-band hyperspectral data, lack of coordinates, and inability to automatically stitch. Taking the citrus planting base of Jiaolong Village, Taiping Town, Wuming District as the research area, this paper studies the hyperspectral image processing method of IspecHyper multi-rotor UAV. Firstly, the IspecHyper-VM200 imaging system was used to obtain high-definition photos and multi-band hyperspectral image data of the study area. Secondly, using high-definition photos as data sources, high-resolution UAV orthophotos were formed by PXI4D Mapper software preprocessing and ENVI software image geometric correction. Finally, the ENVI software was used to cut the distorted boundary data of multi-band hyperspectral images, and the geometric correction was completed based on the UAV orthophoto image, and then the hyperspectral reflectance image product was formed through image mosaic and spectral conversion calculation. The experimental results show that the technical method formed in this paper can effectively solve the problems of hyperspectral image processing of IspecHyper multi-rotor UAV, and provide technical reference for hyperspectral image processing of UAV.
Key words Remote sensing;IspecHyper;Unmanned aerial vehicle;Hyperspectral;Image processing
基金项目 国家自然科学基金项目(42061071);广西科技重大专项(桂科AA22036002);广西创新驱动发展专项(桂科AA18118046);广西农业科学院科技发展基金资助项目(桂农科2022JM47,桂农科2024YP065,桂农科2021ZX03)。
作者简介 马灿达(1992—),男,广西南宁人,工程师,从事农业遥感技术应用研究。通信作者,工程师,硕士,从事农业遥感技术应用研究。
收稿日期 2023-09-27
随着遥感对地观测技术的不断发展,无人机遥感影像的采集与处理能力日渐强大,无人机能够较好降低气候条件的影响,克服空间分辨率不足,提高工作效率等性能,使其成为支撑中小区域遥感监测不可或缺的重要手段。早在20世纪80年代初,出现了将光谱融入遥感影像当中[1],随着光谱传感器的不断提高和对地物光谱认知的不断加深,形成无人机和高光谱成像技术相结合的新型低空高光谱遥感技术。
无人机高光谱技术具有作业高效、光谱维数高、低风险等特点,可同时反映地物的空间和光谱特征[2],被广泛应用在农业、水质监测、林火监测、海洋探测等领域[3-7],成为越来越多国内外研究者的重点研究方向。随着行业领域对无人机高光谱成像仪的需求,市场上推出了不同型号的设备,包括IspecHyper、Sinespec(赛斯拜克)、Specim(芬兰)、HyperSIS(卓立汉光)等主流产品。然而,目前诸多商业无人机影像处理软件Inpho、PIX4D Mapper、PhotoScan、PIE-UAV、Correlator3D等无法处理无人高光谱影像[8]。为解决无人机高光谱图像处理难题,不同学者开展了无人机高光谱图像几何校正、匹配方法、拼接技术等研究[9-11]。
虽然现有研究成果为无人机高光谱图像处理提供技术参考,但不同设备采集数据及处理方法差异较大。当前关于IspecHyper系列图像处理技术报道甚少,鉴于此,笔者以IspecHyper-VM200高光谱影像为对象,开展影像处理方法研究,以期解决该设备缺乏数据处理匹配软件、获取的多航带高光谱数据误差大、坐标缺失、无法自动拼接等问题,同时为无人机高光谱影像处理提供技术参考。
1 研究区概况
武鸣区隶属于广西壮族自治区首府南宁市(107°49′~108°37′E,22°54′~23°32′N),坐落于广西中部,南宁市北部,东与上林县、宾阳县交接,西与隆安县、平果县相邻,南接南宁市区,北邻马山县。地势呈东高西低,东部大明山连绵高耸,向东北、东南延伸,构成北、东、南三面环绕型高丘陵山区,西部多为高土坡相连,中部为丘陵、平原相间交错的小盆地带。气候属于亚热带季风气候,全年光照充足,雨量充沛,年平均气温约为22 ℃。武鸣区面积约为3 378 km2,辖区有13个镇和1个经开区,人口约为72.70万人,耕地面积约为10万hm2,盛产水稻、玉米、花生、甘蔗、木薯、水果等作物,其中柑橘类为特色农作物,近年来柑橘产业规模不断扩大,成为广西最大的沃柑种植生产区,有“世界沃柑看中国,中国沃柑看武鸣”的美誉。
2 技术方法
2.1 数据获取
选取武鸣区太平镇角村柑橘种植基地为目标区域,利用大疆M600pro无人机搭载莱森IspecHyper-VM200成像仪,包括1 500万像素高清相机和光谱分辨率2.3 nm的高光谱相机,采集目标区域的无人机高清像片和高光谱航带影像数据。数据采集严格根据要求进行设备的安装与相关参数设定,7bvFEdJZFDTV+qfwnShDm6vR1qevRDnKnTBSubVQFhc=在光照充足稳定下进行拍摄。具体步骤如下:
①设备安装。严格根据要求进行设备安装,首先进行M600pro起落架的安装,打开GPS及螺旋桨器件进行RTK主副元件的安装,通过云台将莱森IspecHyper-VM200成像仪安装在无人机下方,利用三脚架进行地面站的安装,紧接进行成像仪与地面站天线的安装及照度计和反射率板放置铺设,最后进行电源设备的安装及各设备运行检测。
②航前规划。将无人机进行指南针校准,再通过移动PC端对地面站进行校准,然后根据照度值利用地面站软件进行积分时间换算,再进行航迹规划,根据分辨率的需求选择适合的飞行高度,通过速高比确定航速,利用视场角和重叠率计算航带间距,依据航带间距、飞行高度和速度规划航带。
③数据采集。完成目标区飞行任务规划后,在地面站软件中更改换算所得的积分时间,当无人机飞到第一个航点时,通过地面站软件开始数据采集,该试验共采集8条高光谱航带数据。
2.2 处理技术
为解决莱森IspecHyper-VM200高光谱成像仪采集的高光谱航带数据扭曲、错位与坐标缺失的问题,综合利用PIX4D Mapper、ArcGIS、ENVI软件,通过无人机影像处理(可见光)、影像裁剪、几何校正与影像镶嵌处理,形成研究区合格完整的高光谱影像数据。该研究的技术路线见图1,包括无人机正射影像生产与几何校正、高光谱航带影像裁剪、高光谱航带影像几何校正与镶嵌和高光谱影像光谱转换计算。为保证高光谱影像几何校正坐标精度,减少因影像地物信息不一致、分辨率差异和同名点(控制点)选取难度大等因素对几何校正造成影响,利用IspecHyper-VM200成像仪的高清像片数据和GPS文件进行无人机正射影像数据生产,以校正后的无人机正射影像作为高光谱航带数据几何校正的基准影像。
2.2.1 无人机正射影像生产与几何校正。
IspecHyper-VM200成像仪可获取高清像片位置坐标,但GPS数据记录条数与高清像片数量不一致,需要根据高清像片获取时间筛选与之匹配的坐标信息,形成PIX4D Mapper软件支持的标准POS文件。PIX4D Mapper是一款全自动数据处理系统,具有智能快速、无需人工干预的优势,被广泛应用于无人机正射影像生产。受天气、光照、镜头等因素影响,获取原始的高清像片色彩不均匀,通过直方图、反差拉伸、色彩增强等预处理,使其数据清晰、反差适中、信息丰富、色彩真实、色调统一,进而将预处理后的高清像片和POS数据导入软件,经过空中三角测量和点云加密处理,生成无人机正射影像初级产品。因数据生产过程缺乏地面控制点数据,形成的初级产品与实际地理位置发生偏移,利用0.5 m分辨率的谷歌影像为基准,利用ArcGIS软件Georeferencing工具的Spline算法完成无人机正射影像的几何校正,输出无人机正射影像分辨率为0.03 m,投影坐标系为WGS_1984_UTM。
2.2.2 高光谱航带影像裁剪。
IspecHyper-VM200成像仪获取的高光谱航带数据缺乏坐标信息,数据边缘区域扭曲、拉花、错位现象明显,借助ENVI软件完成航带数据无效区域裁剪。在软件中利用ROI工具绘制有效区域范围线,再通过Subset data from ROIs工具根据各航带感兴趣区域进行高光谱影像裁剪,剔除各航带扭曲、拉花和错位的信息,形成多航带高光谱有效影像。
2.2.3 高光谱航带影像几何校正与镶嵌。
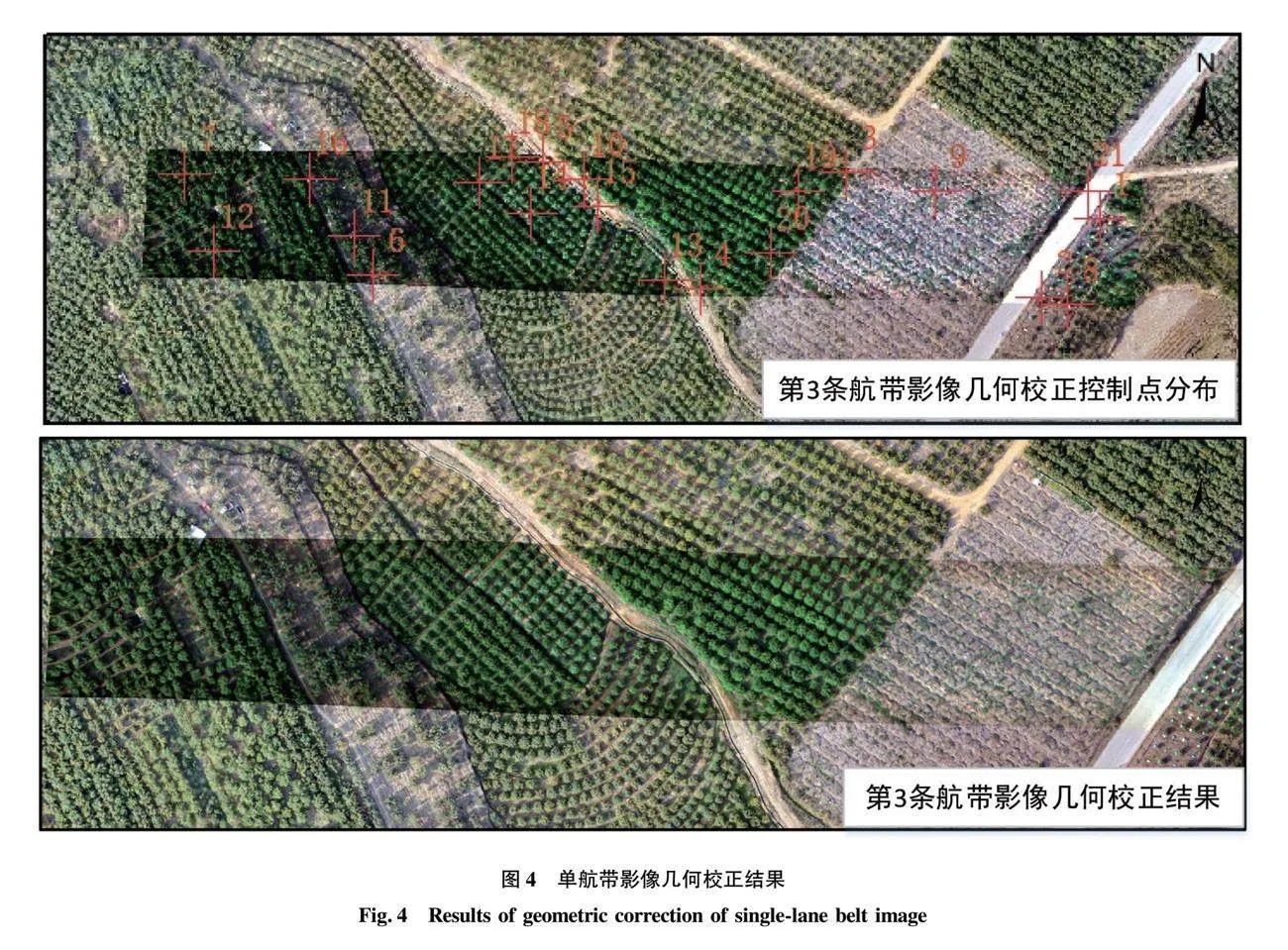
为解决高光谱航带数据坐标丢失和几何畸变问题,以几何校正后的无人机正射影像为基准,利用ArcGIS软件Georeferencing工具分别完成多航带数据几何校正,其中每条航带数据选取10个以上均匀分布的同名点,利用Spline方法完成几何校正,检查控制点以及整体校正精度,满足要求则输出产品。单航带高光谱影像覆盖区域较小,且分航带数据不利于后期使用,为此利用ENVI软件的Seamless Mosaic工具开展影像镶嵌,完成航带数据无缝拼接,形成完整的高光谱影像数据。
2.2.4 高光谱影像光谱转换计算。
为获取高光谱影像准确的光谱反射率,利用反射率转换公式进行计算,公式如下所示:
DN1DN2=SR1SR2
式中:DN1为高光谱影像的辐射量;DN2为定标板的辐射量;SR1为高光谱影像光谱反射率;SR2为定标板的光谱反射率。以镶嵌后的高光谱影像数据为对象,利用ENVI软件Spectral Math功能完成高光谱影像的光谱反射率计算。
3 结果与分析
3.1 无人机正射影像成果
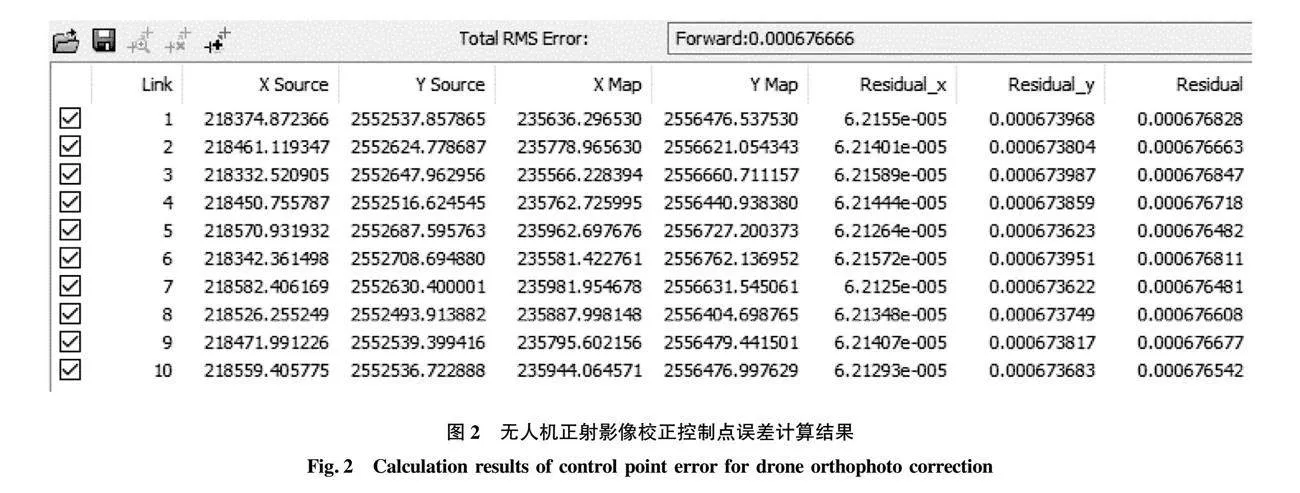
通过PIX4D Mapper软件自动化生产以及ArcGIS软件几何校正处理,形成无偏移的无人机正射影像(分辨率为0.03 m),要求校正结果误差小于1个像元,选取10个同名点误差计算结果见图2,图中显示每个控制点x轴、y轴方向误差较小,总体误差为0.000 68 m,同时通过卷帘工具查看基准影像和校正结果偏移情况,精度均满足质量要求,校正后的无人机影像成果见图3。
3.2 无人机高光谱影像成果
经过ENVI软件裁剪处理后形成高光谱航带有效数据,利用ArcGIS软件分别开展航带影像几何校正处理,解决了高光谱影像数据坐标丢失问题,为避免影像镶嵌接边区域出现错位现象,需要严格把控单航带影像校正精度,要求每条航带误差小于1个像元,8条航带
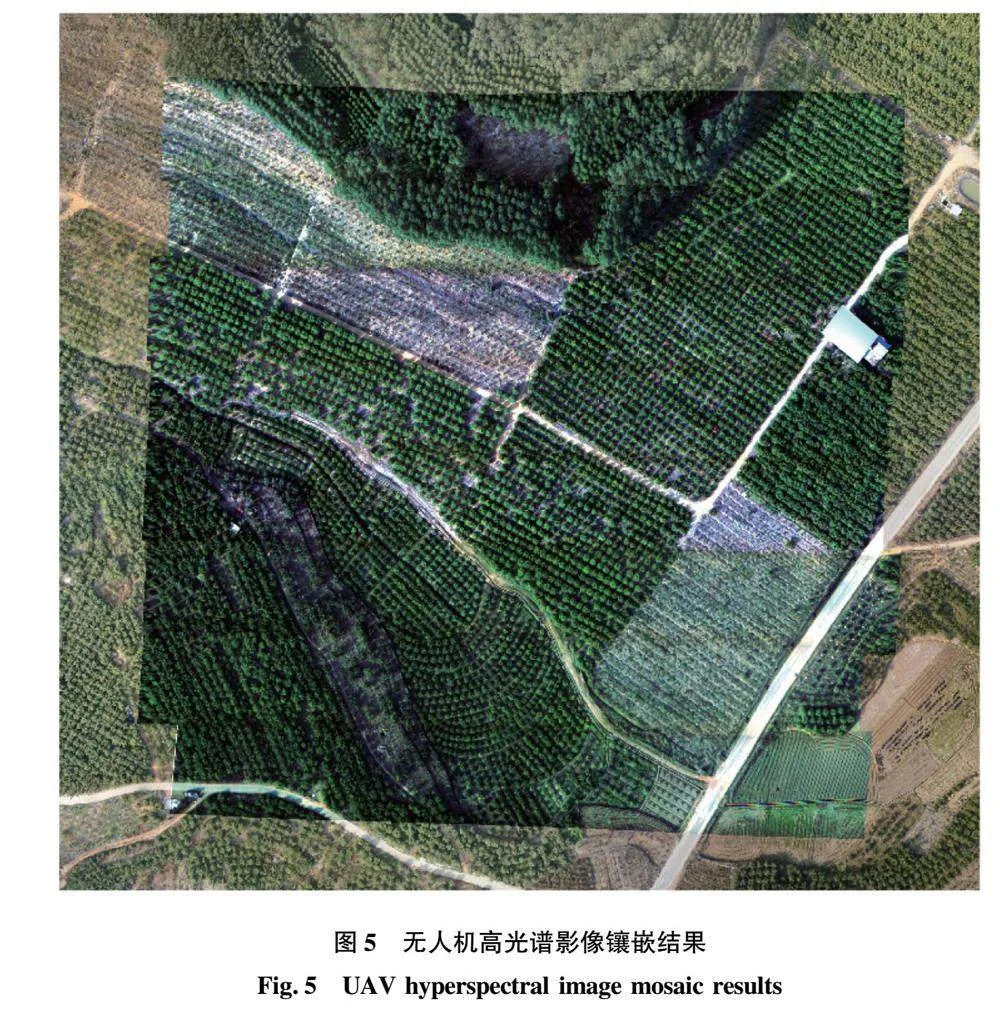
影像几何校正总体误差如表1所示。无人机高光谱影像空间分辨率为0.1 m,单航带影像校正误差最大值为0.009 5 m,8条航带影像平均误差0.005 8 m,满足质量要求。利用校正后航带数据开展影像镶嵌,形成完整的高光谱影像,通过光谱转换计算,获取影像数据的光谱反射率。单航带影像控制点选取及校正结果如图6所示,高光谱影像镶嵌结果和光谱反射率提取结果分别如图5、6所示。
4 结语
该研究对IspecHyper多旋翼无人机高光谱影像处理技术
方法进行了研究,综合利用PIX4D Mapper、ArcGIS和ENVI软件形成一
套有效的处理技术,包括无人机正射影像生产、无人机正射影像几何校正、高光谱航带数据裁剪、单航带高光谱影像几何校正、航带高光谱影像镶嵌和高光谱影像光谱转换。无人
机正射影像几何校正总体误差为0.000 68 m,单航带高光谱影像校正误差均小于0.009 5 m,8条航带影像平均误差0.005 8 m,处理后影像结果精度较高。研究的方法有效解决了IspecHyper多旋翼无人机高光谱成像仪缺乏数据处理配套软件,以及获取的航带数据坐标缺失、边缘地区扭曲、无法自动镶嵌等问题。
参考文献
[1] 童庆禧,张兵,张立福.中国高光谱遥感的前沿进展[J].遥感学报,2016,20(5):689-707.
[2] 张晶晶,杨盼,张德成.无人机高光谱影像处理方法的探索[J].北京测绘,2022,36(9):1139-1144.
[3] 李明,黄愉淇,李绪孟,等.基于无人机遥感影像的水稻种植信息提取
[J].农业工程学报,2018,34(4):108-114.
[4] 兰玉彬,朱梓豪,邓小玲,等.基于无人机高光谱遥感的柑橘黄龙病植株的监测与分类[J].农业工程学报,2019,35(3):92-100.
[5] 王锦锦,李真,朱玉玲.高光谱影像在海洋环境监测中的应用[J].卫星应用,2019(8):36-40.
[6] 乔雯钰,龙亦凡,付杰.基于波段组合的高光谱数据湿地分类研究[J].北京测绘,2020,34(5):651-656.
[7] 张敏,刘涛,孙成明.基于无人机高光谱数据的小麦生物量估测[J].安徽农业科学,2023,51(17):182-186,189.
[8] 李梓豪,唐超,郭文远.改进的无人机影像处理技术在新冠疫情复工建设中的应用[J].测绘通报,2020(7):53-57.
[9] 周蕊,欧毅,虞豹,等.多旋翼无人机载高光谱成像系统几何和辐射校正方法研究[J].西南大学学报(自然科学版),2019,41(9):141-147.
[10] ZHENG J,XU Q Z,ZHAI B,et al.Accurate hyperspectral and infrared satellite image registration method using structured topological constraints[J].Infrared physics & technology,2020,104:1-10.
[11] 涂建刚,汪辉,徐成,等.基于图像与数据双层融合的高光谱图像拼接[J].激光与光电子学进展,2021,58(2):173-182.
