基于多源信息融合的果园移动机器人自主导航系统研究进展
2024-09-20李小明冯青春

摘要 水果产业是我国农业农村重要的经济支柱之一,当前果园生产管理水平、特别是机械化、信息化水平相对落后。基于多源信息融合的果园移动机器人可实现复杂环境下稳定、高精度的自主导航,为果园移动平台提供了智能、高效的自主导航手段,有力支撑了智慧果园的建设。分析基于多源信息融合的果园移动机器人自主导航系统研究现状,指出研究的关键问题,提出了结合果园实际复杂、多样工况的环境,围绕定位与建图、路径规划与决策控制策略等关键技术,通过多源传感器信息融合策略,实现复杂环境下的自主导航的研究方案。
关键词 果园;移动机器人;多源信息融合;自主导航;SLAM
中图分类号 S23 文献标识码 A 文章编号 0517-6611(2024)17-0017-05
doi:10.3969/j.issn.0517-6611.2024.17.004
Research Progress of Autonomous Navigation System for Orchard Mobile Robot Based on Multi-source Information Fusion
LI Xiao-ming1,FENG Qing-chun2
(1.Beijing Vocational College of Agriculture,Beijing 102208;2.Intelligent Equipment Technology Research Center of Beijing Academy of Agriculture and Forestry,Beijing 100097)
Abstract Fruit industry is one of the important economic pillars of China’s agriculture and rural areas.The current orchard production management level,especially the mechanization and information level,is relatively backward.Orchard mobile robot based on multi-source information fusion can realize stable and high-precision autonomous navigation in complex environment,provide intelligent and efficient autonomous navigation means for orchard mobile platform,and strongly support the construction of smart orchard.By analyzing the research progress of orchard mobile robot autonomous navigation system based on multi-source information fusion,this paper proposes to combine the actual complex and diverse working conditions of orchard,focus on key technologies such as positioning and mapping,path planning and decision control strategy,and based on the existing mobile platform,study the multi-source sensor information fusion strategy to achieve autonomous navigation in complex environment.The performance of the autonomous navigation system is verified by field tests.
Key words Orchard;Mobile robot;Multi-source information fusion;Autonomous navigation;SLAM
基金项目 北京市教育委员会资助项目(KM202112448001);北京农业职业学院教学改革项目(202236);新疆兵团科技合作计划项目(2022BC007)。
作者简介 李小明(1987— ),男,福建邵武人,副教授,博士,从事农业机械化及其自动化研究。
收稿日期 2023-09-27
水果产业是我国农业农村重要的经济支柱之一,当前果园生产管理水平、特别是机械化、信息化水平相对落后。果园环境不像传统的水稻、玉米等露天、可操作性较好的环境,且在果树的生长周期中,需要灌溉、施肥、修枝、除草以及采摘等多种作业。果园的半结构化环境也限制了拖拉机等大型农机装备在其中进行作业,因此更加限制了果园机械化的发展。在劳动力稀缺和人口老龄化的今天,农业机器人成为智能农机装备和精准农业不可或缺的一部分。在果园的自动化管理流程中,自主导航技术赋予了机器人独立在果园中导航和作业的能力,是确保果园高效、精准管理的重要支撑。机器人需要通过自身传感器信息和算法处理实现在果园环境中的精准定位,以及确定周围环境信息,实现在果树行之间自主导航的功能。果园移动机器人自主导航技术对提高我国农机装备智能化的发展具有重要意义。
当前,多源信息融合技术在不断地发展,诸多学者将GNSS/INS与激光SLAM相融合,研究基于多源信息融合的果园移动机器人自主导航系统,并获得重要进展。基于多源信息融合的果园移动机器人可实现复杂环境下稳定、高精度的自主导航,为果园移动平台提供智能、高效的自主导航手段,有力支撑智慧果园的建设。该研究分析基于多源信息融合的果园移动机器人自主导航系统研究现状,指出研究的关键问题,提出研究方案,以期为无人化智慧果园建设提供借鉴。
1 基于多源信息融合的果园移动机器人自主导航系统国内外研究进展
随着全球范围内对智能机器人技术研究的持续升温,国内外众多学者纷纷将研究焦点转向农业机器人领域,致力于推动该领域的创新与发展。在果园环境中,机器人的定位和对环境的特征提取是需要解决的难题。果园机器人自主导航技术最重要的两个方面是感知定位和决策控制。要实现机器人的自主导航,首先,机器人要对自身周围环境进行感知,并对自身所处位置有明确的定位;其次,机器人要根据自身定位和环境感知进行路径规划,设计出最优线路并控制机器人按照规划的线路行驶。经过研究人员坚持不懈的研究,该领域已经取得了很多成果。
1.1 国外研究进展 针对果园移动机器人自主导航的研究,国外的研究历史可以追溯至20世纪50至60年代,这一时期已经开启了相关领域的探索,目前积累了多种自主导航的方案。按照传感器的不同,自主导航可分为卫星导航、惯性导航、激光导航、视觉导航以及多传感器融合等。
果园机器人通常工作于开放式的室外环境,面对这样的环境,GNSS技术展现出了其独特的优势。由于GNSS在室外无遮挡的条件下能够实时、准确地提供绝对定位信息,且具备高精度和全天候工作的特点,它自然成为了露天农业作业环境中不可或缺的导航手段。Han等[1]成功研发了一种基于RTK-GNSS技术的自动驾驶系统,该系统被广泛应用于商业化的农业高速喷雾机中。这套系统的独特之处在于,它无需预先构建复杂的果园地图,而是依赖用户手动驾驶车辆时收集的位置信息来设定GNSS上的作业路径,从而大大降低了计算成本。在路径追踪方面,系统利用航路点以及GNSS实时提供的定位、航向和速度信息,精准计算出机器人平台的控制参数。经过严格的测试,该系统在果树行距相对较大的作业环境中,展现出了极高的定位精度,达到了0.01 m的水平。这一成果不仅证明了RTK-GNSS技术在农业自动化领域的广泛应用潜力,也为未来果园机器人的智能化、精准化作业奠定了坚实的基础。Vadakke Veettil等[2]提出闪烁抑制技术,通过信号跟踪误差方差分配卫星和历元特定权重来改进用于位置计算的最小二乘随机模型。当在强闪烁条件下应用该技术时,3D定位误差可提高62%~75%。该方法提高了全球导航卫星系统定位的可靠性,可用于支持高精度要求的应用。尽管GNSS导航在开阔地带展现出了显著的优势和巨大的应用潜力,但在典型的果园环境中,由于果树树冠和树枝的密集遮挡,GNSS系统往往难以稳定接收卫星信号,这导致其适用性受到显著限制,无法准确完成导航任务。因此,单纯依赖卫星导航系统来执行果园作业是存在明显不足的。
惯性导航(inertial navigation system,INS)是一种自主式航位推算导航系统,通过加速度计、陀螺仪、转角传感器对机器人位姿信息进行计算。惯性导航系统不依赖于外部信息,全天候使用,不受外部环境影响,也不存在GNSS系统信号丢失的现象,短时间内的精度和稳定性十分可靠。但是系统存在累计误差,随着使用时间的增长,定位精度会逐渐降低。
即时定位与建图(simultaneous localization and mapping,SLAMS)的出现也为机器人提供了高精度的定位与导航信息。应用SLAM可以在未知环境中建立地图并确认自身所处位置。SLAM实质上是一种基于概率的最优估计问题。解决SLAM问题的方法可以考虑3种模式:扩展的卡尔曼滤波(extended kalman filter,EKF)方法、粒子滤波(particle filter,PF)方法和基于图优化的方法[3]。EKF-SLAM是最为古老也是最经典的范例,其利用世界参数表示机器人的姿态,要求机器人的姿态和坐标的概率分布函数都是高斯的,而且计算成本较高。粒子滤波利用Rao-Blackwell 理论用一组粒子演示了后验概率,不受EKF-SLAM做出的高斯假设的限制,假设每个坐标都独立于其他坐标,使得计算效率显著提高。Li等[4]提出了一种基于多任务特征提取网络和自监督特征点的深度学习实时视觉SLAM系统。通过设计一种简化的卷积神经网络来检测特征点和描述符,以取代传统的特征提取器,提高了视觉SLAM系统的准确性和稳定性。Sun等[5]提出了一种基于几何图元的激光SLAM点云质量改善方法,通过使用随机采样一致性算法提取扫描场景的几何图元来评估点云数据质量,并且将高精度点云定义为参考基准。此外,该方法还采用从参考基准中提取的原始参数构造约束条件,并对漂移点云数据进行坐标校正。试验证明,在没有全球导航卫星系统信号和特征点不足的区域,该方法能有效提高激光点云的质量。Koide等[6]提出了一个三维激光雷达的交互式图形SLAM框架。该框架允许用户交互式地校正由自动空间激光雷达系统生成的3D环境地图。通过优化由自动SLAM创建的姿态约束和由用户通过图形用户界面创建的地图校正约束组成的姿态图,获得大型且全局一致的3D环境地图。同时还提出半自动闭环和基于平面的地图校正技术来创建地图校正约束,并且设计了一种姿态约束更新方法,以改进自动SLAM给出的姿态约束。然而在室外非结构化环境下,SLAM精度较低,仅仅依靠SLAM不能支持果园高精度导航。
激光导航技术基于三角测距原理,能够精确地测量移动机器人周围物体与激光扫描仪之间的距离。近年来,激光测距仪凭借其卓越的测量精度、远距离测量能力以及丰富的距离信息,被广泛应用于移动机器人的自主导航系统中。Zhang等[7]提出了一种基于2D激光技术的果园车辆自动导航系统。在该系统中,其通过设定不同的阈值对激光点云中的离散点进行过滤,以提高数据的准确性。接着,其运用了欧式聚类算法和三点共线的几何原理,从经过滤波的点云中精准地提取出树干的中心点。最终,通过最小二乘法对这些中心点进行拟合,从而生成出准确的导航路径。这一设计不仅充分利用了激光导航技术的优势,还通过创新的算法和数据处理方法,实现了在复杂果园环境下的高精度自主导航。Jones等[8]基于多线激光雷达设计了猕猴桃园自主导航重型平台。对于激光导航技术而言,激光雷达在工作时容易受到天气和大气干扰,影响导航精度。
随着图像技术的不断成熟和成本效益的显著提升,视觉传感器在农业机器人自主导航领域的应用愈发广泛。Radcliffe等[9]设计了一套先进的机器视觉系统,系统结合了多光谱摄像机和个人计算机的功能,专注于树冠与天空的特征提取。系统通过分析这些特征并确定对象的质心,来引导无人地面车辆自主穿越树木行,确保车辆能够精准地沿树行中心行进。与此同时,Durand-Petiteville等[10]则采取了另一种方法,利用4个摄像机捕捉并生成代表环境的点云数据。通过对点云中由阴影形成的凹点进行检测,能够精确地识别出树干的位置,这种方法不仅提高了检测的鲁棒性,还优化了导航策略,为农业机器人的自主导航提供了更为可靠的技术支持。在视觉导航实验中,当果树行之间出现缺失空档,会对导航策略造成一定的影响。
单一的传感器在复杂多变的环境中往往存在固有的局限性,导致导航稳定性不佳。为了克服这一挑战,多传感器融合技术应运而生。该技术通过算法将不同传感器的信息进行融合,旨在结合各自的优势,弥补各自的不足,从而提高导航系统的整体性能和稳定性。这种多传感器融合的方法能够更全面地感知环境,提升导航的准确性和可靠性。Jger-Hansen等[11]提出一种采用GNSS和激光雷达的树位置估计算法,通过在果园中行进收集数据,并使用点云上的椭圆拟合来估计树的位置。Shalal等[12]提出一种基于摄像机和激光扫描仪数据融合的树干检测构建果园地图的新方法。Shamsudin等[13]通过GPS和LIDAR-SLAM融合导出一个权函数来保证各自优势实现消防机器人的地图一致性构建。Costley等[14]通过卡尔曼滤波器与IMU的信息融合设计出一种用于果园的导航系统。Qian等[15]通过利用GNSS/INS获得高精度的姿态和速度信息与SLAM提取丰富的特征融合大大提高了在森林中高精度定位的准确性和鲁棒性。
1.2 国内研究进展 相比于国外,国内针对农业机器人自主导航的研究起步较晚,近年来也获得了诸多成果。熊斌等[16]根据果园农用车辆作业需求设计出基于RTK-BDS的自主导航系统,同时将运动学模型和纯追踪模型结合设计了直线跟踪导航控制器,但依旧存在信号遮挡的缺点。
汤巍等[17]提出一种融合自适应渐消扩展卡尔曼滤波(adaptive fading extended kalman filter,AFEKF)和快速联合兼容关联的方法,建立了KFEKF-SLAM系统实现激光雷达智能小车的建图与定位。武二永等[18]提出一种在大规模环境下及与激光雷达SLAM的算法,通过选取稳定易区别的特征点发展了一种全局约束的关联方法。文国成等[19]则是采用子地图与子地图匹配的方法进行闭环检测,经过筛选优化闭环检测的候选集来解决大尺度地图中匹配失误和速度缓慢的问题。贾浩[20]通过激光SLAM建模并加入Lazy Decision算法改进了闭环检测的质量。刘沛等[21]采用激光导航的方式对果树信息进行采集,并采用最二小乘法和霍夫变换规划导航路径。李莹[22]利用三维激光扫描仪基于SLAM获得室内点云数据,并通过点云去噪、平面分割、边界提取的方法建立了室内三维线框模型。李会宾等[23]运用卡尔曼算法并结合三维激光雷达和随机抽样一致(RANSAC)算法,成功地优化了果园中的直线特征,提高了导航的精确度。张向阳[24]则通过激光雷达传感器收集果树的点云数据,并巧妙地采用霍夫变换和RANSAC算法,有效地提取了树行的直线特征,为果园机器人的自主导航提供了重要依据。李斌等[25]提出了一种创新的导航算法,该算法基于自适应遗传算法和样条曲线,能够更好地适应果园环境,实现机器人的自主导航。
聂森[26]针对果园环境的特殊性,开发了一种基于视觉HSV(hue,saturation,value)色彩模型和最大类间方差法的导航拟合方法,该方法通过识别果园中的颜色特征,实现了精确的导航路径拟合。叶小琴等[27]提出了一种基于图像边界提取的自主导航系统,通过均值偏移和图论的图像分割算法对采集的图像进行聚类、分割,并利用Canny算子对其边缘检测和滤波,采用Hough变换提取边界线从而获得导航线路。针对果园视觉导航线提取易受到光照、杂草等影响的问题,王毅等[28]提出了一种基于深度学习的方法来提取果园道路导航线,采用YOLOV3卷积神经网络提取果树行间特征点并通过最小二乘法拟合生成导航线路。
激光雷达SLAM全局定位较差,而视觉SLAM精度容易受到光照的影响,多传感器信息融合的技术可以弥补单一传感器的不足,提高SLAM自主导航的鲁棒性和精度[29]。刘树奇[30]将里程计与激光雷达扫描匹配进行信息融合,从而提高机器人在位置环境下导航精度。李秀智等[31]将深度相机和激光雷达数据分别使用自适应加权算法与贝叶斯方法进行数据融合,获得导航环境数据。陆世东等[32]在位姿图中加入了卫星定位节点,准确的定位回环检测点,达到激光雷达SLAM位姿全局一致性的效果。倪志康等[33]提出了一种创新的
同步定位与地图构建(simultaneous mocalization and mapping,SLAM)方法,该方法通过因子图融合三维激光雷达与实时动态载波相位差分技术(real-time kinematic,RTK)的数据。该方法对位姿信息增加了约束条件,从而有效减少了系统在长时间运行过程中的累计误差,提高了导航和地图构建的准确性和稳定性。聂森等[34]通过激光测距仪与机器视觉数据分析采用Hough变换和最小二乘法对导航线进行提取导航航向角,利用卡尔曼滤波对所获得的基于激光测距仪的导航航向角和基于机器视觉技术的导航航向角进行了拟合,从而得到了果园导航多方位组合信息的融合方法。
魏少东[35]选用了全球定位系统(GPS)与惯性导航(INS)的组合导航系统,利用GPS和陀螺仪作为核心导航传感器,开发了一套针对果园机械的自动导航控制系统。这套系统通过集成GPS的卫星定位数据和陀螺仪的惯性测量数据,实现了果园机械的精准导航和自动控制。冀鹏[36]则提出了一种基于先验地图的重定位算法,该算法将实时动态载波相位差分全球导航卫星系统(RTK-GNSS)与三维同步定位与地图构建(3D-SLAM)技术进行数据融合。通过在果园转弯处校正3D-SLAM算法的估计值,成功解决了SLAM算法在转弯处易于匹配失败的问题,从而提高了导航系统的稳定性和准确性。吴从磊[37]将EKF-SLAM算法、雷达、GNSS/INSS 3者进行信息融合,研究了果园拖拉机自主驾驶系统,大大提高了感知定位系统的性能。然而该系统缺少安全防撞功能,并且SLAM回环检测效果并未得到验证。
通过国内外对果园机器人自主导航的研究现状发现,现阶段针对果园环境导航,多数为人工事先巡点生成路径或生成先验地图供机器人导航使用,实时性并不高。多传感器对机器人状态数据估计不一致导致数据关联二义性干扰导航决策也是需要解决的难题之一。
2 基于多源信息融合的果园移动机器人自主导航系统研究关键问题
当前基于多源信息融合的果园移动机器人自主导航系统研究还存在一些瓶颈亟待解决。一是果园环境比较复杂,路面松软、不平整以及杂草等会对传感器数据采集造成影响,如何通过滤波的手段对其数据进行降噪处理,是实现精准定位的关键。二是各个传感器坐标系之间的转换以及时钟同步的处理,如何获取每个传感器在同一时间的数据信息。三是将多传感器的冗余或互补信息在空间或时间上进行组合,如何获得一致的信息。
针对上述问题,笔者认为一方面要围绕SLAM 进行自主导航系统的感知定位,通过将 GNSS/INS 组合导航的输出信息应用到激光雷达SLAM 的过程当中,以实现GNSS、INS、激光雷达3者的多源信息融合,补充目前 SLAM 信号源方面的研究,另一方面要从路径规划和路径跟踪的研究现状、果园环境的实际需要和实验室的硬件条件出发,找到果园环境下全局路径规划、行间路径规划以及路径跟踪控制的方法。开发基于GNSS、INS、激光雷达3者多源信息融合的果园移动机器人自主导航系统,实现果园移动机器人在复杂环境下稳定、高精度的自主导航,有力支撑无人化智慧果园的建设。
3 基于多源信息融合的果园移动机器人自主导航系统研究方案
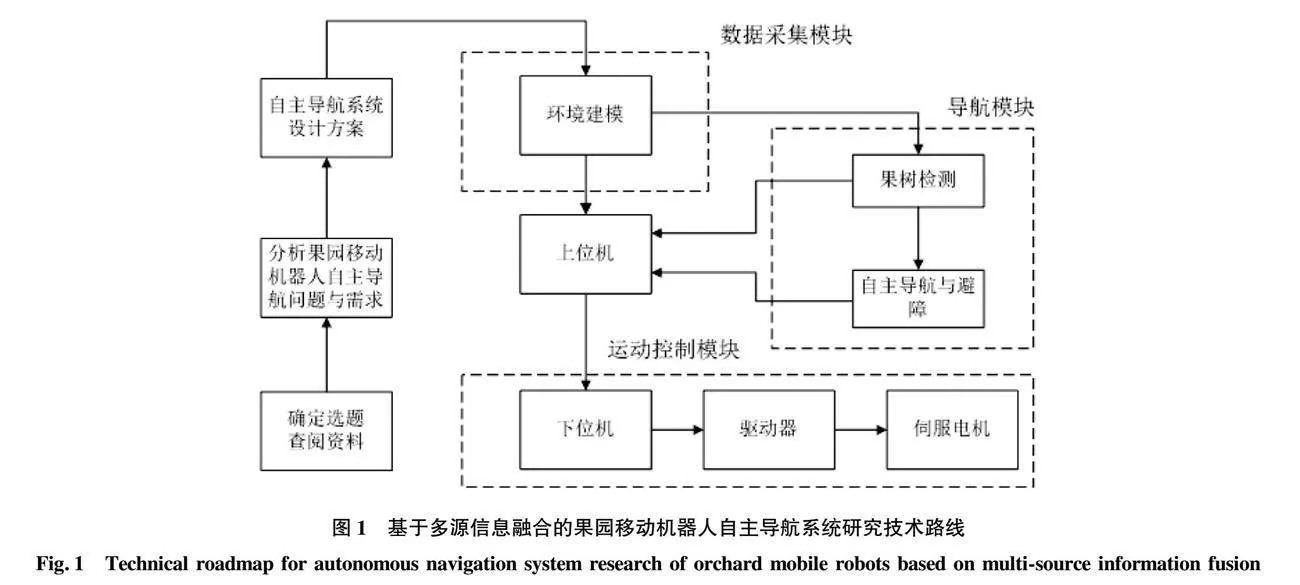
基于多源信息融合的果园移动机器人自主导航系统研究技术路线如图1所示。
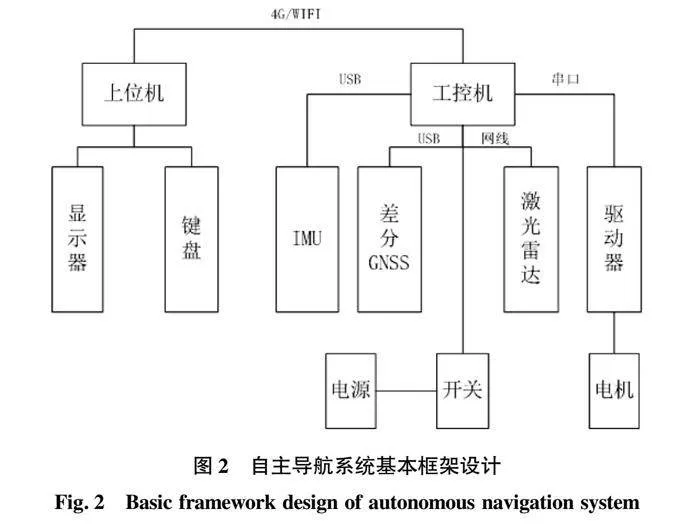
果园移动机器人自主导航系统框架设计如图2所示。将果园机器人自主导航系统分为3个关键部分:感知定位与建图、路径规划、路径跟踪控制,最后通过试验检验该系统的自主导航是否达到预期的效果。
3.1 果园移动机器人自身定位与感知地图算法研究 将INS与GNSS数据进行卡尔曼滤波融合,得到果园移动机器人准确的航向角与运动状态,并与激光雷达扫描到的果园环境数据进行SLAM算法融合(图3)。在建图过程中,可根据GNSS在信号良好的条件下提供的绝对定位对SLAM进行回环检测,从而提高建图的精度与鲁棒性。可能用到的感知方法有EKF-SLAM、霍夫变换、最小二乘法等。
3.2 果园移动机器人路径规划与控制策略算法研究
3.2.1 路径规划。果园路径规划主要分为全局路径规划和局部路径规划,全局路径规划拟采用A*或RRT(rapidly exploring random tree)算法,最终以梭行的方式完成全局路径规划。局部路径规划可能用到的方法有人工势场法、蚁群算法等,可赋予机器人实时避障的功能。
3.2.2 路径跟踪控制。建立机器人运动学模型,并运用路径追踪控制算法(PID算法、自适应控制算法、遗传算法等)完成机器人轨迹跟踪。
3.3 果园移动机器人自主导航系统试验研究 针对不同行距的果园环境,设计试验方案,测试机器人自主导航系统稳定性及精度,检验果园移动机器人自主导航系统运行效果。
4 结语
当前,我国正加大力度推进农机装备智能化的创新研究,大田作业的农机智能化水平已迈上新台阶,但果园农机装备的智能化研究则非常缺乏,果园生产和管理的智能化水平和生产效率还有比较大的提升空间。由于果园环境的特殊性即半结构化,大型机械设备在其中进行作业的难度较大,在一定程度上制约了果园机械化的发展。果园机器人具有良好的环境适应性,其普遍应用是实现我国果园装备智能化的必经之路,能够大大减少劳动力的投入,提高劳动效率。
参考文献
[1]
HAN J H,PARK C H,PARK Y J,et al.Preliminary results of the development of a single-frequency GNSS RTK-based autonomous driving system for a speed sprayer[J].Journal of sensors,2019,2019:1-9.
[2] VADAKKE VEETTIL S,AQUINO M,MARQUES H A,et al.Mitigation of ionospheric scintillation effects on GNSS precise point positioning (PPP) at low latitudes[J].Journal of geodesy,2020,94(2):1-10.
[3] 危双丰,庞帆,刘振彬,等.基于激光雷达的同时定位与地图构建方法综述[J].计算机应用研究,2020,37(2):327-332.
[4] LI G Q,YU L,FEI S M.A deep-learning real-time visual SLAM system based on multi-task feature extraction network and self-supervised feature points[J].Measurement,2021,168:1-10.
[5] SUN W X,WANG J,JIN F X,et al.A quality improvement method for 3D laser slam point clouds based on geometric primitives of the scan scene[J].International journal of remote sensing,2021,42(1):378-388.
[6] KOIDE K,MIURA J,YOKOZUKA M,et al.Interactive 3D graph SLAM for map correction[J].IEEE robotics and automation letters,2021,6(1):40-47.
[7] ZHANG S,GUO C Y,GAO Z N,et al.Research on 2D laser automatic navigation control for standardized orchard[J].Applied sciences,2020,10:1-19.
[8] JONES M H,BELL J,DREDGE D,et al.Design and testing of a heavy-duty platform for autonomous navigation in kiwifruit orchards[J].Biosystems engineering,2019,187:129-146.
[9] RADCLIFFE J,COX J,BULANON D M.Machine vision for orchard navigation[J].Computers in industry,2018,98:165-171.
[10] DURAND-PETITEVILLE A,LE FLECHER E,CADENAT V,et al.Tree detection with low-cost three-dimensional sensors for autonomous navigation in orchards[J].IEEE robotics and automation letters,2018,3(4):3876-3883.
[11] JGER-HANSEN C L,GRIEPENTROG H W,ANDERSEN J C.Navigation and tree mapping in orchards[R].Valencia,Spain:International Conference of Agricultural Engineering,2012:1-7.
[12] SHALAL N,LOW T,MCCARTHY C,et al.Orchard mapping and mobile robot localisation using on-board camera and laser scanner data fusion-Part B:Mapping and localisation[J].Computers and electronics in agriculture,2015,119:267-278.
[13] SHAMSUDIN A U,OHNO K,HAMADA R,et al.Consistent map building in petrochemical complexes for firefighter robots using SLAM based on GPS and LIDAR[J].Robomech journal,2018,5(1):1-13.
[14] COSTLEY A,CHRISTENSEN R.Landmark aided GPS-denied navigation for orchards and vineyards[C]//IEEE/ION position,location and navigation symposium(PLANS).Portland,OR,USA:IEEE,2020.
[15] QIAN C,LIU H,TANG J,et al.An integrated GNSS/INS/LiDAR-SLAM positioning method for highly accurate forest stem mapping[J].Remote sensing,2017,9(1):1-16.
[16] 熊斌,张俊雄,曲峰,等.基于BDS的果园施药机自动导航控制系统[J].农业机械学报,2017,48(2):45-50.
[17] 汤巍,王冠凌.基于激光雷达的智能小车SLAM研究[J].绥化学院学报,2020,40(5):144-148.
[18] 武二永,项志宇,沈敏一,等.大规模环境下基于激光雷达的机器人SLAM算法[J].浙江大学学报(工学版),2007,41(12):1982-1986.
[19] 文国成,曾碧,陈云华.一种适用于激光SLAM大尺度地图的闭环检测方法[J].计算机应用研究,2018,35(6):1724-1727,1732.
[20] 贾浩.基于Cartographer算法的SLAM与导航机器人设计[D].济南:山东大学,2019.
[21] 刘沛,陈军,张明颖.基于激光导航的果园拖拉机自动控制系统[J].农业工程学报,2011,27(3):196-199.
[22] 李莹.基于SLAM激光点云的室内三维建模方法研究[D].焦作:河南理工大学,2019.
[23] 李会宾,韩伟,史云.果园作业机器人的自主行间导航系统研究[J].中国农业信息,2019,31(4):51-64.
[24] 张向阳.果园移动机器人导航与避障方法研究[D].合肥:中国科学技术大学,2020.
[25] 李斌,李慧,葛蓁.自主导航果园作业机器人设计:基于自适应遗传算法和样条曲线[J].农机化研究,2017,39(2):47-51.
[26] 聂森.基于组合信息的果园移动机器人检测系统研究[D].杨凌:西北农林科技大学,2016.
[27] 叶小琴,陈超.基于图像边界提取的果园作业机器人自主导航系统[J].农机化研究,2017,39(8):202-206.
[28] 王毅,刘波,熊龙烨,等.基于深度学习的果园道路导航线生成算法研究[J].湖南农业大学学报(自然科学版),2019,45(6):674-678.
[29] 邓世燕,郭承军.基于多传感器融合的即时定位与地图构建方法研究[C]//第十一届中国卫星导航年会论文集:S13 自主导航.北京:中科北斗汇(北京)科技有限公司,2020:96-101.
[30] 刘树奇.基于ROS的未知环境下履带式机器人的自主建图导航技术研究[D].济南:山东大学,2020.
[31] 李秀智,贾松敏.基于多源融合式SLAM的机器人三维环境建模[J].北京理工大学学报,2015,35(3):262-267.
[32] 陆世东,涂美义,罗小勇,等.基于图优化理论和GNSS激光SLAM位姿优化算法[J].激光与光电子学进展,2020,57(8):216-225.
[33] 倪志康,厉茂海,林睿,等.基于三维激光雷达与RTK融合的SLAM研究[J].制造业自动化,2020,42(7):51-54.
[34] 聂森,王丙龙,郝欢欢,等.基于机器视觉的果园导航中线提取算法研究[J].农机化研究,2016,38(12):86-89.
[35] 魏少东.基于GPS和惯性导航的果园机械导航系统研究[D].杨凌:西北农林科技大学,2013.
[36] 冀鹏.果园作业机器人自主导航控制系统研究与设计[D].南京:南京理工大学,2019.
[37] 吴丛磊.基于多源信息融合的果园拖拉机自主驾驶系统研究[D].南京:东南大学,2019.
