基于动态遗忘因子递推最小二乘法和改进粒子滤波算法的锂电池SOC估计
2024-07-05卢昊,李广军,张兰春
卢昊,李广军,张兰春
摘要: 为了提高锂电池荷电状态 (SOC)估计的精度,提出了一种基于动态遗忘因子递推最小二乘法和改进粒子滤波算法相结合的锂电池SOC估计方法。针对固定遗忘因子递推最小二乘法在电池参数辨识中难以同时保持快速收敛和稳定性的问题,引入动态遗传因子,以模型辨识值和实际值的残差为变量构建修正公式,实现遗忘因子动态调整。为了改善粒子滤波(PF)的粒子多样性丧失问题,采用白鹭群优化算法(ESOA)对粒子滤波算法进行优化。仿真结果表明,基于动态遗忘因子递推最小二乘法和改进粒子滤波算法的锂电池SOC估计误差始终保持在0.3%以内,平均绝对误差和标准差为0.15%和0.17%,与其他算法相比具有更好的精度和稳定性。
关键词: 锂电池;电池荷电状态(SOC);动态遗忘因子;递推最小二乘法;白鹭群优化算法;粒子滤波
DOI: 10.3969/j.issn.1001-2222.2024.03.011
中图分类号:TM912文献标志码: B文章编号: 1001-2222(2024)03-0066-08
由于全球气候变化和化石燃料价格上涨,新能源汽车开始逐步取代燃油车,成为人们出行的主要交通方式之一[1]。锂电池由于其高能量密度、长寿命和低污染等特点[2-3],在新能源汽车领域被广泛应用。新能源汽车的稳定运行离不开一个高效、安全的电池管理系统(battery management system,BMS)来监测和保护电池[4],电池荷电状态(state of charge,SOC)是BMS最重要的参数之一。电池SOC值不能通过传感器直接获得,而是使用预设的估计算法获得。因此,获得准确的SOC估值是保证新能源汽车稳定运行的关键。
在针对电池的参数辨识和SOC估计方面,国内外学者做了大量的研究。杨宇伦等[5]针对参数辨识精度低和模型泛化能力差的问题,提出基于改进鸡群优化算法的电池模型参数辨识方法,通过多种改进策略改善了鸡群算法的全局和局部寻优能力,提高了电池参数辨识的精度和鲁棒性,但采用启发式算法进行参数辨识存在计算量过大的问题。吴忠强等[6]提出了一种基于遗忘因子递推最小二乘和灰狼(grey wolf optimization,GWO)粒子滤波(particle filter,PF)算法相结合的电池SOC 估计方法,引入遗忘因子缓解了递推最小二乘法的数据饱和现象,利用GWO算法改善了PF算法的粒子退化问题,提高了SOC估计精度,但遗忘因子递推最小二乘法存在无法同时保持参数辨识的快速收敛和稳定性的问题。Y.K. Chu 等[7]对郊狼优化算法(coyote optimization algorithm,COA)进行改进,将改进的COA算法和自适应平方根的容积卡尔曼滤波算法(adaptive square-root cubature kalman filter,ASRCKF)相结合,在建立精确的二阶RC模型的基础上,通过AGCOA-ASRCKF算法来估算锂电池的SOC,降低了SOC的估计误差,但运用智能优化算法对SOC进行估计同样存在计算量过大的问题。卢云帆等[8]采用无迹卡尔曼滤波算法(unscented kalman filter,UKF)对电池模型参数进行在线辨识,再结合自适应无迹卡尔曼滤波算法(adaptive unscented kalman filter,AUKF)对锂电池SOC进行估计,将时变参数反馈到模型中,提高SOC估计精度,但AUKF算法是通过对非线性系统的后验概率密度进行高斯假设来解决非线性问题,难以适用于一般的非线性非高斯分布问题。采用智能优化算法对电池进行参数辨识存在计算量过大的问题,采用遗忘因子递推最小二乘法对电池进行参数辨识虽然减小了计算量,但遗忘因子是一个固定的值,无法同时保持快速收敛和稳定性,遗忘因子变大,稳定性变好,收敛速度变慢,遗忘因子变小,收敛速度变快,稳定性变差[9-10]。本研究在遗忘因子递推最小二乘法的基础上引入动态遗传因子,以模型辨识值和实际值的残差为变量构建修正公式,实现遗忘因子动态调整,从而保持算法的快速收敛和稳定性。粒子滤波算法适用于非线性非高斯问题,传统粒子滤波算法为了抑制粒子退化,引入了重采样算法,但这种算法将导致粒子多样性的丧失[11-12],即权重大的粒子被大量复制,权重小的粒子被舍弃,从而降低滤波精度。本研究采用白鹭群优化算法指导粒子集合的采样过程,优化粒子分布,提高PF算法的粒子多样性,从而提高SOC估计精度。
本研究以锂电池为研究对象,建立锂电池的二阶RC等效电路模型,提出一种动态遗忘因子递推和最小二乘法的电池参数辨识方法,并引入白鹭群优化算法(egret swarm optimization algorithm,ESOA)指导粒子集合的采样过程。最后联合两种算法对电池进行SOC估计,并通过仿真试验对该方法进行验证。车用发动机2024年第3期2024年6月卢昊, 等: 基于动态遗忘因子递推最小二乘法和改进粒子滤波算法的锂电池SOC估计
1电池模型的建立
1.1二阶RC等效电路模型
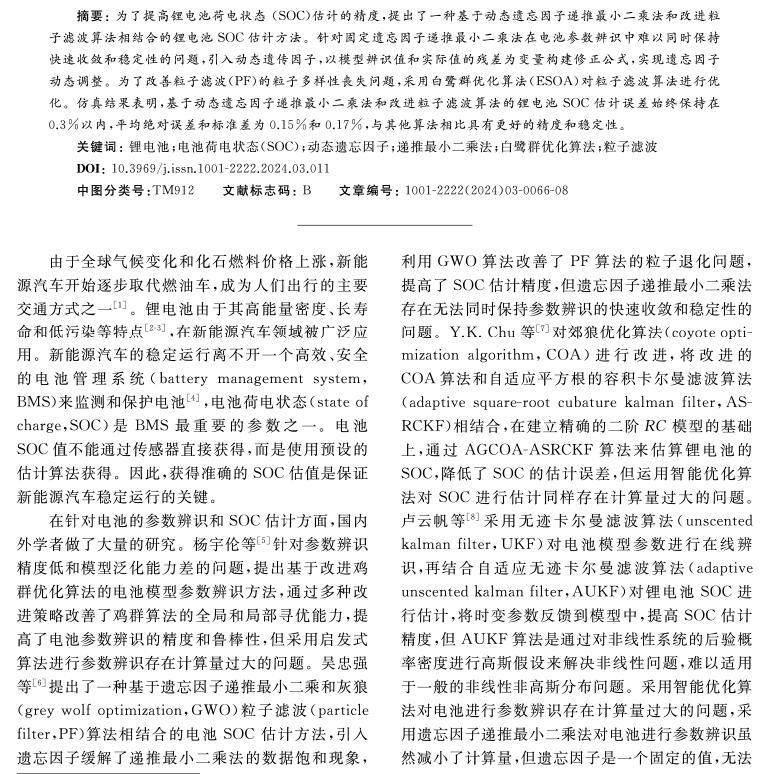
电池等效电路模型通常由一个电阻和多个并联的电阻、电容(RC)串联构成,随着RC个数的增加,模型的精确度和复杂度也随之增加[13-14],综合考虑,选择二阶RC等效电路模型,如图1所示。
图中:UL为电池的端电压;UOC为电池的开路电压;R为电池内阻,用于模拟充放电过程中电池两端电压变化;R1,C1和R2,C2组成两对RC回路,用于模拟工作过程中电池两端电压变化;Im为电池工作电流。
1.2等效模型状态方程
依据图1所示模型,由基尔霍夫定律可得以下方程:
Im=U1R1+C1dU1dk
Im=U2R2+C2dU2dk
UL=UOC-U1-U2-RIm。(1)
电池SOC计算公式如下所示:
SOC(k)=SOCk0-ηQc∫kk0Idk。(2)
式中:k0为初始时刻;k为当前时刻;η为放电效率;Qc为电池标定容量。
对式(1)和式(2)进行离散化,可得到状态方程(3)和量测方程(4),如下所示:
xk=fxk-1,ωk,(3)
zk=gxk,vk,(4)
xk=SOC(k)
U1(k)
U2(k),(5)
fxk-1,ωk=100
0e-ΔkR1C10
00e-ΔkR2C2SOC(k-1)
U1(k-1)
U2(k-1)+
ΔkQc
R11-e-ΔkR1C1
R21-e-ΔkR2C2Im(k-1)+ωk,(6)
gxk,vk=UL(k),(7)
UL(k)=UOC(k)-U1-U2-ImR+vk。(8)
式中:xk为k时刻状态变量;xk-1为k-1时刻状态变量;ωk为系统过程噪声;zk为k时刻量测变量;vk为系统量测噪声。
2模型参数在线辨识
2.1开路电压(UOC)与SOC关系拟合
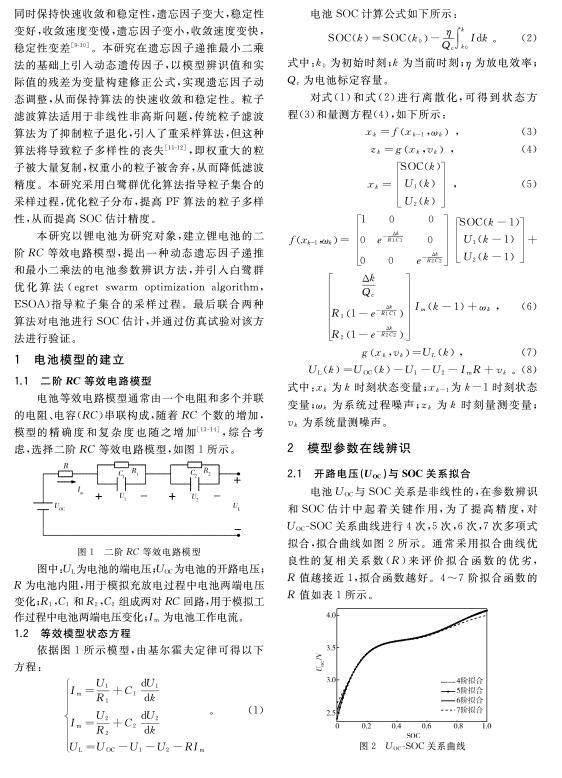
电池UOC与SOC关系是非线性的,在参数辨识和SOC估计中起着关键作用,为了提高精度,对UOC-SOC关系曲线进行4次,5次,6次,7次多项式拟合,拟合曲线如图2所示。通常采用拟合曲线优良性的复相关系数(R)来评价拟合函数的优劣,R值越接近1,拟合函数越好。4~7阶拟合函数的R值如表1所示。
由图2和表1可以看出,4~7阶拟合函数几乎重合,6阶和7阶拟合函数R值相同且最接近1,考虑到拟合函数阶数越高计算越复杂,本研究选择6阶拟合,6阶多项式拟合函数如式(9)所示。
UOC=q1n6+q2n5+q3n4+q4n3+q5n2
+q6n1+q7。(9)
式中:q1=20.760 0;q2=-63.110 0;q3=63.810 0;q4=-16.870 0;q5=-9.588 0;q6=6.537 0;q7=2.527 0。
2.2模型最小二乘数学形式推导
对锂电池等效电路模型进行在线参数辨识,需要将模型转换成可应用最小二乘法的数学形式,由式(1)可得:
G(s)=UOC(s)-UL(s)Im(s)=
τ1τ2Rs2+Rτ1+τ2+R1τ2+R2τ1sτ1τ2s2+τ1+τ2s+1+
R+R1+R2τ1τ2s2+τ1+τ2s+1。(10)
式中:G(s)为传递函数;τ1=R1C1;τ2=R2C2。
s=2T·1-z-11+z-1。(11)
式中:T为采样周期;z为离散化算子。
运用双线性变换公式(式(11))对式(10)进行离散化,可得差分方程:
y(k)=UOC(k)-UL(k)=a1y(k-1)+
a2y(k-2)+a3Im(k)+
a4Im(k-1)+a5Im(k-2)。(12)
式中:y(k)为系统输出;a1,a2,a3,a4,a5为辨识参数。
令θ=a1,a2,a3,a4,a5T,φ(k)=y(k-1),y(k-2),Im(k),Im(k-1),Im(k-2)T,则系统可以表示为
y(k)=φ(k)Tθ。(13)
式中: θ为辨识参数矩阵。
2.3遗忘因子递推最小二乘法
在遗忘因子递推最小二乘法中,遗忘因子λ取值范围通常为[0.95,1.00],通过遗忘因子乘以旧数据,能够对新旧数据的权重进行重新分配,从而避免数据冗余,缓解数据饱和现象[15-16]。遗忘因子递推最小二乘法具体递推公式如下:
θ(k)=θ(k-1)+
K(k)y(k)-φT(k)θ(k-1),(14)
P(k)=1λim-K(k)φT(k)P(k-1),(15)
K(k)=P(k-1)φ(k)
λ+φT(k)P(k-1)φ(k)-1。(16)
式中:K(k)为增益系数;P(k)为误差协方差矩阵。
遗忘因子λ越小,即新数据的权重越大,在递推时能够更好地反映系统的动态特性,跟踪效果变好,算法的收敛速度会得到提升;遗忘因子λ越大,即旧数据权重越大,在递推时偏向整体最优,算法的跟踪效果变差,但算法的稳定性会得到提升[9-10]。文中提出的动态遗忘因子递推最小二乘法能够同时保持算法的快速收敛和稳定性。
2.4动态遗忘因子递推最小二乘法
采用遗忘因子递推最小二乘法进行参数辨识,算法中的遗忘因子λ通常是一个不变的值,不论遗忘因子λ如何取值,算法的稳定性和快速收敛都会有一定的牺牲。为了解决上述问题,同时保持算法的快速收敛和稳定性,在递推最小二乘法中引入动态遗忘因子,根据辨识结果和实际值的实时残差,对遗忘因子进行动态调整。k时刻的实时残差可表示为
ε(k)=y(k)-φT(k)θ(k-1)。(17)
残差ε(k)主要由辨识误差引起,测量噪声对ε(k)影响很小。为了同时保持算法的快速收敛和稳定性,在残差ε(k)较大时,需实时调小遗忘因子,提升算法的跟踪速度,保证快速收敛;在残差ε(k)较小时,需实时调大遗忘因子,综合之前递推的旧数据,提高稳定性。建立的遗忘因子λ修正公式为
λ(k)=α+(1-α)e-γε(k)。(18)
式中:α为接近但小于1的数;γ为可调的正参数。
动态遗忘因子参数辨识流程图如图3所示,动态遗忘因子递推最小二乘法具体递推公式如下:
(k)=(k-1)+
K(k)y(k)-φT(k)(k-1),(19)
P(k)=1λ(k)E-K(k)φT(k)P(k-1),(20)
K(k)=P(k-1)φ(k)[λ(k)+
φT(k)P(k-1)φ(k)]-1。(21)
2.5参数辨识仿真验证及分析
遗忘因子λ取值范围通常为[0.95,1.00],为验证改进算法的优越性,取λ折中值为0.975时的遗忘因子递推最小二乘法和动态遗忘因子递推最小二乘法进行对比试验。遗忘因子动态变化曲线如图4所示。
图5至图10为18650锂电池在间歇恒流放电工况(25 ℃)下两种参数辨识方法的辨识误差结果。由图5至图10可见,两种算法在辨识初期都出现了误差较大的现象,这是由辨识参数初始值设置不准确导致的。由图5和图7能够明显看出动态遗忘因子递推最小二乘法参数辨识的优越性,但由图6、图8、图9、图10不能够明显看出。为了更好地对比两种算法的辨识结果,删去了前300 s的数据,对R1,C1,C2参数和端电压收敛后辨识结果的平均绝对误差和标准差进行了统计,统计结果如表2至表5所示。
由表2至表5可知,对于R1, C1,C2和端电压参数辨识的平均绝对误差和标准差,动态遗忘因子递推最小二乘法均比固定遗忘因子递推最小二乘法有所降低,说明动态遗忘因子递推最小二乘法相比固定遗忘因子递推最小二乘法有更高的辨识精度。
3基于动态遗忘因子递推最小二乘法和改
进粒子滤波算法的SOC估计
3.1粒子滤波算法
粒子滤波算法本质上是对重要性密度函数进行采样,得到一组随机的样本(粒子),然后计算不同粒子的权值,对粒子集和其权值进行加权,用样本均值代替积分运算[17-18],它在解决非线性与非高斯的问题上表现优异。
令状态初始后验概率密度p(x0|z0)=p(x0),则k时刻状态预测方程为
pxk|z1:k-1=
∫pxk|xk-1pxk-1|z1:k-1dxk-1,(22)
k时刻状态更新方程为
pxk|z1:k=pzk|xkpxk|z1:k-1pxk|z1:k-1,(23)
pxk|z1:k-1=
∫pzk|xkpxk|z1:k-1dxk。(24)
式中:zk为k时刻系统的量测值。
设重要性概率密度函数q(x0:k|z1:k)具备如下性质:
qx0:k|z1:k=
qx0:k-1|z1:k-1qxk|z0:k-1,zk。(25)
则权值公式为
wk=pz1:k|x0:kpx0:kqxk|x0:k-1,z1:kqx0:k-1:z1:k-1。(26)
从p(xk|z1:k)中采集N个样本点{xik-1}Ni=1,获得后验概率密度函数估计:
pxk|z1:k=∑Ni=1wikδxk-xik。(27)
式中:xik为采样样本;δ(·)为狄拉克函数;wik为样本权值;N为粒子总数。
则重要性权值更新公式为
wik=wik-1pzk|xikpxik|xik-1qxik|xi0:k-1,z1:k。(28)
对粒子权值做归一化处理:
wik=wik∑Ni=1wik。(29)
计算状态估计值:
k=∑Ni=1wikxik。(30)3.2白鹭群优化算法
传统粒子滤波算法为了抑制粒子退化,引入了重采样算法,但这种算法将导致粒子多样性的丧失[11-12],即权重大的粒子被大量复制,权重小的粒子被舍弃。为了改善这一问题,本研究采用白鹭群优化算法对粒子滤波算法进行优化,使粒子保持一定的多样性。
白鹭群优化算法源于雪白鹭和大白鹭的捕食行为,由坐等策略、激进策略和判别条件组成[19-20]。白鹭群被分为n个小组,1个小组由3只白鹭组成:白鹭A采用坐等策略,白鹭B和白鹭C分别采用激进策略中的随机行走和包围机制。
1) 坐等策略。第i个白鹭A的观测方程可以用i=Exi来描述,每次迭代可以获得真实适应度yi,能够求得量测方程中权重的伪梯度gi。白鹭A位置更新公式如下所示:
xa,i=xi+
exp-t0.1·tmax·0.1·hop·gi。(31)
式中:xa,i为第i个白鹭A的位置;xi为白鹭群的位置;t为当前迭代的次数;tmax为最大迭代的次数;hop为自变量的可行域范围。
2) 随机行走。白鹭B位置更新公式如下所示:
xb,i=xi+tanrb,i·hop1+t。(32)
式中:xb,i为第i个白鹭B的位置;rb,i为(-π/2,π/2)之间的随机数。
3) 包围机制。白鹭C位置更新公式如下所示:
xc,i=1-ri-rg·xi+ri·Dh+rg·Dg,(33)
Dh=xibest-xi,(34)
Dg=xgbest-xi。(35)
式中:Dh为白鹭群当前位置与白鹭小队最佳位置之间的差异矩阵;Dg为白鹭群当前位置与白鹭群最佳位置之间的差异矩阵;xibest为白鹭小队位置最优值;xgbest为白鹭群位置最优值;xc,i为第i个白鹭C的位置;ri,rg为0~0.5之间的随机数。
根据白鹭A、白鹭B和白鹭C更新的位置计算出白鹭小队更新的位置:
xs,i=xa,ixb,ixc,i,(36)
ys,i=ya,iyb,iyc,i,(37)
ci=argminys,i,(38)xi=xs,ici,ys,i|,ci xi,else。(39) 式中:xs,i为白鹭小队的位置;ys,i为白鹭小队位置xs,i的适应度值;ci为白鹭小队位置xs,i的最小适应度值。 3.3SOC估计 基于动态遗忘因子递推最小二乘法和改进粒子滤波算法的SOC估计步骤如下所示。 1) 初始化,设置SOC和电池模型参数辨识的初始值。 2) 根据k时刻电池的SOC值和UOC-SOC函数关系求得k时刻的UOC值。 3) 采用动态遗忘因子递推最小二乘法对电池模型参数进行在线辨识,输出辨识结果。 4) 使用实时模型参数更新ESOAPE算法各参数矩阵,利用ESOAPF算法估计出k+1时刻电池的SOC值,然后返回步骤2。 基于动态遗忘因子递推最小二乘法和改进粒子滤波算法的联合估计能够相互更新和校正,避免误差的累积,联合估计算法的流程图如图11所示。 4仿真试验与结果分析 采用动态遗忘因子递推最小二乘法和改进粒子滤波算法(ESOAPF)相结合的算法进行SOC估计,并与动态遗忘因子-粒子滤波算法、固定遗忘因子-改进粒子滤波算法、固定遗忘因子-粒子滤波算法所得到的SOC估计结果进行比较。SOC估计结果如图12所示,SOC估计误差如图13所示。 由图12可以看出,采用动态遗忘因子递推最小二乘法和改进粒子滤波算法得到的SOC估计值精度最高,始终贴合真实值;其他3种算法在2 000 s前都能做到贴合真实值,但在2 000 s后,3种算法先后出现偏离真实值的情况,其中动态遗忘因子-粒子滤波算法和固定遗忘因子-粒子滤波算法更早出现偏差,且偏差越来越大。 由图13可以看出,采用动态遗忘因子递推最小二乘法和改进粒子滤波算法得到的SOC估计误差最小,且误差曲线没有出现剧烈波动;固定遗忘因子-改进粒子滤波算法的误差曲线在2 300 s前与动态遗忘因子-改进粒子滤波算法的误差曲线基本重合,但在2 300 s后误差曲线出现较大波动;动态遗忘因子-粒子滤波算法的误差曲线在1 300 s前与动态遗忘因子-改进粒子滤波算法的误差曲线基本重合,但在1 300 s后误差曲线出现较大波动,且波动越来越大;固定遗忘因子-粒子滤波算法的误差曲线最先出现较大波动,相较于其他3种算法波动最大。为了进一步比对4种算法的SOC估计结果,对4种算法的最大误差、平均绝对误差、标准差以及运行时间进行了统计,统计结果如表6所示。 由表6可以看出,采用动态遗忘因子递推最小二乘法进行参数辨识的SOC估计精度要普遍高于采用固定遗忘因子递推最小二乘法进行参数辨识。采用改进粒子滤波算法进行SOC估计运行时间变长,但精度更高。5结束语 针对固定遗忘因子递推最小二乘法难以同时保持快速收敛和稳定性的问题,提出了一种动态遗忘因子递推最小二乘法,根据遗忘因子越大、稳定性越好、收敛速度越慢,遗忘因子越小、收敛速度越快、稳定性越差的特性,引入动态遗忘因子,以模型辨识值和实际值的残差为变量构建修正公式,实现遗忘因子动态调整。采用白鹭群优化算法改进粒子滤波算法,优化了粒子分布,改善了粒子滤波算法的粒子多样性丧失问题。仿真试验表明:动态遗忘因子递推最小二乘法进行参数辨识时,遗忘因子能够根据辨识结果和实际值的实时残差进行动态调整,相比固定遗忘因子递推最小二乘法,有更高的辨识精度;白鹭群优化算法能够有效改善粒子滤波算法粒子多样性丧失的问题,从而提高粒子滤波算法的滤波精度;动态遗忘因子递推最小二乘法和改进粒子滤波算法相结合的SOC估计方法估计误差始终保持在0.3%以内,平均绝对误差和标准差分别为0.15%和0.17%,相较于其他算法具有更好的估计精度。 参考文献: [1]Qinghe L I U,Quanqing Y U.The lithium battery SOC estimation on square root unscented Kalman filter[J].Energy Reports,2022,8:286-294. [2]任碧莹,孙佳,孙向东,等.提高串联锂电池SOC在线估计快速性的简化二阶模型[J].电力系统保护与控制,2022,50(22):110-118. [3]刘素贞,袁路航,张闯,等.基于超声时域特征及随机森林的磷酸铁锂电池荷电状态估计[J].电工技术学报,2022,37(22):5872-5885. [4]张振宇,汪光森,聂世雄,等.脉冲大倍率放电条件下磷酸铁锂电池荷电状态估计[J].电工技术学报,2019,34(8):1769-1779. [5]杨宇伦,凌铭.基于改进鸡群优化算法的质子交换膜燃料电池模型参数辨识[J].太阳能学报,2023,44(2):269-278. [6]吴忠强,胡晓宇,马博岩,等.基于RFF及GWO-PF的锂电池SOC估计[J].计量学报,2022,43(9):1200-1207. [7]Chu Y,Li J,Gu J,et al.Parameter identification and SOC estimation of lithium-ion batteries based on AGCOA-ASRCKF[J].Journal of Power Electronics,2023,23(2):308-319. [8]卢云帆,邢丽坤,张梦龙,等.基于UKF-AUKF锂电池在线参数辨识和SOC联合估计[J].电源技术,2022,46(10):1151-1155. [9]黄锐.基于可变遗忘因子递推最小二乘法的三元锂电池荷电状态估计[D].重庆:重庆大学,2022. [10]赵旭楷,刘兆霆.变遗忘因子递推最小二乘Hammerstein系统辨识算法[J].信号处理,2022,38(2):432-438. [11]李冀,周战洪,贺红林,等.基于围猎改进哈里斯鹰优化的粒子滤波方法[J].电子与信息学报,2023,45(6):2284-2292. [12]贺宁,钱成,李若夏.自适应模型与改进粒子滤波的电池RUL预测[J].哈尔滨工业大学学报,2022,54(9):111-121. [13]Yang B,Li G,Tang W,et al.Research on optimized SOC estimation algorithm based on extended kalman filter[J].Frontiers in Energy Research,2022,10:1027439. [14]孙金磊,唐传雨,李磊,等.基于状态与模型参数联合估计的老化电池可充入电量估计方法[J].电工技术学报,2022,37(22):5886-5898. [15]Li M,Zhang Y,Hu Z,et al.A battery SOC estimation method based on AFFRLS-EKF[J].Sensors,2021,21(17):5698. [16]何晋,马睿飞,蔡琦琳,等.基于递推最小二乘法的锂电池内短路全寿命周期辨识[J].机械工程学报,2022,58(17):96-104. [17]Wan J,Xu C,Qiao Y,et al.Error constraint enhanced particle filter using quantum particle swarm optimization[J].IEEE Sensors Journal,2021,21(21):24431-24439. [18]田梦楚,柳林燕,陈志敏,等.基于弹性机制的萤火虫优化粒子滤波算法[J/OL].控制与决策:1-9[2023-10-18]. [19]Chen Z,Francis A,Li S,et al.Egret swarm optimization algorithm: an evolutionary computation approach for model free optimization[J].Biomimetics,2022,7(4):144. [20]Li T,Liu Y,Chen Z.Application of Sine Cosine Egret Swarm Optimization Algorithm in Gas Turbine Cooling System[J].Systems,2022,10(6):201.SOC Estimation of Lithium Battery Based on Dynamic Forgetting Factor Recursive Least Squares and Improved Particle Filtering Algorithm LU Hao,LI Guangjun,ZHANG Lanchun (College of Automobile and Transportation Engineering,Jiangsu University of Technology,Changzhou213001,China) Abstract: In order to improve the accuracy of SOC estimation for lithium battery, a lithium battery SOC estimation method was proposed based on the combination of dynamic forgetting factor recursive least squares and improved particle filtering algorithm. The fixed forgetting factor recursive least squares method was difficult to maintain the fast convergence and recognition accuracy at the same time in battery parameter identification, a dynamic genetic factor was hence introduced and the residual difference between the identified and actual values of model was used as the variable to construct a correction formula to achieve the dynamic adjustment of forgetting factor. In order to improve the problem of particle diversity loss in particle filter (PF), the egret swarm optimization algorithm (ESOA) was used to optimize the particle filtering algorithm. The simulation results show that the estimation error of lithium battery SOC always remains within 0.3% after using the dynamic forgetting factor recursive least squares method and the improved particle filtering algorithm, with the mean absolute error and standard deviation of 0.15% and 0.17%. Compared with other algorithms, the new algorithm has better accuracy and stability. Key words: lithium battery;SOC;dynamic forgetting factor;recursive least square;egret swarm optimization algorithm;particle filter [编辑: 姜晓博]
